EXACT-MPPI: Exact Signed-Distance Navigation for Arbitrary-Footprint Robots from Point Clouds via Path Integral Control
Pith reviewed 2026-06-29 06:48 UTC · model grok-4.3
The pith
EXACT-MPPI navigates robots with arbitrary non-convex footprints by computing exact signed distances from raw point clouds inside an MPPI controller.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Embedding an analytic exact signed-distance evaluator between observed obstacle points and a polygonal robot footprint directly inside Model Predictive Path Integral rollouts produces collision costs that respect true non-convex geometry, eliminate the need for convex proxies or occupancy grids, and support real-time control on diverse robot types without per-platform training or learned components.
What carries the argument
Analytic exact signed-distance evaluator for a simple polygon footprint, applied after transforming each observed point cloud into the predicted body frame during MPPI rollouts.
If this is right
- Robots can thread through narrow gaps whose width matches their true concave geometry instead of being blocked by convex inflation.
- The same controller code deploys on differential-drive, Ackermann, omnidirectional, and hybrid platforms by supplying only a new polygon and dynamics model.
- Batched GPU evaluation of the exact distance function runs faster than a learned point-to-robot baseline while remaining robust to dense static and moving obstacles.
- No intermediate occupancy grid or distance field is required, so memory and update latency stay low in cluttered scenes.
Where Pith is reading between the lines
- The approach could be paired with a global planner that also reasons about exact footprints to produce end-to-end paths that do not require local replanning around inflated obstacles.
