Mesh Graph Neural Network Framework for Accelerating Finite Element Simulation for Arbitrary Geometries
Pith reviewed 2026-06-27 19:50 UTC · model grok-4.3
The pith
A mesh graph neural network predicts von Mises stress on arbitrary unseen hole geometries using relative features for invariance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
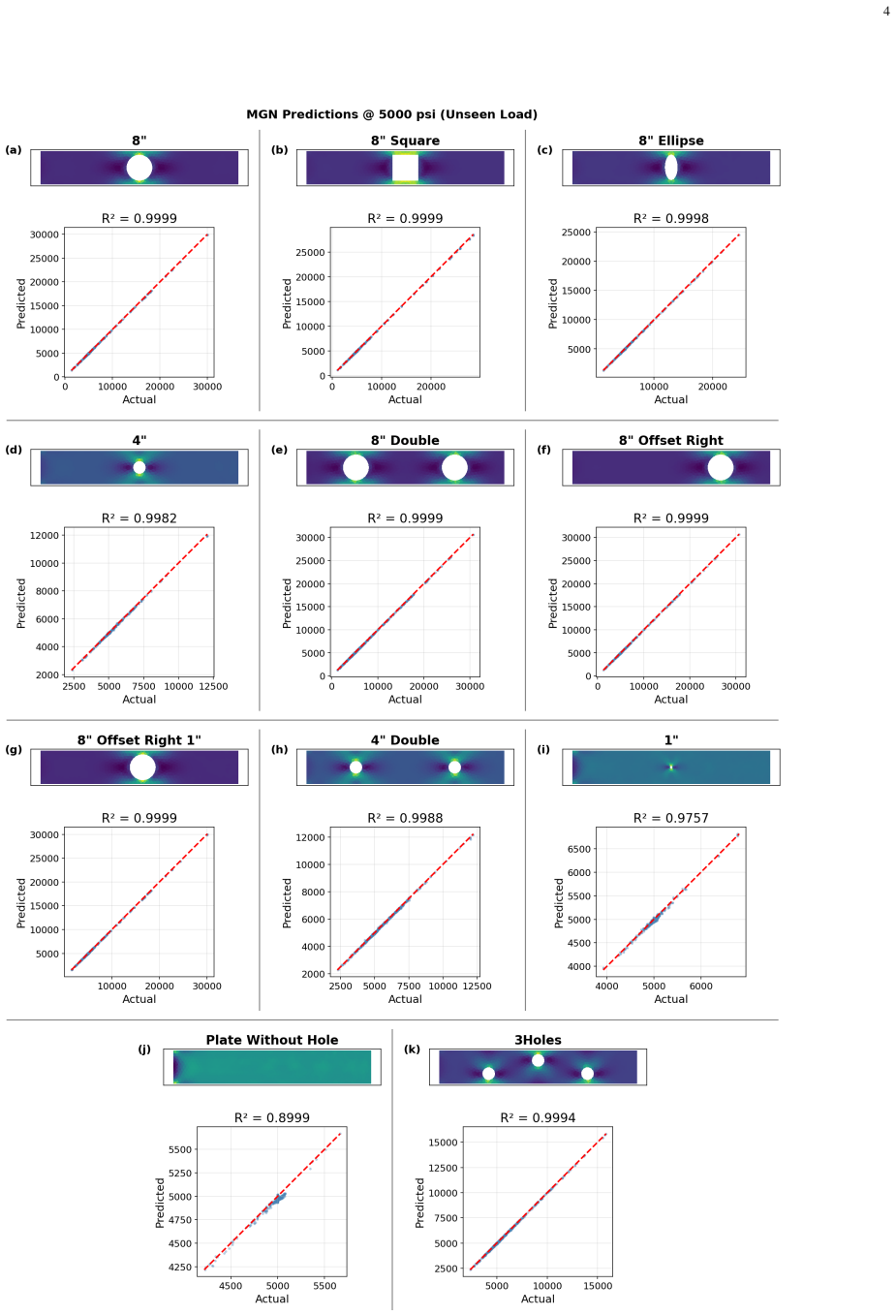
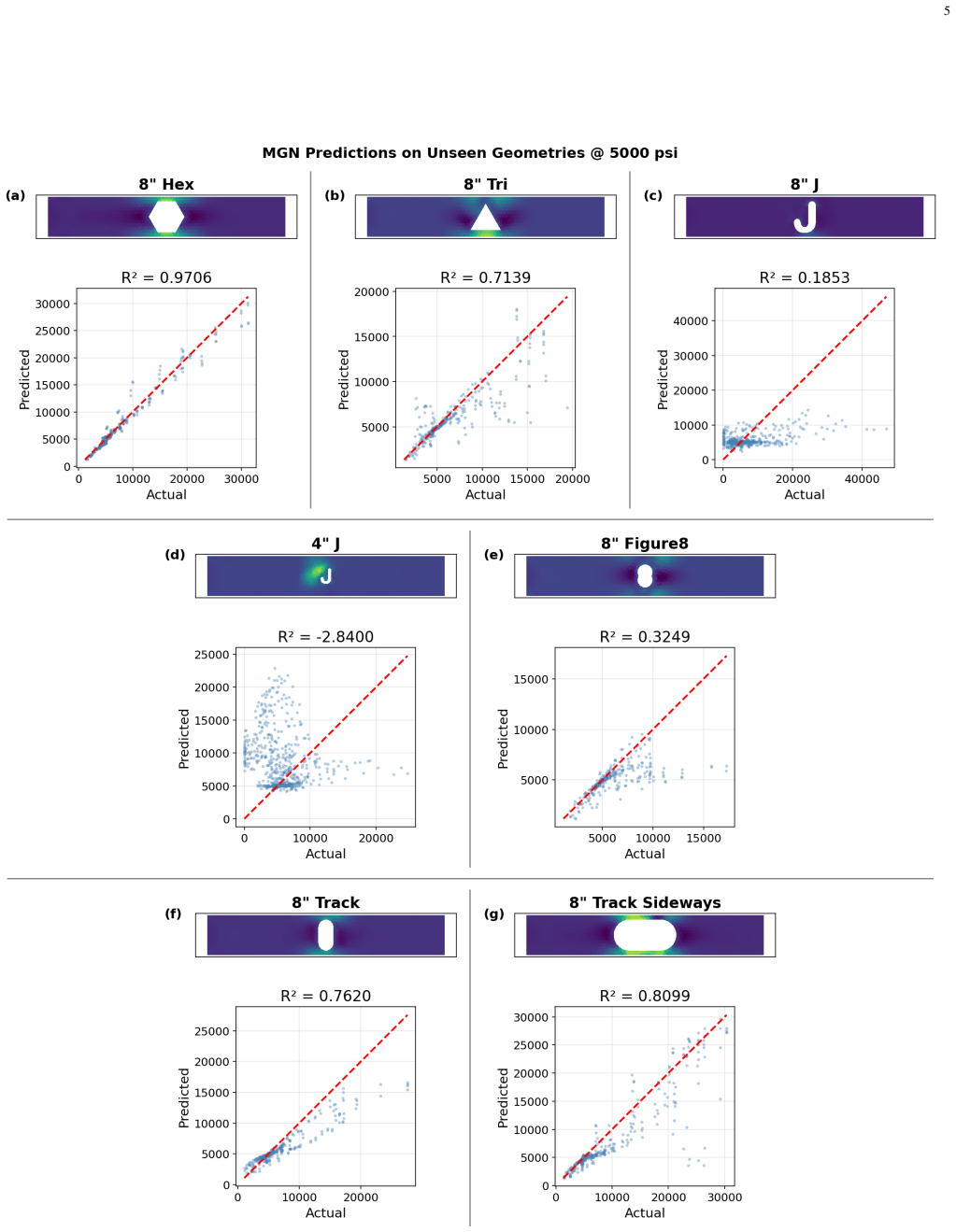
