What Is My Robot Thinking? Design Considerations for Transparent and Trustworthy Shared Autonomy
Pith reviewed 2026-06-27 22:04 UTC · model grok-4.3
The pith
Feedback on inferred robot goals improves intent alignment in shared autonomy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
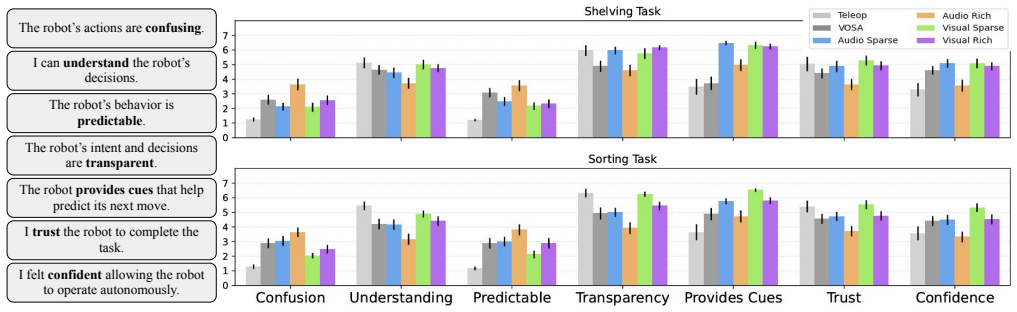
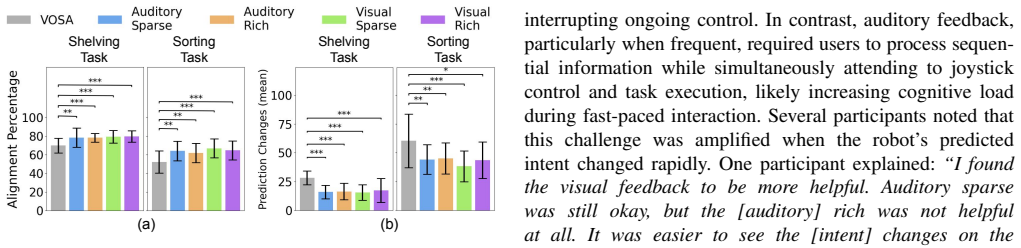
Providing feedback on the robot's inferred goal significantly improves intent alignment and reduces corrective intervention. Participants preferred visual over auditory feedback, while preferences for sparse versus rich information depended on task complexity. Revealing the full belief distribution did not consistently improve alignment or trust.
What carries the argument
Feedback designs that make the robot's inferred goal legible through visual or auditory interfaces in vision-based shared autonomy.
If this is right
- Feedback accelerates convergence to shared goals by making inference legible.
- Visual feedback is preferred to auditory feedback across tasks.
- Optimal information richness varies with task complexity.
- Maximal disclosure of the belief distribution is not required for effective coordination or trust.
Where Pith is reading between the lines
- Transparency guidelines could extend to other shared control applications like driving assistance.
- Adaptive interfaces that adjust detail based on user experience might further improve outcomes.
- Future work could test if these effects hold when inference accuracy is lower.
Load-bearing premise
Mismatches between the robot's inferred goals and the user's intended goals are the main source of friction in coordination.
What would settle it
A replication where adding feedback on inferred goals produces no reduction in corrective interventions or no improvement in alignment.
Figures

read the original abstract
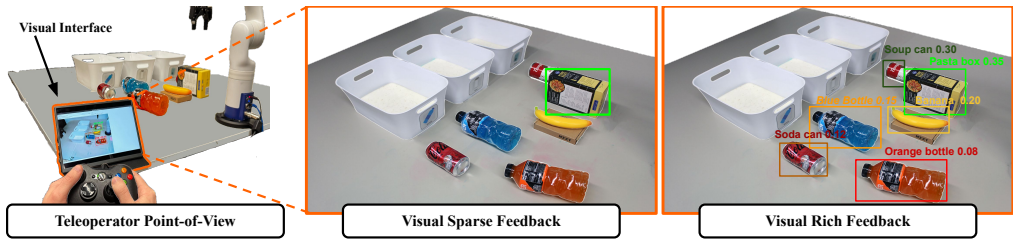
Assistive robots operating under shared autonomy must balance user control with autonomous assistance. Because robot actions depend on internal intent inference that is not directly observable, mismatches between inferred and intended goals can undermine coordination and trust. We investigate how interface-level transparency, including feedback modality (visual vs. auditory) and information richness (sparse vs. rich), shapes interaction in a vision-based shared autonomy system. In a user study with N=25 participants across two assistive manipulation tasks, we evaluate how these designs influence coordination and trust. Providing feedback significantly improves intent alignment and reduces corrective intervention, indicating that making the inferred goal legible accelerates convergence in shared control. Participants preferred visual over auditory feedback, while preferences for sparse versus rich information depended on task complexity. We also found that revealing the full belief distribution did not consistently improve alignment or trust. Together, these findings indicate that effective transparency enhances coordination primarily through goal legibility, while trust depends on task-appropriate information exposure rather than maximal disclosure. Based on these results, we outline guidelines for designing transparent shared autonomy systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript reports results from a user study (N=25) examining how interface transparency designs—feedback modality (visual vs. auditory) and information richness (sparse vs. rich, including full belief distribution)—affect coordination, intent alignment, corrective interventions, and trust in a vision-based shared autonomy system for two assistive manipulation tasks. It claims that providing feedback yields statistically significant gains in alignment and reduced interventions, that visual feedback is preferred, that sparse/rich preferences are task-dependent, and that full belief distribution does not consistently help; design guidelines are derived from these observations.