- Extending the polygon evaluator to include time-varying or articulated attachments would allow the same framework to handle robots whose shape changes during a task.
- Because the cost is analytic, one could add explicit clearance margins or velocity-dependent safety buffers by simple offset operations on the same polygon without retraining.
Load-bearing premise
Transforming observed obstacle points into each predicted body frame and evaluating them against the polygon footprint produces collision costs that remain complete and free of false positives or missed contacts under realistic sensor noise and prediction error.
What would settle it
A recorded run in which the robot either collides with an obstacle the method declared safe or loses a feasible path the method declared blocked, when the input point cloud contains only realistic sensor noise levels and the prediction horizon matches the controller's.
Figures








read the original abstract
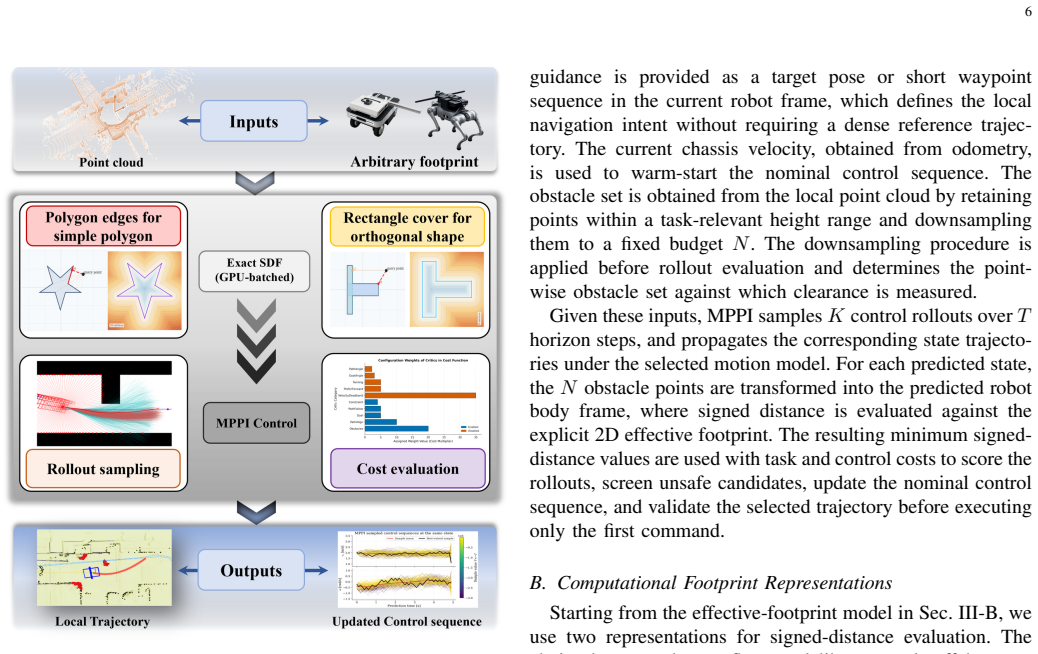
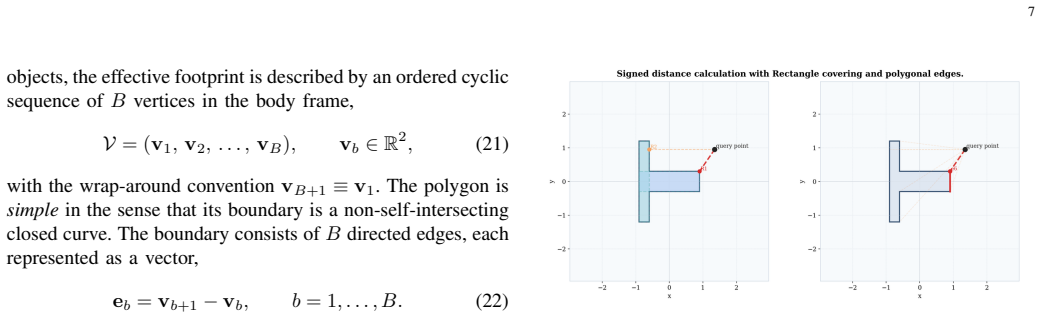
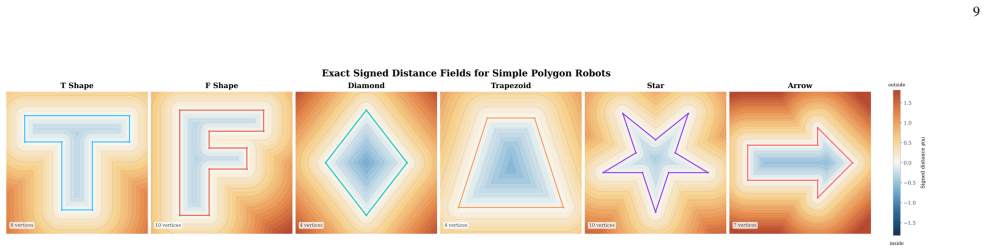
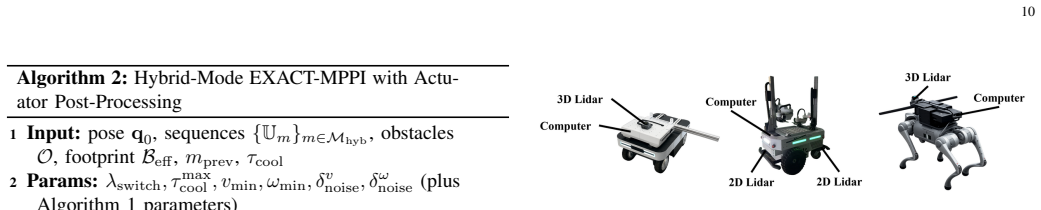
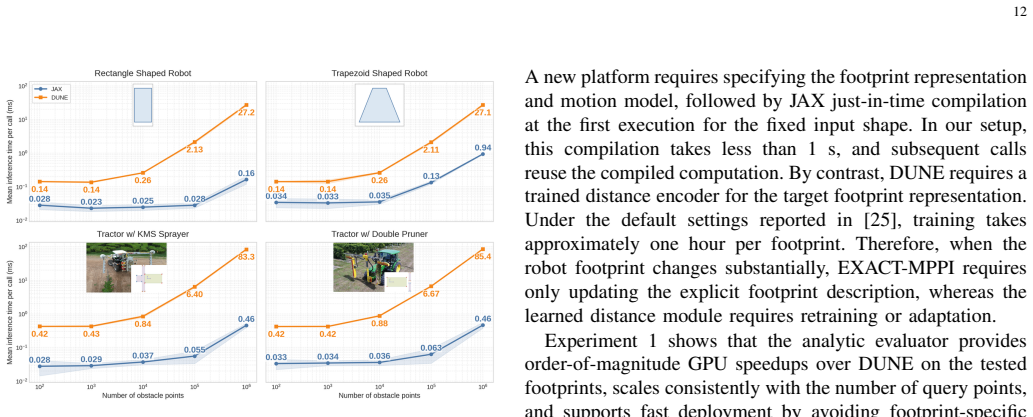
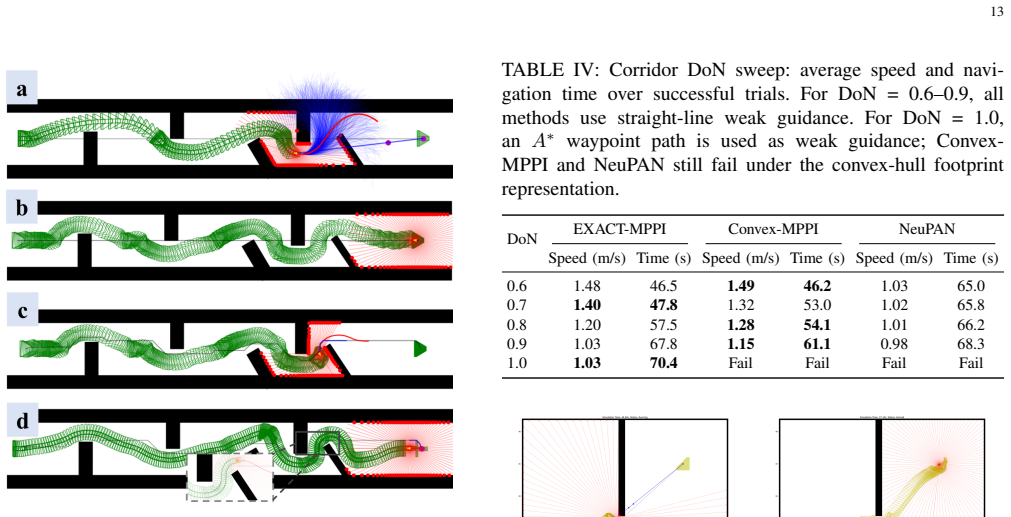
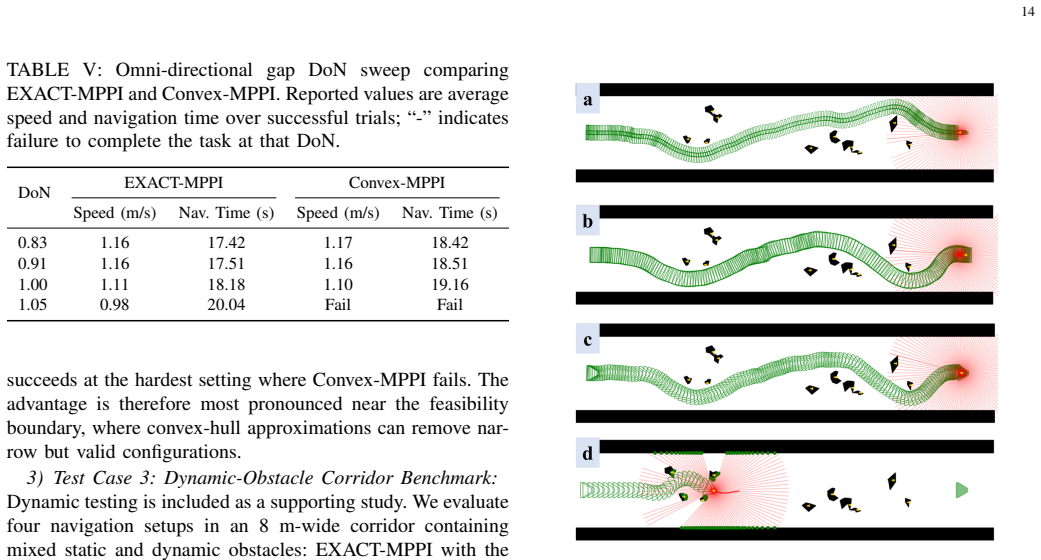
Ground robots often carry payloads, implements, or other attachments that turn their effective footprint into complex, non-convex shapes. Navigating safely through clutter then requires reasoning about this true geometry, yet most local planners simplify it with convex or inflated proxies and rasterize sensor data into occupancy grids or distance fields. Both choices eliminate feasible motions when clearance is comparable to the footprint geometry. We present EXACT-MPPI, a training-free local navigation framework that maps local point-cloud observations and sparse guidance directly to motion commands, without any intermediate