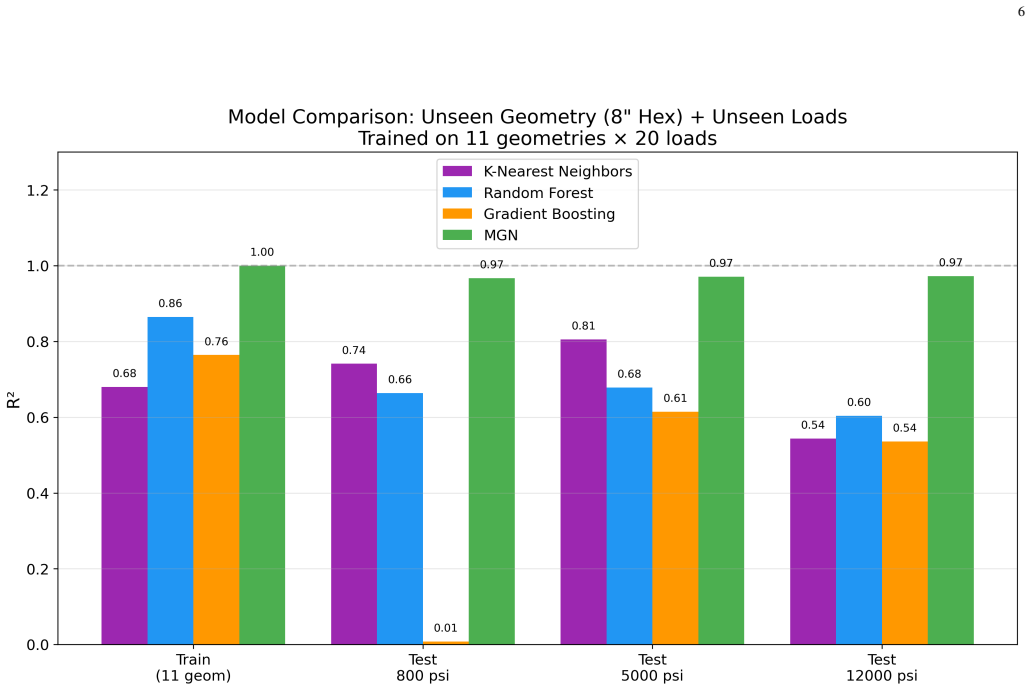
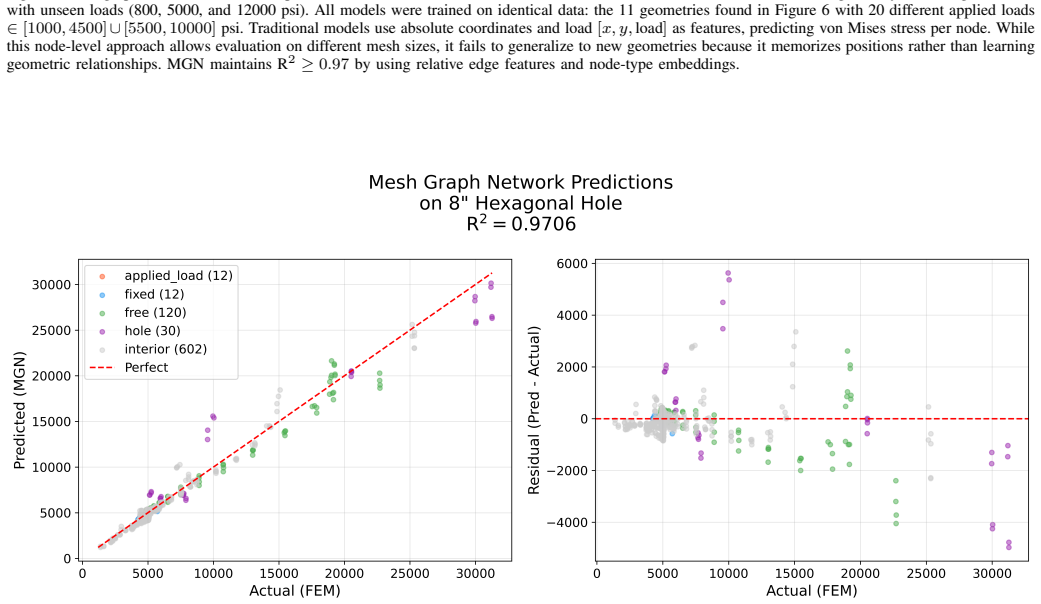
By extending existing mesh graph network frameworks to structural mechanics, the model encodes boundary conditions through node types, neighbor distances through relative edge features, and loading through global features; when trained on eleven plate geometries it produces accurate von Mises stress fields on seven unseen geometries and three unseen loads, outperforming conventional models that rely on absolute coordinates.
What carries the argument
Mesh graph network that supplies node types (fixed boundary, free surface, hole edge), relative edge features (distances between neighbors), and global load features to enforce translation and rotation invariance.
If this is right
- The network can serve as a surrogate that speeds up repeated finite-element evaluations during structural design iterations.
