Static and Dynamic Representations for Tactile Contact-Angle Estimation with Event-Based Sensors
Pith reviewed 2026-06-28 10:04 UTC · model grok-4.3
The pith
The static event contour representation estimates contact angles from NeuroTac sensor streams more accurately than dynamic or combined alternatives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
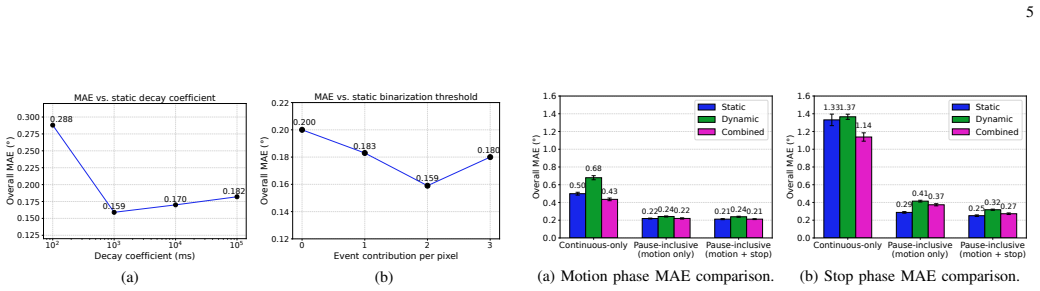
Across tested rolling and interrupted-motion scenarios, the static representation achieves a mean overall MAE of 0.160° during continuous sensor rolling and a stop-phase mean MAE of 0.251° during randomly inserted motion interruptions, while also showing smaller performance changes when speed and indentation depth vary.
What carries the argument
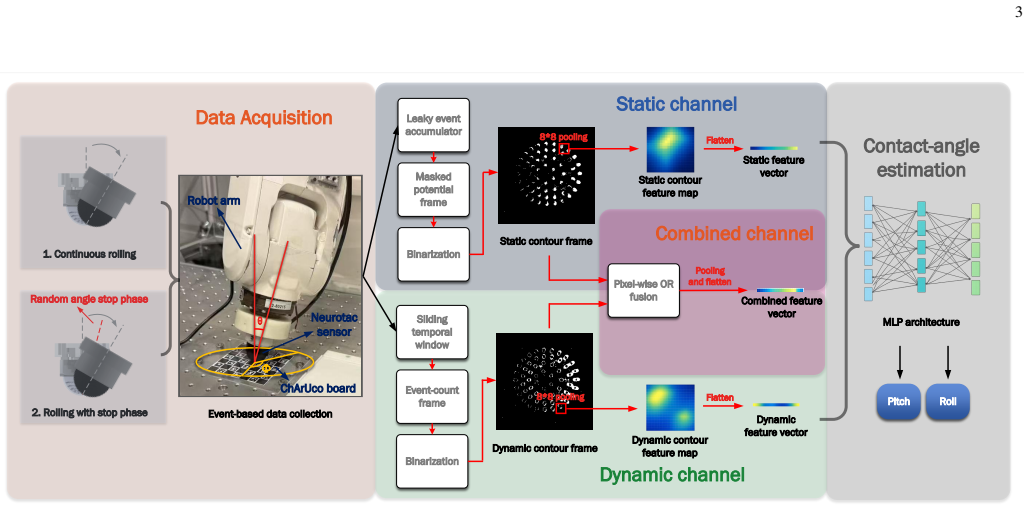
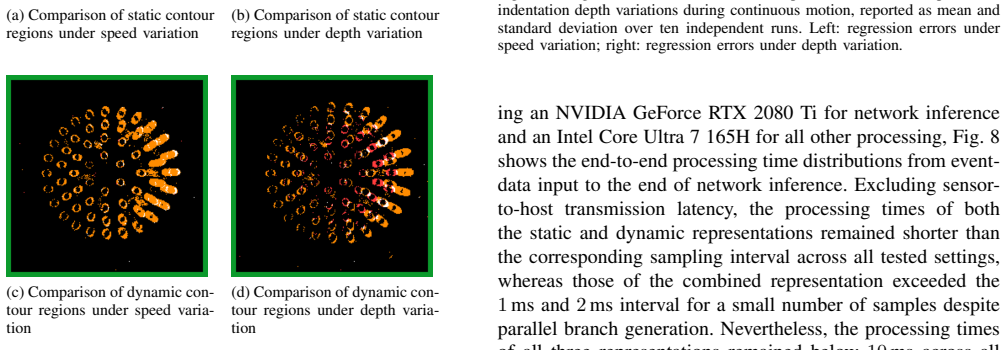
The static spatial contour representation that recovers a persistent contact state from the event stream, as opposed to the dynamic representation of recent activity or their combination.