map representation. The framework embeds an analytic, exact signed-distance evaluator into a Model Predictive Path Integral (MPPI) controller. The footprint is represented as a simple polygon for general convex or concave planar shapes, with a rectangle-cover specialization for faster evaluation of rectilinear footprints, enabling footprint-aware collision costs without convex decomposition, inflation, or learned encoders. During each MPPI rollout, observed obstacle points are transformed into the predicted body frame and evaluated against the footprint. All operations are batched in JAX, leveraging GPU parallelism for real-time receding-horizon control. Experiments show that EXACT-MPPI accelerates batched distance evaluation over a learned point-to-robot baseline, preserves feasible motion where convex-footprint planners fail, and remains robust under dense static and moving obstacles. The same framework deploys on differential-drive, Ackermann, omnidirectional, and hybrid-mode platforms by changing only the footprint description and motion model without per-platform training. Pairing exact footprint geometry with sampling-based predictive control thus offers a practical, training-free path to footprint-aware local navigation across diverse robots.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents EXACT-MPPI, a training-free MPPI-based local planner that embeds an analytic signed-distance evaluator for arbitrary (convex or concave) polygonal robot footprints. Observed point-cloud points are transformed into each predicted body frame during rollouts and evaluated directly against the polygon to produce collision costs; a rectangle-cover specialization accelerates rectilinear cases. The framework operates without maps, inflation, convex decomposition, or learned encoders, supports differential-drive/Ackermann/omnidirectional platforms by swapping only the footprint and dynamics, and is implemented in batched JAX for GPU execution.