- Because the representation is invariant, the same trained model applies to translated or rotated components without retraining.
- Graph neural networks of this form extend prior mesh-based simulation methods from fluid problems into solid-mechanics stress prediction.
- Even in less favorable unseen cases the mesh graph network still exceeds the accuracy of conventional models trained on identical data.
Where Pith is reading between the lines
- If the relative-feature approach continues to generalize, the same architecture could be tested on three-dimensional solids or on problems with multiple load steps.
- Design-optimization loops that currently rerun full finite-element solves for each candidate shape might instead query the surrogate for rapid screening.
- The node-type and relative-distance encoding could be applied to other geometry-dependent simulations such as heat conduction or modal analysis.
Load-bearing premise
That the eleven training geometries supply enough variation in hole shapes for the relative-feature representation to generalize to arbitrary unseen holes.
What would settle it
Evaluating the trained network on a plate whose hole shape lies well outside the range of the eleven training examples and obtaining R-squared values no higher than those of random forest or gradient boosting on the same test case.
Figures

read the original abstract
Finite element analysis (FEA) is essential for structural design but remains computationally expensive, particularly when evaluating multiple design iterations or load scenarios. Machine learning surrogate models offer a promising alternative, yet most approaches struggle with a critical limitation: generalizing across varying geometries. This work presents a mesh graph network (MGN) for predicting von Mises stress fields in 2D structural components with arbitrary hole geometries. Unlike traditional machine learning approaches that use absolute node coordinates as features, the proposed model builds on existing MGN frameworks that encode node types (e.g., fixed boundary, free surface, hole edge), relative edge features (distance between neighbors), and global features (applied load). This architecture is inherently translation- and rotation-invariant, enabling generalization to unseen geometries without retraining. The MGN was trained on 11 plate geometries under 20 load conditions and evaluated on 7 unseen geometries and 3 unseen loads. In the most favorable case, the model achieves $R^2 \geq 0.97$ on an unseen geometry and unseen load, compared to $R^2 \approx 0.01$--$0.86$ for conventional models (Random Forest, Gradient Boosting , K-Nearest Neighbors) trained on identical data. However, even in less favorable cases, the MGN model still outperforms conventional models. This work extends the mesh-based simulation framework of Pfaff et al. (arXiv:2010.03409) to structural mechanics, demonstrating that graph neural networks can serve as efficient surrogates for finite element analysis across varying geometries.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a mesh graph neural network (MGN) for predicting von Mises stress fields in 2D plates with holes. It encodes node types (boundary conditions, hole edges), relative edge distances, and global load features to achieve translation/rotation invariance. Trained on 11 geometries under 20 loads and tested on 7 unseen geometries and 3 unseen loads, the model reports R² ≥ 0.97 in the best case on unseen geometry/load combinations, substantially outperforming Random Forest, Gradient Boosting, and K-Nearest Neighbors baselines trained on the same data. The work extends Pfaff et al. (arXiv:2010.03409) to structural FEA surrogates.
Significance. If the generalization claim holds with adequate documentation of geometry diversity, the result would be significant: it would show that relative-feature MGNs can serve as geometry-invariant surrogates for FEA, enabling rapid evaluation of design iterations without retraining. The explicit comparison to conventional ML models on identical data isolates the benefit of the graph encoding, and the extension of the Pfaff framework to mechanics is a clear contribution.