If this is right
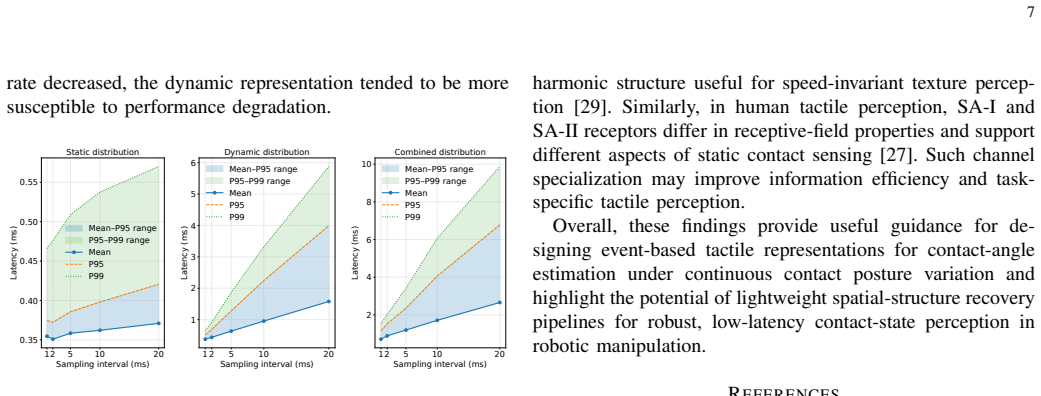
- All three representation pipelines keep P99 processing latency below 10 ms at the tested sampling intervals.
- Scenario-specific training lets the static pipeline deliver the reported MAE values and reduced sensitivity to speed and depth changes.
- The low latency supports high-frequency tactile feedback loops in robotic manipulation.
- The static representation's smaller fluctuations across parameter variations imply more consistent behavior when grasp conditions change.
Where Pith is reading between the lines
- If the static representation's advantage holds on other event-based tactile sensors, it could simplify sensor choice for angle-aware control.
- The reported stop-phase error of 0.251° suggests the method might still support brief pauses in manipulation without retraining.
- Extending the same contour extraction to multi-contact or curved surfaces would test whether the static approach scales beyond single-point rolling.
Load-bearing premise
The chosen rolling and interruption scenarios, together with the tested speed and indentation variations, produce performance numbers that generalize to other contact-rich robotic tasks with the NeuroTac sensor.
What would settle it
A direct comparison of the three representations on the same sensor but with untrained motion patterns, such as lateral sliding or object rotation not seen during training, would show whether the static advantage disappears.
Figures

read the original abstract
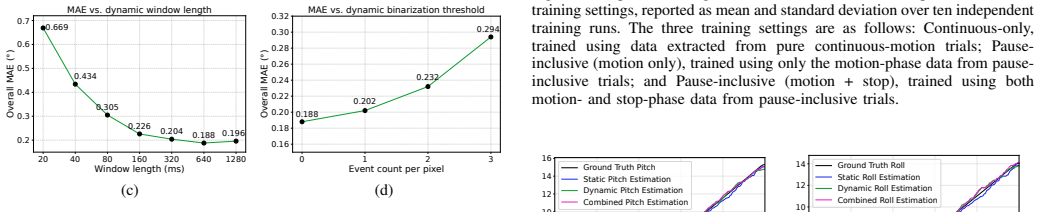
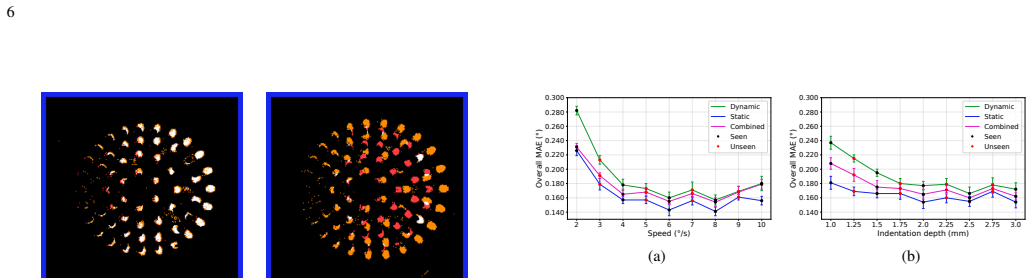
Event-based tactile sensing offers low-latency signal acquisition for contact-rich robotic interaction. This paper investigates contact-angle estimation using event streams from an event-based tactile sensor (NeuroTac) and compares three event-derived spatial contour representations: a dynamic representation capturing recent event activity, a static representation recovering a more persistent contact state, and their combined representation. Across the evaluated motion scenarios, all representation pipelines exhibited P99 processing latency below 10 ms at all tested sampling intervals, demonstrating their potential for high-frequency event-based tactile angle estimation in robotic manipulation. The static representation consistently achieved marginally better performance than the dynamic and combined representations under scenario-specific training, yielding a mean overall MAE of 0.160{\deg} during continuous sensor rolling and a stop-phase mean MAE of 0.251{\deg} during randomly inserted motion interruptions. It also exhibited smaller performance fluctuations across speed and indentation depth variations than the other two representations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper investigates contact-angle estimation from event streams of the NeuroTac event-based tactile sensor by comparing three spatial contour representations: dynamic (recent events), static (persistent contact state), and their combination. It reports that all pipelines achieve P99 processing latency below 10 ms, with the static representation performing marginally better under scenario-specific training, achieving mean MAE of 0.160° in continuous rolling and 0.251° in stop phases during motion interruptions, and showing smaller fluctuations across speed and indentation depth variations.
Significance. If the experimental results are supported by adequate statistical analysis and documentation of methodology, this work demonstrates the potential of event-based tactile sensors for high-frequency, low-latency contact angle estimation in robotic applications. The comparison highlights the advantages of static representations for robustness in varying conditions.
