Simulation of Adaptive Running with Flexible Sports Prosthesis using Reinforcement Learning of Hybrid-link System
Pith reviewed 2026-05-10 18:19 UTC · model grok-4.3
The pith
A reinforcement learning system with a hybrid-link model simulates amputee running motions and shows that prosthetic stiffness changes metabolic energy cost.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a reinforcement-learning pipeline built on the hybrid-link system produces adaptive running motions for a unilateral transtibial amputee; when the same pipeline is run with different virtual stiffness values for the leaf-spring prosthesis, the computed metabolic cost of transport changes, indicating that stiffness directly influences running performance.
What carries the argument
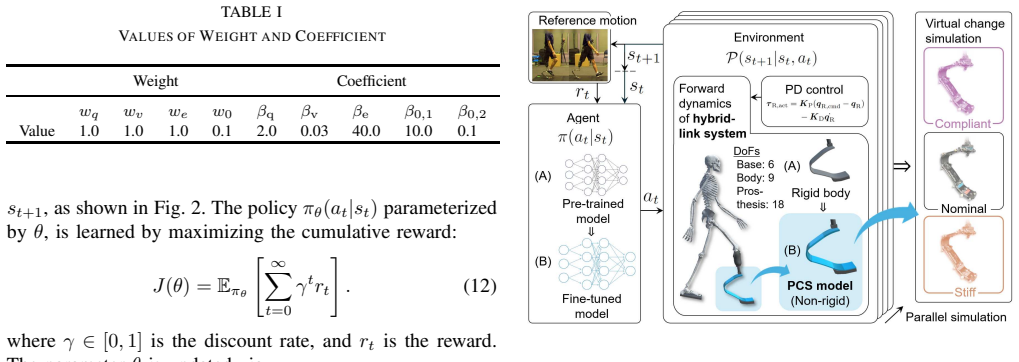
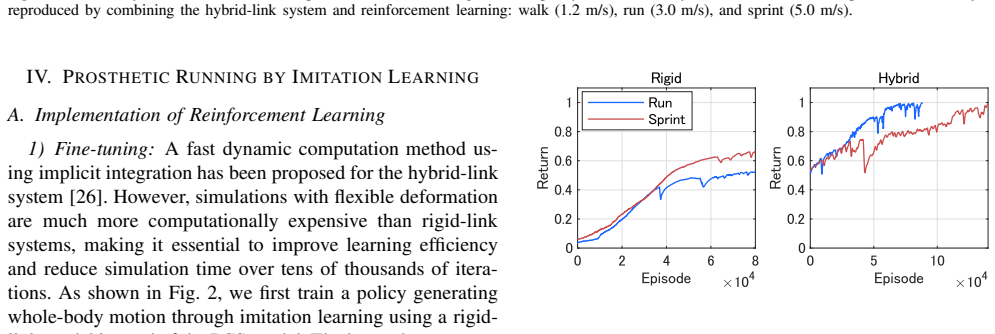
The hybrid-link system, which augments rigid-body dynamics with the Piece-wise Constant Strain model to compute continuous flexible deformation of the prosthesis while the reinforcement-learning controller generates whole-body joint torques from motion-capture imitation.
If this is right
- Varying virtual stiffness in the simulation can identify candidate stiffness values before any physical prosthesis is fabricated.
- Metabolic cost of transport becomes a quantitative output that can be compared across prosthesis designs without instrumented human trials.
- Whole-body interaction between residual-limb motion and prosthetic bending can be analyzed at every instant of the gait cycle.
- The same imitation-plus-RL pipeline can be reused to test motions that differ from the captured reference, such as faster or more asymmetric running.
- User-specific tuning becomes feasible by substituting an individual's motion-capture data into the same training loop.
Where Pith is reading between the lines
- If the simulation proves predictive, it could shorten the design cycle for sports prostheses by replacing early physical prototypes with virtual sweeps.
- The framework might be extended to other high-impact activities such as jumping or cutting, where prosthetic compliance also matters.
- Real-time control laws for powered or variable-stiffness prostheses could be pre-tuned inside the same hybrid-link environment before hardware deployment.
- The approach invites direct validation against force-plate and oxygen-consumption data collected on the same athletes whose motion was captured.
Load-bearing premise
The hybrid-link system with the Piece-wise Constant Strain model, combined with imitation learning from motion capture, produces whole-body dynamics that are sufficiently realistic to support conclusions about how real prosthetic stiffness affects metabolic cost and performance.