major comments (3)
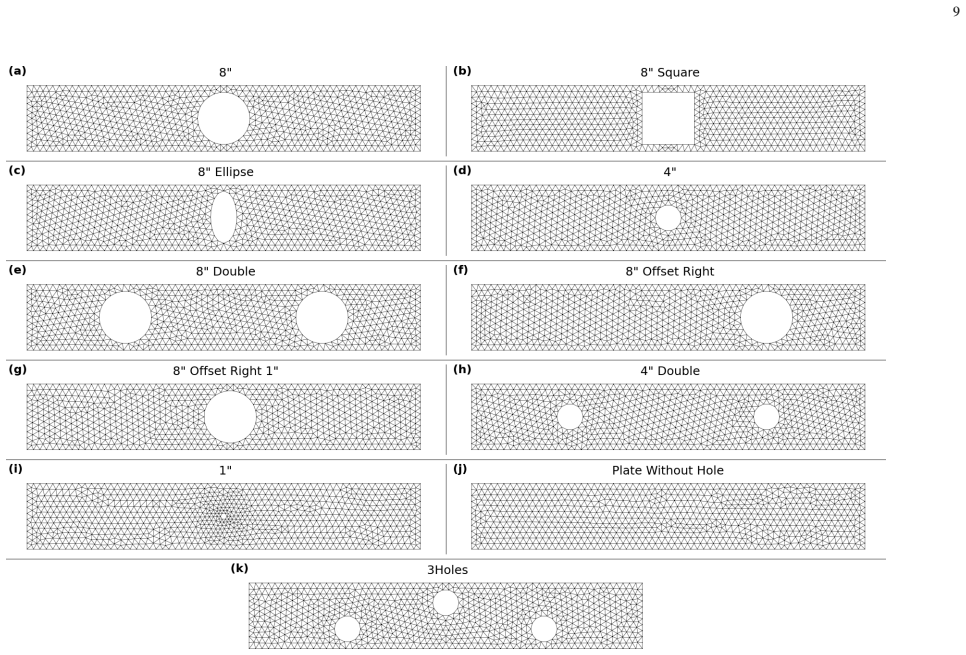
- [Abstract] Abstract: The central claim of generalization to 'arbitrary hole geometries' rests on the 11 training shapes providing sufficient coverage, yet the manuscript supplies no quantitative description of hole count, topology (single vs. multiple holes), aspect-ratio range, or shape variation (circular vs. polygonal) in either the training or test sets. This information is load-bearing for distinguishing interpolation from the advertised extrapolation to unseen geometries.
- [Abstract] Abstract: No details are given on mesh generation procedure, data normalization, training hyperparameters, loss function, optimizer, number of epochs, or statistical significance (e.g., standard deviation across runs) of the reported R² values. These omissions leave the performance numbers (R² ≥ 0.97 vs. baselines) only weakly supported.
- [Abstract] Abstract, paragraph on training/evaluation split: The performance gap versus baselines is attributed to the invariance properties of the node-type + relative-edge encoding, but without evidence that the 7 test geometries lie outside the convex hull of the 11 training examples, the gap could reflect differences in feature representation rather than true generalization capability.
minor comments (1)
- [Abstract] Abstract: Typo in baseline list ('Gradient Boosting , K-Nearest Neighbors' contains an extraneous space before the comma).
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important areas for improving clarity and supporting the generalization claims. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of generalization to 'arbitrary hole geometries' rests on the 11 training shapes providing sufficient coverage, yet the manuscript supplies no quantitative description of hole count, topology (single vs. multiple holes), aspect-ratio range, or shape variation (circular vs. polygonal) in either the training or test sets. This information is load-bearing for distinguishing interpolation from the advertised extrapolation to unseen geometries.
Authors: We agree that quantitative details on geometry diversity are essential to substantiate the claims of generalization to arbitrary holes. The dataset section describes the 11 training and 7 test plates but lacks a consolidated summary. In the revised manuscript we will add a table (or expanded paragraph) specifying, for each set: number of holes per geometry, single vs. multiple-hole topology, aspect-ratio ranges, and shape categories (circular, elliptical, polygonal). This will allow readers to better evaluate the degree of extrapolation versus interpolation. revision: yes
-
Referee: [Abstract] Abstract: No details are given on mesh generation procedure, data normalization, training hyperparameters, loss function, optimizer, number of epochs, or statistical significance (e.g., standard deviation across runs) of the reported R² values. These omissions leave the performance numbers (R² ≥ 0.97 vs. baselines) only weakly supported.
Authors: We acknowledge these omissions weaken reproducibility and confidence in the reported metrics. While the full methods section contains some of this information, it is not sufficiently explicit or complete. We will expand the methods (and, space permitting, the abstract) to document: mesh generation procedure, normalization steps, full hyperparameter list, loss function, optimizer, epoch count, and mean R² ± standard deviation across multiple independent runs. This will directly address the concern about weakly supported performance numbers. revision: yes
-
Referee: [Abstract] Abstract, paragraph on training/evaluation split: The performance gap versus baselines is attributed to the invariance properties of the node-type + relative-edge encoding, but without evidence that the 7 test geometries lie outside the convex hull of the 11 training examples, the gap could reflect differences in feature representation rather than true generalization capability.