major comments (1)
- [Abstract] The abstract reports specific MAE values (0.160° and 0.251°) and latency bounds but provides no information on the number of trials, statistical tests, error bars, data exclusion rules, or how ground-truth angles were obtained. Full details in the methods and results sections are required to verify support for these performance claims.
Simulated Author's Rebuttal
We thank the referee for their review and constructive feedback on our manuscript. We address the major comment below and indicate where revisions will be made.
read point-by-point responses
-
Referee: [Abstract] The abstract reports specific MAE values (0.160° and 0.251°) and latency bounds but provides no information on the number of trials, statistical tests, error bars, data exclusion rules, or how ground-truth angles were obtained. Full details in the methods and results sections are required to verify support for these performance claims.
Authors: We agree that abstracts are necessarily concise and that transparency requires clear methodological documentation. The Methods section of the manuscript fully describes the experimental protocol, including the procedure for obtaining ground-truth contact angles via the robotic positioning system, the total number of trials and repetitions across speed and depth conditions, data collection and preprocessing steps (with no exclusions applied), and the computation of MAE. The Results section reports the mean MAE values together with measures of variability across conditions. To further strengthen the abstract's self-containment, we will add a brief clause noting that the reported figures derive from repeated trials under controlled motion scenarios, with complete experimental details provided in the Methods section. revision: yes
Circularity Check
No significant circularity
full rationale
The paper is a purely empirical study comparing three event-derived spatial contour representations (dynamic, static, combined) for contact-angle estimation on the NeuroTac sensor. It reports measured MAE values (e.g., 0.160° overall, 0.251° stop-phase) and latency bounds directly from experimental trials under defined motion scenarios, speeds, and indentation depths. No equations, derivations, fitted parameters renamed as predictions, or self-citations appear in the load-bearing claims. The central results are scoped experimental outcomes, not reductions to inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The sensory neurons of touch,
V . E. Abraira and D. D. Ginty, “The sensory neurons of touch,”neuron, vol. 79, no. 4, pp. 618–639, 2013
2013
-
[2]
A review of the neurobiomechanical processes underlying secure gripping in object manipulation,
H. O’Shea and S. J. Redmond, “A review of the neurobiomechanical processes underlying secure gripping in object manipulation,”Neuro- science & Biobehavioral Reviews, vol. 123, pp. 286–300, 2021
2021
-
[3]
Neurotac: A neuro- morphic optical tactile sensor applied to texture recognition,
B. Ward-Cherrier, N. Pestell, and N. F. Lepora, “Neurotac: A neuro- morphic optical tactile sensor applied to texture recognition,” inIEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 2654–2660
2020
-
[4]
Evetac: An event-based optical tactile sensor for robotic manipulation,
N. Funk, E. Helmut, G. Chalvatzaki, R. Calandra, and J. Peters, “Evetac: An event-based optical tactile sensor for robotic manipulation,”IEEE Transactions on Robotics, vol. 40, pp. 3812–3832, 2024