Significance. If the empirical results are supported by complete statistical reporting and controls, the work offers concrete, task-sensitive evidence that legible goal inference via feedback improves shared-control coordination more effectively than maximal disclosure. This directly informs practical interface design for assistive robots and contributes empirical grounding to transparency research in HRI.
major comments (2)
- [Abstract] Abstract and (presumably) §4/§5: the claim of statistically significant improvements in intent alignment and reduced interventions is presented without details on the specific tests, effect sizes, confidence intervals, exclusion criteria, or raw data distributions. With N=25 this information is load-bearing for evaluating whether the central claim about feedback benefits holds.
- [Results] Results section (task-dependent findings): the observation that full belief distribution did not consistently improve alignment or trust is central to the guideline that 'maximal disclosure' is not required, yet the manuscript provides no quantitative breakdown of per-task belief-distribution effects or power analysis to support the 'not consistently' conclusion.
minor comments (2)
- Clarify how 'intent alignment' is operationalized (e.g., distance to ground-truth goal, intervention count, or subjective rating) and ensure this definition is used consistently when comparing modalities.
- Figure captions and legends should explicitly state whether error bars represent standard error, 95% CI, or SD, and whether statistical significance markers are corrected for multiple comparisons.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback emphasizing statistical transparency and granularity. We will revise the manuscript to provide the requested details on tests, effect sizes, and per-task breakdowns while maintaining the core claims supported by our N=25 study.
read point-by-point responses
-
Referee: [Abstract] Abstract and (presumably) §4/§5: the claim of statistically significant improvements in intent alignment and reduced interventions is presented without details on the specific tests, effect sizes, confidence intervals, exclusion criteria, or raw data distributions. With N=25 this information is load-bearing for evaluating whether the central claim about feedback benefits holds.
Authors: We agree that full statistical reporting is necessary for evaluating the claims with N=25. In the revision we will add to §4/§5 (and reference in the abstract) the exact tests performed (e.g., paired t-tests or non-parametric equivalents), effect sizes, 95% confidence intervals, any participant exclusion criteria, and descriptive statistics or distribution summaries for the key metrics of intent alignment and corrective interventions. revision: yes
-
Referee: [Results] Results section (task-dependent findings): the observation that full belief distribution did not consistently improve alignment or trust is central to the guideline that 'maximal disclosure' is not required, yet the manuscript provides no quantitative breakdown of per-task belief-distribution effects or power analysis to support the 'not consistently' conclusion.