Authors: The test geometries were deliberately selected with distinct hole counts, positions, and shapes not appearing in the training set, and the relative-edge encoding is designed to confer invariance. However, we did not compute an explicit convex-hull analysis in feature space. In revision we will add a short discussion plus a supplementary visualization (e.g., PCA projection of simple shape descriptors) to illustrate geometric separation. If the analysis cannot be completed without new experiments, we will qualify the language from “arbitrary” to “unseen” geometries while retaining the empirical outperformance on held-out loads. revision: partial
Circularity Check
No significant circularity; generalization claims rest on held-out test geometries
full rationale
The paper reports empirical performance (R² ≥ 0.97) on 7 explicitly unseen geometries and 3 unseen loads after training on 11 geometries, with no derivation step that reduces by construction to fitted inputs or self-citations. The MGN encoding (node types, relative edges, global loads) is presented as an extension of Pfaff et al. (arXiv:2010.03409) without load-bearing self-citation chains or ansatz smuggling. No equations equate predictions to training statistics by definition, and the architecture's invariance properties are not invoked as a uniqueness theorem from the same authors. The central result is therefore an independent empirical observation on held-out data rather than a tautological renaming or fit.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural-network hyperparameters
axioms (1)
- domain assumption Node-type and relative-distance features are sufficient to encode the boundary-value problem for linear elasticity.
Reference graph
Works this paper leans on
-
[1]
Random forests,
L. Breiman, “Random forests,”Machine Learning, vol. 45, no. 1, pp. 5–32, 2001
2001
-
[2]
Greedy function approximation: A gradient boosting machine,
J. H. Friedman, “Greedy function approximation: A gradient boosting machine,”The Annals of Statistics, vol. 29, no. 5, pp. 1189–1232, 2001
2001
-
[3]
Nearest neighbor pattern classification,
T. M. Cover and P. E. Hart, “Nearest neighbor pattern classification,” IEEE Transactions on Information Theory, vol. 13, no. 1, pp. 21–27, 1967
1967
-
[4]
Learning mesh-based simulation with graph networks,
T. Pfaff, M. Fortunato, A. Sanchez-Gonzalez, and P. W. Battaglia, “Learning mesh-based simulation with graph networks,”arXiv preprint arXiv:2010.03409, 2021
arXiv 2010
-
[5]
Bathe,Finite Element Procedures
K.-J. Bathe,Finite Element Procedures. Upper Saddle River, NJ: Prentice Hall, 2006
2006
-
[6]
T. J. Hughes,The Finite Element Method: Linear Static and Dynamic Finite Element Analysis. Mineola, NY: Dover Publications, 2012
2012
-
[7]
O. C. Zienkiewicz, R. L. Taylor, and J. Zhu,The Finite Element Method: Its Basis and Fundamentals, 7th ed. Butterworth-Heinemann, 2013
2013
-
[8]
Managing computational complexity using surrogate models: a critical review,
R. Alizadeh, J. K. Allen, and F. Mistree, “Managing computational complexity using surrogate models: a critical review,”Research in Engineering Design, vol. 31, no. 3, pp. 275–298, 2020
2020
-
[9]
Jiang, Q
P. Jiang, Q. Zhou, and X. Shao,Surrogate Model-Based Engineering Design and Optimization. Springer Singapore, 2020
2020
-
[10]
Eighty years of the finite element method: Birth, evolution, and future,
W. K. Liu, S. Li, and H. S. Park, “Eighty years of the finite element method: Birth, evolution, and future,”Archives of Computational Meth- ods in Engineering, vol. 29, no. 6, pp. 4431–4453, 2022
2022
-
[11]
Physics-informed machine learning,
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, and L. Yang, “Physics-informed machine learning,”Nature Reviews Physics, vol. 3, no. 6, pp. 422–440, 2021
2021
-
[12]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,
M. Raissi, P. Perdikaris, and G. E. Karniadakis, “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,” Journal of Computational Physics, vol. 378, pp. 686–707, 2019
2019
-
[13]
A statistical perspective for predicting the strength of metals: Revisiting the Hall–Petch relationship using machine learning,
Y . Gu, C. D. Stiles, and J. A. El-Awady, “A statistical perspective for predicting the strength of metals: Revisiting the Hall–Petch relationship using machine learning,”Acta Materialia, vol. 266, p. 119631, 2024