Significance. If the central claims hold, the work supplies a practical route to footprint-aware navigation that avoids the feasible-motion loss induced by convex proxies or grid approximations when clearance is comparable to geometry. Explicit strengths include the absence of training, the modular platform deployment, and the GPU-batched exact evaluator that removes the need for learned point-to-robot distance models.
major comments (2)
- [Abstract / method (point-to-footprint evaluation)] Abstract and method description (point transformation paragraph): the collision cost is computed solely from the finite set of observed points after rigid transformation into the predicted body frame. No analysis, bound, or experiment addresses the completeness gap between the discrete point set and the continuous obstacle surface; unsampled surface patches can intersect the footprint without registering negative distance, undermining the robustness and feasibility-preservation claims under realistic sensor sparsity or occlusion.
- [Abstract] Abstract experimental claims: acceleration of batched distance evaluation, preservation of feasible motions where convex planners fail, and robustness under dense static/moving obstacles are asserted without any reported quantitative metrics, baseline descriptions, statistical tests, sensor-noise models, or implementation parameters (rollout count, horizon, cost weights). These performance assertions cannot be verified from the supplied text and are load-bearing for the central contribution.
minor comments (2)
- [Method] Notation for the signed-distance function and polygon representation should be introduced with explicit equations rather than prose description only.