What would settle it
A side-by-side experiment in which actual transtibial amputee runners wearing leaf-spring prostheses of known stiffness show metabolic costs that systematically diverge from the costs predicted by the simulation under matching stiffness settings.
Figures


read the original abstract
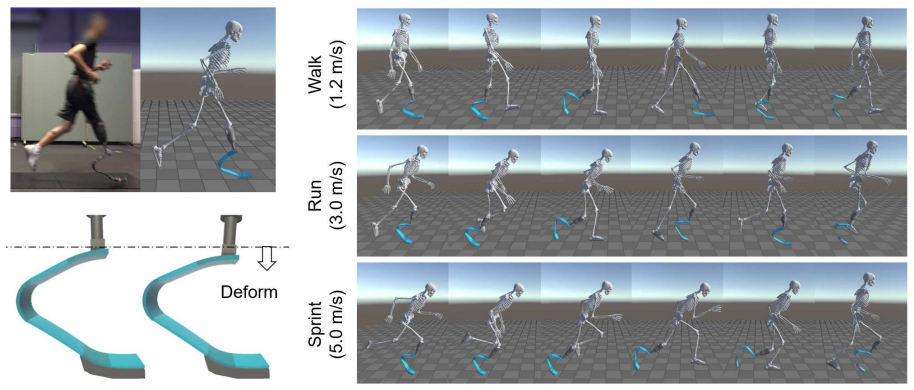
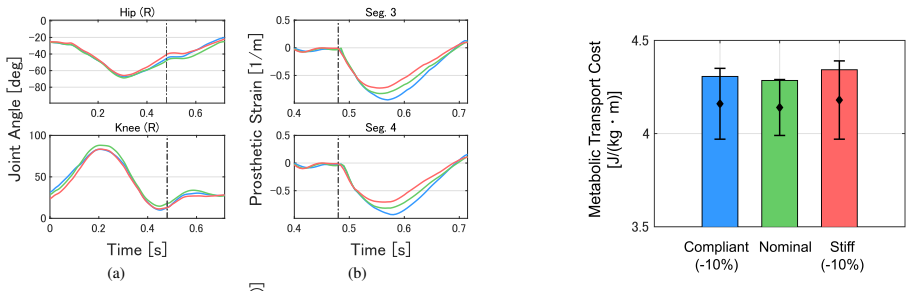
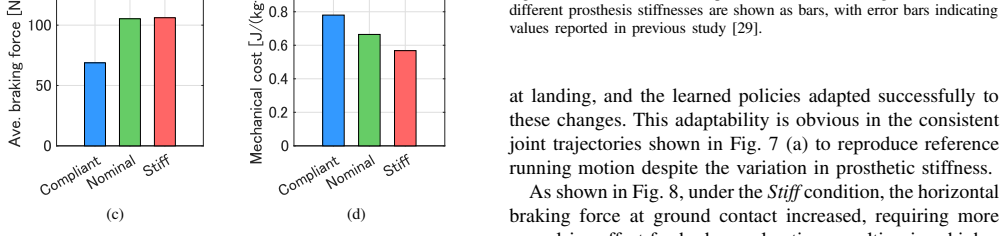
This study proposes a reinforcement learning-based framework for adaptive running motion simulation in a unilateral transtibial amputee using a hybrid-link system that incorporates the flexibility of a leaf-spring-type sports prosthesis. The design and selection of sports prostheses typically rely on trial and error. A comprehensive whole-body dynamics analysis that accounts for interactions between human motion and prosthetic deformation can provide valuable insights for user-specific design and selection. The proposed hybrid-link system enables such analysis by integrating a Piece-wise Constant Strain (PCS) model to represent prosthetic flexibility. Based on this system, the simulation methodology generates whole-body dynamic motions of a unilateral transtibial amputee using a reinforcement learning approach. This framework integrates imitation learning based on motion capture data with accurate computation of prosthetic dynamics. Running motions are simulated under multiple virtual prosthetic stiffness conditions, and the corresponding metabolic cost of transport (COT) obtained from these simulations is analyzed. The results suggest that variations in prosthetic stiffness influence running dynamics and performance, and that COT is consistent with values reported in prior study. Our findings demonstrate the potential of the proposed approach for simulation and analysis under virtual conditions that differ from real-world conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a reinforcement learning framework for simulating adaptive running motions in a unilateral transtibial amputee equipped with a flexible leaf-spring sports prosthesis. It models the prosthesis via a hybrid-link system incorporating the Piece-wise Constant Strain formulation, combines imitation learning from motion-capture data with explicit prosthetic deformation dynamics, generates whole-body running trajectories under multiple virtual stiffness conditions, computes metabolic cost of transport from the resulting motions, and concludes that stiffness variations influence running performance.