2024
-
[5]
Recent event camera innovations: A survey,
B. Chakravarthi, A. A. Verma, K. Daniilidis, C. Fermuller, and Y . Yang, “Recent event camera innovations: A survey,” inEuropean conference on computer vision. Springer, 2024, pp. 342–376
2024
-
[6]
Real-time grasping strategies using event camera,
X. Huang, M. Halwani, R. Muthusamyet al., “Real-time grasping strategies using event camera,”Journal of Intelligent Manufacturing, vol. 33, no. 2, pp. 593–615, 2022
2022
-
[7]
A neuromorphic incipient slip detection system using papillae morphology,
Y . Lu, Z. Deng, S. J. Redmond, E. Psomopoulou, and B. Ward- Cherrier, “A neuromorphic incipient slip detection system using papillae morphology,”IEEE Robotics and Automation Letters, 2026
2026
-
[8]
A neuromorphic system for the real-time classification of natural textures,
G. Brayshaw, B. Ward-Cherrier, and M. J. Pearson, “A neuromorphic system for the real-time classification of natural textures,” inIEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 1070–1076
2024
-
[9]
Merkel cells and neurons keep in touch,
S.-H. Woo, E. A. Lumpkin, and A. Patapoutian, “Merkel cells and neurons keep in touch,”Trends in cell biology, vol. 25, no. 2, pp. 74–81, 2015
2015
-
[10]
Slowly adapting mechanoreceptors in the borders of the human fingernail encode fingertip forces,
I. Birznieks, V . G. Macefield, G. Westling, and R. S. Johansson, “Slowly adapting mechanoreceptors in the borders of the human fingernail encode fingertip forces,”Journal of Neuroscience, vol. 29, no. 29, pp. 9370–9379, 2009
2009
-
[11]
Slowly-adapting type ii afferents con- tribute to conscious touch sensation in humans: Evidence from single unit intraneural microstimulation,
R. H. Watkins, M. Durao de Carvalho Amante, H. Backlund Wasling, J. Wessberg, and R. Ackerley, “Slowly-adapting type ii afferents con- tribute to conscious touch sensation in humans: Evidence from single unit intraneural microstimulation,”The Journal of Physiology, vol. 600, no. 12, pp. 2939–2952, 2022
2022
-
[12]
Learning robot in-hand manipulation with tactile features. in 2015 ieee-ras 15th international conference on humanoid robots (humanoids),
H. Van Hoof, T. Hermans, G. Neumann, and J. Peters, “Learning robot in-hand manipulation with tactile features. in 2015 ieee-ras 15th international conference on humanoid robots (humanoids),”Seoul, Korea (South), pp. 121–127, 2015
2015
-
[13]
Tactile dexterity: Manipulation primitives with tactile feedback,
F. R. Hogan, J. Ballester, S. Dong, and A. Rodriguez, “Tactile dexterity: Manipulation primitives with tactile feedback,” inIEEE international conference on robotics and automation (ICRA), 2020, pp. 8863–8869
2020
-
[14]
Tactile pose feedback for closed-loop manipulation tasks,
K. Ota, S. Jain, M. Zhang, and D. K. Jha, “Tactile pose feedback for closed-loop manipulation tasks,” inRobotics: Science and Systems workshop, 2023
2023
-
[15]
Real-time fault detection in robotic manufacturing using high-bandwidth event vision-based tactile sensing,
E. Sherif, A. Khairi, H. Sajwaniet al., “Real-time fault detection in robotic manufacturing using high-bandwidth event vision-based tactile sensing,”Sensors International, p. 100355, 2025
2025
-
[16]
Events-to-video: Bringing modern computer vision to event cameras,
H. Rebecq, R. Ranftl, V . Koltun, and D. Scaramuzza, “Events-to-video: Bringing modern computer vision to event cameras,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 3857–3866
2019
-
[17]
Back to event basics: Self- supervised learning of image reconstruction for event cameras via photometric constancy,