- [Implementation] The rectangle-cover specialization is mentioned for speed; a short complexity comparison or timing table versus the general polygon case would clarify the practical benefit.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting two important aspects of our work: the reliance on discrete point observations and the need for verifiable experimental claims in the abstract. We address each comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract / method (point-to-footprint evaluation)] Abstract and method description (point transformation paragraph): the collision cost is computed solely from the finite set of observed points after rigid transformation into the predicted body frame. No analysis, bound, or experiment addresses the completeness gap between the discrete point set and the continuous obstacle surface; unsampled surface patches can intersect the footprint without registering negative distance, undermining the robustness and feasibility-preservation claims under realistic sensor sparsity or occlusion.
Authors: We agree this is a substantive limitation of any point-cloud-based collision checker that does not perform surface reconstruction. The current formulation evaluates only the observed points and therefore cannot guarantee detection of unsampled surface patches. The manuscript implicitly assumes sufficiently dense local observations (typical of modern LiDAR or RGB-D sensors at short range), but does not state this assumption or discuss failure modes. We will add an explicit paragraph in the method section stating the sensor-density assumption, note the potential for missed intersections under extreme sparsity or heavy occlusion, and suggest conservative footprint inflation or multi-frame fusion as practical mitigations. No new theoretical bound will be derived, as that would require additional analysis beyond the scope of the present contribution. revision: yes
-
Referee: [Abstract] Abstract experimental claims: acceleration of batched distance evaluation, preservation of feasible motions where convex planners fail, and robustness under dense static/moving obstacles are asserted without any reported quantitative metrics, baseline descriptions, statistical tests, sensor-noise models, or implementation parameters (rollout count, horizon, cost weights). These performance assertions cannot be verified from the supplied text and are load-bearing for the central contribution.
Authors: The abstract is written as a concise summary; the quantitative results, baseline comparisons, implementation parameters (rollout count, horizon, cost weights), and evaluation protocol appear in the Experiments section of the full manuscript. We acknowledge that the abstract claims are not self-contained. We will revise the abstract to include the key reported metrics (e.g., observed speedup factors and success-rate differences) and will add a short sentence directing readers to the experimental section for full details, baselines, and statistical information. revision: yes
Circularity Check
No circularity in derivation or claims
full rationale
The paper describes a training-free algorithmic framework that directly embeds an analytic polygon signed-distance evaluator into batched MPPI rollouts on transformed point clouds. No equations, performance metrics, or central claims are shown to reduce by construction to fitted parameters, self-referential normalizations, or self-citation chains. Experimental results (acceleration over learned baselines, feasibility preservation) are presented as empirical outcomes rather than quantities defined from the method's own inputs. The framework's independence from learned encoders or grid maps further keeps the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Signed-distance functions for simple polygons can be evaluated analytically in closed form
- domain assumption Local point-cloud observations contain sufficient information to evaluate collision risk for short-horizon planning
Reference graph
Works this paper leans on
-
[1]
Robotic forklifts for intelligent warehouses: Routing, path planning, and auto-localization,
K. C. Vivaldini, J. P. Galdames, T. S. Bueno, R. C. Araujo, R. M. Sobral, M. Becker, and G. A. Caurin, “Robotic forklifts for intelligent warehouses: Routing, path planning, and auto-localization,” in2010 IEEE International Conference on Industrial Technology. IEEE, 2010, pp. 1463–1468. 19 Fig. 18: Hybrid-mode navigation on AgileX Ranger mini. The full tr...