2024
-
[14]
A deep learning approach to estimate stress distribution: a fast and accurate surrogate of finite- element analysis,
L. Liang, M. Liu, C. Martin, and W. Sun, “A deep learning approach to estimate stress distribution: a fast and accurate surrogate of finite- element analysis,”Journal of The Royal Society Interface, vol. 15, no. 138, p. 20170844, 2018
2018
-
[15]
Stress field prediction in cantilevered structures using convolutional neural networks,
Z. Nie, H. Jiang, and L. B. Kara, “Stress field prediction in cantilevered structures using convolutional neural networks,”Journal of Computing and Information Science in Engineering, vol. 20, no. 1, p. 011002, 2020. 10
2020
-
[16]
Surrogate modeling of parametrized finite element simulations with varying mesh topology using recurrent neural networks,
L. Greve and B. P. van de Weg, “Surrogate modeling of parametrized finite element simulations with varying mesh topology using recurrent neural networks,”Array, vol. 14, p. 100137, 2022
2022
-
[17]
Crystal graph convolutional neural networks for an accurate and interpretable prediction of material properties,
T. Xie and J. C. Grossman, “Crystal graph convolutional neural networks for an accurate and interpretable prediction of material properties,” Physical Review Letters, vol. 120, no. 14, p. 145301, 2018
2018
-
[18]
Atomistic line graph neural network for improved materials property predictions,
K. Choudhary and B. DeCost, “Atomistic line graph neural network for improved materials property predictions,”npj Computational Materials, vol. 7, no. 1, p. 185, 2021
2021
-
[19]
Graph neural network modeling of grain-scale anisotropic elastic behavior using simulated and measured microscale data,
D. C. Pagan, C. R. Pash, A. R. Benson, and M. P. Kasemer, “Graph neural network modeling of grain-scale anisotropic elastic behavior using simulated and measured microscale data,”npj Computational Materials, vol. 8, p. 259, 2022
2022
-
[20]
Predicting stress, strain and defor- mation fields in materials and structures with graph neural networks,
M. Maurizi, C. Gao, and F. Berto, “Predicting stress, strain and defor- mation fields in materials and structures with graph neural networks,” Scientific Reports, vol. 12, no. 1, p. 21834, 2022
2022
-
[21]
Graph neural network en- hanced finite element modelling,
R. Gulakala, B. Markert, and M. Stoffel, “Graph neural network en- hanced finite element modelling,”PAMM, vol. 22, no. 1, p. e202200306, 2023
2023
-
[22]
A generative learning and graph-based framework for computing field variables in finite element simulations,
R. Gulakala, V . Bhaskaran, and M. Stoffel, “A generative learning and graph-based framework for computing field variables in finite element simulations,”Computer Methods in Applied Mechanics and Engineering, vol. 428, p. 117111, 2024
2024
-
[23]
Fast prediction of stress distribution: A gnn-based surrogate model for unstructured mesh fea,
J. Wu, C. Du, B. Dillenburger, and M. A. Kraus, “Fast prediction of stress distribution: A gnn-based surrogate model for unstructured mesh fea,” inProceedings of the IASS Annual Symposia, 2024
2024
-
[24]
Fem-pinn: integrating finite element method and physics-informed neural network for performance prediction of engineering structures via graph neural network,
W. Hou, S. Lv, Y . Li, and C. Wang, “Fem-pinn: integrating finite element method and physics-informed neural network for performance prediction of engineering structures via graph neural network,”Structural and Multidisciplinary Optimization, vol. 69, p. 72, 2026
2026
-
[25]
Mesh-based GNN surrogates for time-independent PDEs,
R. J. Gladstone, H. Rahmani, V . Suryakumar, H. Meidani, M. D’Elia, and A. Zareei, “Mesh-based GNN surrogates for time-independent PDEs,”Scientific Reports, vol. 14, no. 1, p. 3394, 2024
2024
-
[26]
Relational inductive biases, deep learning, and graph networks,
P. W. Battaglia, J. B. Hamrick, V . Bapst, A. Sanchez-Gonzalez, V . Zam- baldi, M. Malinowski, A. Tacchetti, D. Raposo, A. Santoro, R. Faulkner, C. Gulcehre, F. Song, A. Ballard, J. Gilmer, G. Dahl, A. Vaswani, K. Allen, C. Nash, V . Langston, C. Dyer, N. Heess, D. Wierstra, P. Kohli, M. Botvinick, O. Vinyals, Y . Li, and R. Pascanu, “Relational inductive...