Significance. If the simulated whole-body dynamics and derived CoT values prove predictive of real physiological outcomes, the approach would offer a valuable virtual testbed for prosthesis design and selection, enabling systematic exploration of stiffness effects without repeated physical trials and potentially accelerating user-specific optimization.
major comments (2)
- [Abstract] Abstract: the central claim that simulated CoT trends under varying stiffness 'suggest that variations in stiffness influence running performance' is presented without any quantitative results, error metrics, baseline comparisons, or description of the metabolic-cost computation method (e.g., which energy model or equations convert simulated joint powers and kinematics into CoT). This absence leaves the claim unsupported by visible evidence and makes it impossible to judge whether observed differences arise from genuine biomechanical effects or model artifacts.
- [Methods / Results] The hybrid-link + Piece-wise Constant Strain model is asserted to produce sufficiently realistic whole-body dynamics for conclusions about real amputee performance, yet the manuscript supplies no direct validation (comparison of simulated kinematics, joint powers, or CoT against measured oxygen consumption or ground-truth data from the same subjects across stiffness conditions). Without such anchoring, differences in simulated CoT cannot be confidently attributed to prosthetic stiffness rather than modeling assumptions.
minor comments (1)
- [Methods] Notation for the hybrid-link system and Piece-wise Constant Strain parameters should be introduced with explicit definitions and units at first use to improve readability for readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which have helped us improve the clarity and scope of our simulation study. We have revised the abstract to include quantitative summaries and a brief description of the metabolic cost computation. For the validation concern, we have added explicit discussion of modeling assumptions and literature comparisons while clarifying that the work is simulation-focused.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that simulated CoT trends under varying stiffness 'suggest that variations in stiffness influence running performance' is presented without any quantitative results, error metrics, baseline comparisons, or description of the metabolic-cost computation method (e.g., which energy model or equations convert simulated joint powers and kinematics into CoT). This absence leaves the claim unsupported by visible evidence and makes it impossible to judge whether observed differences arise from genuine biomechanical effects or model artifacts.
Authors: We agree the abstract was too concise on these points. In the revised version, we now include a summary of the observed CoT trends (e.g., relative changes across the tested stiffness values), note that metabolic cost is computed via integration of positive joint powers using a standard model from the literature (detailed in the Methods), and reference baseline comparisons to the original motion-capture trajectories. Full quantitative results, including RL convergence metrics and CoT values, remain in the Results section. These additions make the central claim traceable to the evidence without altering the abstract's length substantially. revision: yes
-
Referee: [Methods / Results] The hybrid-link + Piece-wise Constant Strain model is asserted to produce sufficiently realistic whole-body dynamics for conclusions about real amputee performance, yet the manuscript supplies no direct validation (comparison of simulated kinematics, joint powers, or CoT against measured oxygen consumption or ground-truth data from the same subjects across stiffness conditions). Without such anchoring, differences in simulated CoT cannot be confidently attributed to prosthetic stiffness rather than modeling assumptions.
Authors: We acknowledge that direct experimental validation against oxygen-consumption data from the same subjects would provide stronger grounding. This study develops and demonstrates a simulation framework rather than claiming predictive accuracy for real physiology; we therefore lack paired real-world CoT measurements across stiffness conditions. In revision we have added a dedicated paragraph in the Discussion that (i) states the key assumptions of the Piece-wise Constant Strain formulation and hybrid-link dynamics, (ii) compares simulated kinematic trends and CoT sensitivity to published experimental findings on leaf-spring prostheses, and (iii) explicitly frames the results as simulation-derived insights to inform future user-specific experiments. The conclusions have been tempered accordingly. revision: partial
Circularity Check
No significant circularity detected; derivation relies on external motion capture and independent dynamics computation
full rationale
The paper describes a simulation pipeline that combines reinforcement learning, imitation learning from motion capture data, and a hybrid-link model with Piece-wise Constant Strain for prosthesis deformation. Running motions are generated for varying virtual stiffness values, after which metabolic cost of transport is computed from the resulting dynamics. No equations or procedures in the provided text reduce a claimed prediction or result to its own fitted inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems, no ansatzes are smuggled via prior work, and no known empirical patterns are merely renamed. The chain is self-contained: external motion data and standard RL training supply the inputs, while the stiffness variations and CoT estimates are downstream computations that do not loop back definitionally to those inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Piece-wise Constant Strain model accurately represents flexible deformation of the leaf-spring prosthesis within the hybrid-link system.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.