2010
-
[2]
Optimization- based motion planning for autonomous agricultural vehicles turning in constrained headlands,
C. Peng, P. Wei, Z. Fei, Y . Zhu, and S. G. V ougioukas, “Optimization- based motion planning for autonomous agricultural vehicles turning in constrained headlands,”Journal of Field Robotics, vol. 41, no. 6, pp. 1984–2008, 2024
1984
-
[3]
Payload-aware trajectory optimisa- tion for non-holonomic mobile multi-robot manipulation with tip-over avoidance,
F. Kennel-Maushart and S. Coros, “Payload-aware trajectory optimisa- tion for non-holonomic mobile multi-robot manipulation with tip-over avoidance,”IEEE Robotics and Automation Letters, vol. 9, no. 9, pp. 7669–7676, 2024
2024
-
[4]
Model predictive path integral control: From theory to parallel computation,
G. Williams, A. Aldrich, and E. A. Theodorou, “Model predictive path integral control: From theory to parallel computation,”Journal of Guidance, Control, and Dynamics, vol. 40, no. 2, pp. 344–357, 2017
2017
-
[5]
JAX: composable transformations of Python+NumPy programs,
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman- Milne, and Q. Zhang, “JAX: composable transformations of Python+NumPy programs,” GitHub repository, 2018, version 0.3.13. [Online]. Available: http://github.com/jax-ml/jax
2018
-
[6]
V oxblox: Incremental 3d euclidean signed distance fields for on-board mav planning,
H. Oleynikova, Z. Taylor, M. Fehr, R. Siegwart, and J. Nieto, “V oxblox: Incremental 3d euclidean signed distance fields for on-board mav planning,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 1366–1373
2017
-
[7]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,”The international journal of robotics research, vol. 5, no. 1, pp. 20 90–98, 1986
1986
-
[8]
The vector field histogram-fast obsta- cle avoidance for mobile robots,
J. Borenstein, Y . Korenet al., “The vector field histogram-fast obsta- cle avoidance for mobile robots,”IEEE transactions on robotics and automation, vol. 7, no. 3, pp. 278–288, 1991
1991
-
[9]
Nearness diagram (nd) navigation: collision avoidance in troublesome scenarios,
J. Minguez and L. Montano, “Nearness diagram (nd) navigation: collision avoidance in troublesome scenarios,”IEEE Transactions on Robotics and Automation, vol. 20, no. 1, pp. 45–59, 2004
2004
-
[10]
The dynamic window approach to collision avoidance,
D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,”IEEE robotics & automation magazine, vol. 4, no. 1, pp. 23–33, 1997
1997
-
[11]
Motion plan- ning for autonomous driving with a conformal spatiotemporal lattice,
M. McNaughton, C. Urmson, J. M. Dolan, and J.-W. Lee, “Motion plan- ning for autonomous driving with a conformal spatiotemporal lattice,” in 2011 IEEE international conference on robotics and automation. IEEE, 2011, pp. 4889–4895
2011
-
[12]
Falco: Fast likelihood- based collision avoidance with extension to human-guided navigation,
J. Zhang, C. Hu, R. G. Chadha, and S. Singh, “Falco: Fast likelihood- based collision avoidance with extension to human-guided navigation,” Journal of Field Robotics, vol. 37, no. 8, pp. 1300–1313, 2020
2020
-
[13]
Path planning for autonomous vehicles in unknown semi-structured environments,
D. Dolgov, S. Thrun, M. Montemerlo, and J. Diebel, “Path planning for autonomous vehicles in unknown semi-structured environments,” International Journal of Robotics Research, vol. 29, no. 5, pp. 485– 501, 2010
2010
-
[14]
Kinodynamic trajectory optimization and control for car-like robots,
C. R ¨osmann, F. Hoffmann, and T. Bertram, “Kinodynamic trajectory optimization and control for car-like robots,” in2017 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 5681–5686
2017
-
[15]
Ego-planner: An esdf- free gradient-based local planner for quadrotors,
X. Zhou, Z. Wang, H. Ye, C. Xu, and F. Gao, “Ego-planner: An esdf- free gradient-based local planner for quadrotors,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 478–485, 2020
2020
-
[16]
Epsilon: An efficient planning system for automated vehicles in highly interactive environments,