Authors: We will expand the Results section with a quantitative per-task breakdown of belief-distribution effects, including means, SDs, and direct statistical comparisons between sparse and rich conditions for each task. A post-hoc power discussion will be added to address the 'not consistently' phrasing; we note that the original design relied on pilot data rather than a priori power analysis, which we will acknowledge as a limitation. revision: partial
Circularity Check
No significant circularity
full rationale
The paper reports results from an empirical user study (N=25) evaluating feedback modalities in a vision-based shared autonomy system. No mathematical models, derivations, equations, parameter fittings, or uniqueness theorems are present. Central claims about improved intent alignment and reduced interventions follow directly from observed statistical outcomes across conditions, without any reduction to self-defined inputs, fitted parameters renamed as predictions, or load-bearing self-citations. The study design tests the hypotheses externally via participant data.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning latent actions to control assistive robots,
D. P. Losey, H. J. Jeon, M. Li, K. Srinivasan, A. Mandlekar, A. Garg, J. Bohg, and D. Sadigh, “Learning latent actions to control assistive robots,”Autonomous robots, vol. 46, no. 1, pp. 115–147, 2022
2022
-
[2]
Closing the capacity- ability gap: Using technology to support aging with disability,
T. L. Mitzner, J. A. Sanford, and W. A. Rogers, “Closing the capacity- ability gap: Using technology to support aging with disability,”Inno- vation in aging, vol. 2, no. 1, p. igy008, 2018
2018
-
[3]
Americans with disabilities: 2014,
D. M. Taylor, “Americans with disabilities: 2014,”US Census Bureau
2014
-
[4]
Autonomy in rehabilitation robotics: An intersection,
B. D. Argall, “Autonomy in rehabilitation robotics: An intersection,” Annual Review of Control, Robotics, and Autonomous Systems, 2018
2018
-
[5]
Recursive bayesian human intent recognition in shared-control robotics,
S. Jain and B. Argall, “Recursive bayesian human intent recognition in shared-control robotics,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 3905–3912
2018
-
[6]
Human-robot mutual adaptation in shared autonomy,
S. Nikolaidis, Y . X. Zhu, D. Hsu, and S. Srinivasa, “Human-robot mutual adaptation in shared autonomy,” inProceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction
2017
-
[7]
A human–robot interaction perspective on assistive and rehabilitation robotics,
P. Beckerle, G. Salvietti, R. Unal, D. Prattichizzo, S. Rossi, C. Castellini, S. Hirche, S. Endo, H. B. Amor, M. Ciocarlieet al., “A human–robot interaction perspective on assistive and rehabilitation robotics,”Frontiers in neurorobotics, vol. 11, p. 24, 2017
2017
-
[8]
Collaborative control for a robotic wheelchair: evaluation of performance, attention, and workload,
T. Carlson and Y . Demiris, “Collaborative control for a robotic wheelchair: evaluation of performance, attention, and workload,”IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics)
-
[9]
Intuitive hand teleopera- tion by novice operators using a continuous teleoperation subspace,
C. Meeker, T. Rasmussen, and M. Ciocarlie, “Intuitive hand teleopera- tion by novice operators using a continuous teleoperation subspace,” in International Conference on Robotics and Automation (ICRA). IEEE
-
[10]
Shared autonomy with learned latent actions,
H. J. Jeon, D. P. Losey, and D. Sadigh, “Shared autonomy with learned latent actions,”arXiv preprint arXiv:2005.03210, 2020
arXiv 2005
-
[11]
Toward zero-shot user intent recognition in shared autonomy,
A. Belsare, Z. Karimi, C. Mattson, and D. S. Brown, “Toward zero-shot user intent recognition in shared autonomy,” in2025 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI). IEEE, 2025, pp. 222–231
2025
-
[12]
Trust in automation: Designing for appropriate reliance,
J. D. Lee and K. A. See, “Trust in automation: Designing for appropriate reliance,”Human factors, vol. 46, no. 1, pp. 50–80, 2004
2004
-
[13]
Human perfor- mance consequences of stages and levels of automation: An integrated meta-analysis,
L. Onnasch, C. D. Wickens, H. Li, and D. Manzey, “Human perfor- mance consequences of stages and levels of automation: An integrated meta-analysis,”Human factors, vol. 56, no. 3, pp. 476–488, 2014
2014
-
[14]
Formalizing assistive teleopera- tion
A. D. Dragan and S. S. Srinivasa, “Formalizing assistive teleopera- tion.” inRobotics: Science and Systems. Sydney, Australia, 2012
2012
-
[15]
Shared autonomy in assistive mobile robots: a review,
S. Udupa, V . R. Kamat, and C. C. Menassa, “Shared autonomy in assistive mobile robots: a review,”Disability and Rehabilitation: Assistive Technology, vol. 18, no. 6, pp. 827–848, 2023
2023
-
[16]
Verbalization: Narration of autonomous robot experience
S. Rosenthal, S. P. Selvaraj, and M. M. Veloso, “Verbalization: Narration of autonomous robot experience.” inIJCAI, vol. 16, 2016