F. Paredes-Vall ´es and G. C. De Croon, “Back to event basics: Self- supervised learning of image reconstruction for event cameras via photometric constancy,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 3446–3455. 8
2021
-
[18]
Learning event guided high dynamic range video reconstruction,
Y . Yang, J. Han, J. Liang, I. Sato, and B. Shi, “Learning event guided high dynamic range video reconstruction,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 13 924–13 934
2023
-
[19]
Lifetime estimation of events from dynamic vision sensors,
E. Mueggler, C. Forster, N. Baumli, G. Gallego, and D. Scaramuzza, “Lifetime estimation of events from dynamic vision sensors,” inIEEE international conference on Robotics and Automation (ICRA), 2015, pp. 4874–4881
2015
-
[20]
Hots: a hierarchy of event-based time-surfaces for pattern recognition,
X. Lagorce, G. Orchard, F. Galluppi, B. E. Shi, and R. B. Benosman, “Hots: a hierarchy of event-based time-surfaces for pattern recognition,” IEEE transactions on pattern analysis and machine intelligence, vol. 39, no. 7, pp. 1346–1359, 2016
2016
-
[21]
Continuous-time intensity estimation using event cameras,
C. Scheerlinck, N. Barnes, and R. Mahony, “Continuous-time intensity estimation using event cameras,” inAsian Conference on Computer Vision. Springer, 2018, pp. 308–324
2018
-
[22]
Elastomer-based visuotactile sensor for normality of robotic manufacturing systems,
I. M. Zaid, M. Halwani, A. Ayyadet al., “Elastomer-based visuotactile sensor for normality of robotic manufacturing systems,”Polymers, vol. 14, no. 23, p. 5097, 2022
2022
-
[23]
A novel vision-based multi- functional sensor for normality and position measurements in precise robotic manufacturing,
M. Halwani, A. Ayyad, L. AbuAssiet al., “A novel vision-based multi- functional sensor for normality and position measurements in precise robotic manufacturing,”Precision Engineering, vol. 88, pp. 367–381, 2024
2024
-
[24]
Neuromorphic tactile edge orientation classification in an unsupervised spiking neural network,
F. L. Macdonald, N. F. Lepora, J. Conradt, and B. Ward-Cherrier, “Neuromorphic tactile edge orientation classification in an unsupervised spiking neural network,”Sensors, vol. 22, no. 18, p. 6998, 2022
2022
-
[25]
Tactigraph: An asynchronous graph neural network for contact angle prediction using neuromorphic vision-based tactile sensing,
H. Sajwani, A. Ayyad, Y . Alkendiet al., “Tactigraph: An asynchronous graph neural network for contact angle prediction using neuromorphic vision-based tactile sensing,”Sensors, vol. 23, no. 14, p. 6451, 2023
2023
-
[26]
High speed and high dynamic range video with an event camera,
H. Rebecq, R. Ranftl, V . Koltun, and D. Scaramuzza, “High speed and high dynamic range video with an event camera,”IEEE transactions on pattern analysis and machine intelligence, vol. 43, no. 6, pp. 1964–1980, 2019
1964
-
[27]
The roles and functions of cutaneous mechanorecep- tors,
K. O. Johnson, “The roles and functions of cutaneous mechanorecep- tors,”Current opinion in neurobiology, vol. 11, no. 4, pp. 455–461, 2001
2001
-
[28]
Population coding strategies in human tactile afferents,
G. Corniani, M. A. Casal, S. Panzeri, and H. P. Saal, “Population coding strategies in human tactile afferents,”PLOS Computational Biology, vol. 18, no. 12, p. e1010763, 2022
2022
-
[29]
Artificial sa-i, ra-i and ra-ii/vibrotactile afferents for tactile sensing of texture,
N. Pestell and N. F. Lepora, “Artificial sa-i, ra-i and ra-ii/vibrotactile afferents for tactile sensing of texture,”Journal of The Royal Society Interface, vol. 19, no. 189, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.