W. Ding, L. Zhang, J. Chen, and S. Shen, “Epsilon: An efficient planning system for automated vehicles in highly interactive environments,”IEEE Transactions on Robotics, vol. 38, no. 2, pp. 1118–1138, 2021
2021
-
[17]
An efficient spatial-temporal trajectory planner for autonomous vehicles in unstructured environments,
Z. Han, Y . Wu, T. Li, L. Zhang, L. Pei, L. Xu, C. Li, C. Ma, C. Xu, S. Shenet al., “An efficient spatial-temporal trajectory planner for autonomous vehicles in unstructured environments,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 2, pp. 1797–1814, 2023
2023
-
[18]
Efficient swept volume-based trajectory generation for arbitrary-shaped ground robot navigation,
Y . Li, L. Yin, Y . Cai, J. Liu, F. Zhu, M. Ma, S. Liang, H. Li, and F. Zhang, “Efficient swept volume-based trajectory generation for arbitrary-shaped ground robot navigation,” in2025 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 2076–2083
2025
-
[19]
Implicit swept volume sdf: Enabling continuous collision-free trajectory generation for arbitrary shapes,
J. Wang, T. Zhang, Q. Zhang, C. Zeng, J. Yu, C. Xu, L. Xu, and F. Gao, “Implicit swept volume sdf: Enabling continuous collision-free trajectory generation for arbitrary shapes,”ACM Transactions on Graphics (TOG), vol. 43, no. 4, pp. 1–14, 2024
2024
-
[20]
Model predictive contouring control for collision avoidance in unstructured dynamic environments,
B. Brito, B. Floor, L. Ferranti, and J. Alonso-Mora, “Model predictive contouring control for collision avoidance in unstructured dynamic environments,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4459–4466, 2019
2019
-
[21]
An nmpc approach using convex inner approximations for online motion planning with guaranteed collision avoidance,
T. Schoels, L. Palmieri, K. O. Arras, and M. Diehl, “An nmpc approach using convex inner approximations for online motion planning with guaranteed collision avoidance,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 3574–3580
2020
-
[22]
Optimization-based collision avoidance,
X. Zhang, A. Liniger, and F. Borrelli, “Optimization-based collision avoidance,”IEEE Transactions on Control Systems Technology, vol. 29, no. 3, pp. 972–983, 2020
2020
-
[23]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” in2019 18th European control conference (ECC). Ieee, 2019, pp. 3420–3431
2019
-
[24]
Learning barrier functions with memory for robust safe navigation,
K. Long, C. Qian, J. Cort ´es, and N. Atanasov, “Learning barrier functions with memory for robust safe navigation,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4931–4938, 2021
2021
-
[25]
Neupan: Direct point robot navigation with end-to-end model-based learning,
R. Han, S. Wang, S. Wang, Z. Zhang, J. Chen, S. Lin, C. Li, C. Xu, Y . C. Eldar, Q. Hao, and J. Pan, “Neupan: Direct point robot navigation with end-to-end model-based learning,”IEEE Transactions on Robotics, vol. 41, pp. 2804–2824, 2025
2025
-
[26]
Alvinn: An autonomous land vehicle in a neural network,
D. A. Pomerleau, “Alvinn: An autonomous land vehicle in a neural network,”Advances in neural information processing systems, vol. 1, 1988
1988
-
[27]
End to End Learning for Self-Driving Cars
M. Bojarski, D. Del Testa, D. Dworakowski, B. Firner, B. Flepp, P. Goyal, L. D. Jackel, M. Monfort, U. Muller, J. Zhanget al., “End to end learning for self-driving cars,”arXiv preprint arXiv:1604.07316, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[28]
End-to-end autonomous driving: Challenges and frontiers,
L. Chen, P. Wu, K. Chitta, B. Jaeger, A. Geiger, and H. Li, “End-to-end autonomous driving: Challenges and frontiers,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 46, no. 12, pp. 10 164– 10 183, 2024
2024
-
[29]
W. Zhu and M. Hayashibe, “Learn to navigate in dynamic environments with normalized LiDAR scans,” in2024 IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024, pp. 7568–7575. [Online]. Available: https://doi.org/10.1109/ ICRA57147.2024.10611247
-
[30]