2016
-
[17]
Who should i blame? effects of autonomy and transparency on attributions in human-robot interaction,
T. Kim and P. Hinds, “Who should i blame? effects of autonomy and transparency on attributions in human-robot interaction,” inROMAN 2006-The 15th IEEE international symposium on robot and human interactive communication. IEEE, 2006, pp. 80–85
2006
-
[18]
A proposed approach for determining the influence of multimodal robot-of-human transparency information on human-agent teams,
S. Lakhmani, J. Abich IV , D. Barber, and J. Chen, “A proposed approach for determining the influence of multimodal robot-of-human transparency information on human-agent teams,” inInternational Conference on Augmented Cognition. Springer, 2016, pp. 296–307
2016
-
[19]
System transparency in shared autonomy: A mini review,
V . Alonso and P. De La Puente, “System transparency in shared autonomy: A mini review,”Frontiers in neurorobotics, vol. 12, p. 83
-
[20]
Legibility and predictability of robot motion,
A. D. Dragan, K. C. Lee, and S. S. Srinivasa, “Legibility and predictability of robot motion,” in2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI). IEEE, 2013
2013
-
[21]
Effects of robot motion on human-robot collaboration,
A. D. Dragan, S. Bauman, J. Forlizzi, and S. S. Srinivasa, “Effects of robot motion on human-robot collaboration,” inProceedings of the tenth annual ACM/IEEE international conference on human-robot interaction, 2015, pp. 51–58
2015
-
[22]
Situation awareness-based agent transparency,
J. Y . Chen, K. Procci, M. Boyce, J. L. Wright, A. Garcia, and M. Barnes, “Situation awareness-based agent transparency,” 2014
2014
-
[23]
Designing and implementing transparency for real time inspection of autonomous robots,
A. Theodorou, R. H. Wortham, and J. J. Bryson, “Designing and implementing transparency for real time inspection of autonomous robots,”Connection Science, vol. 29, no. 3, pp. 230–241, 2017
2017
-
[24]
Robot trans- parency: Improving understanding of intelligent behaviour for design- ers and users,
R. H. Wortham, A. Theodorou, and J. J. Bryson, “Robot trans- parency: Improving understanding of intelligent behaviour for design- ers and users,” inConference Towards Autonomous Robotic Systems. Springer, 2017, pp. 274–289
2017
-
[25]
A literature survey of how to convey transparency in co-located human–robot interaction,
S. Y . Sch ¨ott, R. M. Amin, and A. Butz, “A literature survey of how to convey transparency in co-located human–robot interaction,” Multimodal Technologies and Interaction, vol. 7, no. 3, p. 25, 2023
2023
-
[26]
Aligning learning with communication in shared autonomy,
J. Hoegerman, S. Sagheb, B. A. Christie, and D. P. Losey, “Aligning learning with communication in shared autonomy,” 2024
2024
-
[27]
Communicating inferred goals with passive augmented reality and active haptic feedback,
J. F. Mullen, J. Mosier, S. Chakrabarti, A. Chen, T. White, and D. P. Losey, “Communicating inferred goals with passive augmented reality and active haptic feedback,”IEEE Robotics and Automation Letters
-
[28]
Visualization of intended assistance for acceptance of shared control,
C. Brooks and D. Szafir, “Visualization of intended assistance for acceptance of shared control,” 2020
2020
-
[29]
Towards explainable shared control using augmented reality,
M. Zolotas and Y . Demiris, “Towards explainable shared control using augmented reality,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 3020–3026
2019
-
[30]
Head-mounted augmented re- ality for explainable robotic wheelchair assistance,
M. Zolotas, J. Elsdon, and Y . Demiris, “Head-mounted augmented re- ality for explainable robotic wheelchair assistance,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
-
[31]
Haptic feedback improves human-robot agreement and user satisfaction in shared-autonomy teleoperation,
D. Zhang, R. Tron, and R. P. Khurshid, “Haptic feedback improves human-robot agreement and user satisfaction in shared-autonomy teleoperation,” in2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 3306–3312
2021
-
[32]
Probabilistic vs linear blending approaches to shared control for wheelchair driving,
C. Ezeh, P. Trautman, L. Devigne, V . Bureau, M. Babel, and T. Carl- son, “Probabilistic vs linear blending approaches to shared control for wheelchair driving,” in2017 International Conference on Rehabilita- tion Robotics (ICORR). IEEE, 2017, pp. 835–840
2017
-
[33]
Improving robot controller transparency through autonomous policy explanation,
B. Hayes and J. A. Shah, “Improving robot controller transparency through autonomous policy explanation,” inProceedings of the 2017 ACM/IEEE international conference on human-robot interaction
2017
-
[34]
Ultralytics yolo11,
G. Jocher and J. Qiu, “Ultralytics yolo11,” 2024. [Online]. Available: https://github.com/ultralytics/ultralytics
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.