Pith/arXiv arXiv 2018
-
[27]
Learning to simulate complex physics with graph networks,
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, and P. Battaglia, “Learning to simulate complex physics with graph networks,” inInternational Conference on Machine Learning. PMLR, 2020, pp. 8459–8468
2020
-
[28]
Physics-informed MeshGraphNets (PI-MGNs): Neural finite element solvers for non-stationary and nonlinear simulations on arbitrary meshes,
T. W ¨urth, N. Freymuth, C. Zimmerling, G. Neumann, and L. K ¨arger, “Physics-informed MeshGraphNets (PI-MGNs): Neural finite element solvers for non-stationary and nonlinear simulations on arbitrary meshes,”Computer Methods in Applied Mechanics and Engineering, vol. 431, p. 117119, 2024
2024
-
[29]
Pushing the limit of molecular dynamics with ab initio accuracy to 100 million atoms with machine learning,
W. Jia, H. Wang, M. Chenet al., “Pushing the limit of molecular dynamics with ab initio accuracy to 100 million atoms with machine learning,” inProceedings of the International Conference for High Performance Computing, Networking, Storage and Analysis (SC), 2020
2020
-
[30]
A. Hartmaier, “An artificial neural network for surrogate modeling of stress fields in viscoplastic polycrystalline materials,”npj Computational Materials, vol. 9, no. 1, p. 37, 2023, article 37. [Online]. Available: https://doi.org/10.1038/s41524-023-00991-z
-
[31]
Deep learning predicts path-dependent plasticity,
M. Mozaffar, R. Bostanabad, W. Chen, K. Ehmann, J. Cao, and M. A. Bessa, “Deep learning predicts path-dependent plasticity,”Proceedings of the National Academy of Sciences, vol. 116, no. 52, pp. 26 414– 26 420, 2019
2019
-
[32]
Uncertainty- aware machine learning framework for predicting dislocation plasticity and stress–strain response in FCC alloys,
J. Luo, Y . Gu, Y . Wang, X. Ma, and J. A. El-Awady, “Uncertainty- aware machine learning framework for predicting dislocation plasticity and stress–strain response in FCC alloys,”Acta Materialia, p. 121610, 2025
2025
-
[33]
Deep learning- based surrogate models for parametrized PDEs: Handling geometric variability through graph neural networks,
N. R. Franco, S. Fresca, F. Tombari, and A. Manzoni, “Deep learning- based surrogate models for parametrized PDEs: Handling geometric variability through graph neural networks,”Chaos: An Interdisciplinary Journal of Nonlinear Science, vol. 33, no. 12, p. 123121, 2023
2023
-
[34]
S. P. Timoshenko and J. N. Goodier,Theory of Elasticity, 2nd ed. New York: McGraw-Hill, 1951
1951
-
[35]
Gmsh: A 3-d finite element mesh generator with built-in pre- and post-processing facilities,
C. Geuzaine and J.-F. Remacle, “Gmsh: A 3-d finite element mesh generator with built-in pre- and post-processing facilities,”International Journal for Numerical Methods in Engineering, vol. 79, no. 11, pp. 1309–1331, 2009
2009
-
[36]
The fenics project version 1.5,
M. Alnæs, J. Blechta, J. Hake, A. Johansson, B. Kehlet, A. Logg, C. Richardson, J. Ring, M. E. Rognes, and G. N. Wells, “The fenics project version 1.5,”Archive of Numerical Software, vol. 3, no. 100, 2015
2015
-
[37]
Adam: A method for stochastic optimization,
D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,” arXiv preprint arXiv:1412.6980, 2014
Pith/arXiv arXiv 2014
-
[38]
Pytorch: An imperative style, high-performance deep learning library,
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antigaet al., “Pytorch: An imperative style, high-performance deep learning library,” inAdvances in Neural Information Processing Systems, vol. 32, 2019
2019
-
[39]
Fast graph representation learning with pytorch geometric,
M. Fey and J. E. Lenssen, “Fast graph representation learning with pytorch geometric,”arXiv preprint arXiv:1903.02428, 2019
Pith/arXiv arXiv 1903
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.