Value iteration networks,
A. Tamar, Y . Wu, G. Thomas, S. Levine, and P. Abbeel, “Value iteration networks,”Advances in neural information processing systems, vol. 29, 2016
2016
-
[31]
Motion planning networks,
A. H. Qureshi, A. Simeonov, M. J. Bency, and M. C. Yip, “Motion planning networks,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 2118–2124
2019
-
[32]
Vint: A foundation model for visual navigation,
D. Shah, A. Sridhar, N. Dashora, K. Stachowicz, K. Black, N. Hirose, and S. Levine, “Vint: A foundation model for visual navigation,” in Conference on Robot Learning. PMLR, 2023, pp. 711–733
2023
-
[33]
iplanner: Imperative path planning,
F. Yang, C. Wang, C. Cadena, and M. Hutter, “iplanner: Imperative path planning,”Proceedings of Robotics: Science and System XIX, p. 064, 2023
2023
-
[34]
Neural Distance-Guided Path Integral Control for Tractor-Trailer Navigation
P. Wei, C. Peng, and S. V ougioukas, “Neural distance-guided path integral control for tractor-trailer navigation,”arXiv preprint arXiv:2605.09939, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[35]
Information-theoretic model predictive control: Theory and applications to autonomous driving,
G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou, “Information-theoretic model predictive control: Theory and applications to autonomous driving,”IEEE Transactions on Robotics, vol. 34, no. 6, pp. 1603–1622, 2018
2018
-
[36]
Aggressive driving with model predictive path integral control,
——, “Aggressive driving with model predictive path integral control,” in2016 IEEE international conference on robotics and automation (ICRA). IEEE, 2016, pp. 1433–1440
2016
-
[37]
Model predictive path integral control for agile unmanned aerial vehicles,
M. Mina ˇr´ık, R. Pˇeniˇcka, V . V on´asek, and M. Saska, “Model predictive path integral control for agile unmanned aerial vehicles,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 13 144–13 151
2024
-
[38]
Autonomous navigation of agvs in unknown cluttered environments: Log-mppi control strategy,
A. Mohamed, H. Yin, and Z. Liu, “Autonomous navigation of agvs in unknown cluttered environments: Log-mppi control strategy,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 240–10 247, 2022
2022
-
[39]
Smooth model predictive path integral control without smoothing,
T. Kim, Y . Park, S. Kwak, H. Bae, and D. Lee, “Smooth model predictive path integral control without smoothing,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 631–10 638, 2022
2022
-
[40]
The marathon 2: A navigation system,
S. Macenski, F. Martin, R. White, and J. Gin ´es Clavero, “The marathon 2: A navigation system,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
2020
-
[41]
Gnm: A general navigation model to drive any robot,
D. Shah, A. Sridhar, A. Bhorkar, N. Hirose, and S. Levine, “Gnm: A general navigation model to drive any robot,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 7226–7233
2023
-
[42]
Ranger mini 2.0 mobile robot platform,
AgileX Robotics, “Ranger mini 2.0 mobile robot platform,” https: //global.agilex.ai/products/ranger-mini, 2024, accessed: 2026-05-01
2024
-
[43]
Design and use paradigms for gazebo, an open-source multi-robot simulator,
N. Koenig and A. Howard, “Design and use paradigms for gazebo, an open-source multi-robot simulator,” in2004 IEEE/RSJ international conference on intelligent robots and systems (IROS)(IEEE Cat. No. 04CH37566), vol. 3. Ieee, 2004, pp. 2149–2154
2004
-
[44]
Real-time loop closure in 2d lidar slam,
W. Hess, D. Kohler, H. Rapp, and D. Andor, “Real-time loop closure in 2d lidar slam,” in2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2016, pp. 1271–1278
2016
-
[45]
Fast-lio2: Fast direct lidar- inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar- inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
2053
-
[46]
neupan ros,
R. Han, “neupan ros,” GitHub repository, 2026, accessed: 2026-05-11. [Online]. Available: https://github.com/hanruihua/neupan ros
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.