Function-Space Priors for Bayesian Neural ODEs with Application to Vessel Trajectory Prediction
Pith reviewed 2026-06-27 23:14 UTC · model grok-4.3
The pith
Bayesian Neural ODEs gain function-space priors on their vector field by adding a GP-kernel regularizer to the variational objective at finite measurement points.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Imposing a GP-kernel-based prior directly on the vector field evaluated at a finite set of measurement points via augmentation of the weight-space variational objective with a kernel-based regularizer addresses the limitation of isotropic Gaussian priors and enables informative structural properties for vessel dynamics in Bayesian Neural ODEs.
What carries the argument
Kernel-based regularizer added to the variational objective that penalizes vector-field deviations from GP structure at finite measurement points
Load-bearing premise
Penalizing vector-field deviations from a GP at only finite measurement points is enough to approximate the desired function-space prior over ODE solutions.
What would settle it
Training the same Bayesian Neural ODE model on the same AIS dataset once with and once without the kernel regularizer and finding no improvement in either predictive accuracy or uncertainty calibration on held-out trajectories would falsify the claim.
Figures

read the original abstract
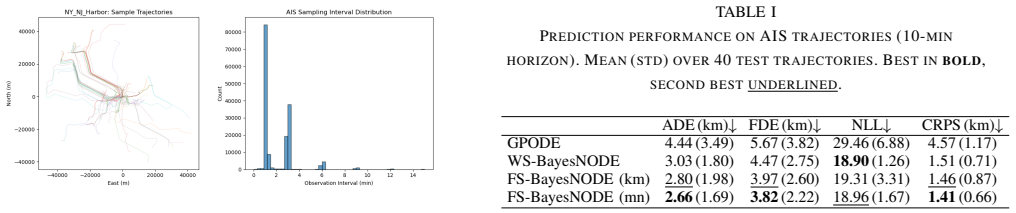
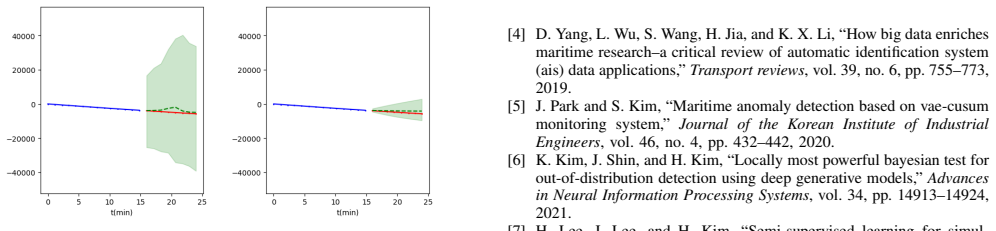
Vessel trajectory prediction from Automatic Identification System (AIS) data is essential for maritime situational awareness, yet it remains challenging due to irregular sampling, missing reports, and complex dynamics. Beyond accurate point forecasts, maritime applications also demand well-calibrated uncertainty estimates for reliable decision-making. Bayesian Neural Ordinary Differential Equations (ODEs) offer a principled framework for continuous-time trajectory modeling with uncertainty quantification by placing a prior over the neural vector field parameters. However, the commonly used isotropic Gaussian weight prior fails to encode informative structural properties of vessel dynamics, such as smoothness and locality. Existing function-space Bayesian neural network methods address this limitation for static mappings, but do not transfer directly to Neural ODEs, where the primary quantity of interest is the trajectory rather than the vector field itself. In principle, one could place a Gaussian process (GP) prior directly over ODE solutions, but this requires propagating distributions through a nonlinear ODE solver, which is analytically intractable. To address this challenge, we adopt a practical approach that imposes a GP-kernel-based prior directly on the vector field evaluated at a finite set of measurement points. Specifically, we augment the standard weight-space variational objective with a kernel-based regularizer that penalizes deviations of the vector field from the structure implied by a GP prior. To handle long and irregular AIS trajectories, we further combine this function-space regularization with probabilistic multiple shooting, which decouples inference across temporal segments while maintaining global consistency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that augmenting the weight-space ELBO for Bayesian Neural ODEs with a GP-kernel regularizer on the vector field at finite measurement points (combined with probabilistic multiple shooting) provides an effective approximation to a function-space prior, enabling informative structural properties such as smoothness for vessel trajectory prediction from irregular AIS data, where direct GP propagation through the ODE solver is intractable.
Significance. If the finite-point regularizer is shown to induce appropriate trajectory-level distributions, the approach would offer a practical route to non-isotropic priors in continuous-time Bayesian models, improving uncertainty calibration in applications with complex dynamics; the combination with multiple shooting for long irregular sequences is a pragmatic engineering contribution.
major comments (2)
- [Abstract / method description] The central approximation—that pointwise kernel regularization on f_θ(x_i) at finite measurement points induces the target GP properties on integrated trajectories x(t) = x_0 + ∫ f_θ(x(s)) ds—is load-bearing for the claim but lacks justification. The abstract explicitly notes the intractability of direct propagation, yet no derivation, bound, or analysis of the push-forward measure on solution space is supplied to show that local penalties control accumulated nonlinear flow errors.
- [Abstract / experimental section] No empirical validation or ablation of the regularizer strength is described that would demonstrate whether the finite-point surrogate actually yields smoother or more locally consistent trajectories compared to the isotropic Gaussian baseline; without such results the effectiveness claim cannot be assessed.
minor comments (2)
- Notation for how the kernel regularizer is exactly added to the variational objective (e.g., as an additive term with coefficient λ) should be made explicit with an equation.
- Clarify the choice of measurement points x_i and whether they are fixed or data-dependent.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The two major comments identify key areas where additional justification and validation would strengthen the contribution. We address each point below and commit to revisions that directly respond to the concerns while preserving the paper's focus on the practical approximation for Neural ODEs.
read point-by-point responses
-
Referee: [Abstract / method description] The central approximation—that pointwise kernel regularization on f_θ(x_i) at finite measurement points induces the target GP properties on integrated trajectories x(t) = x_0 + ∫ f_θ(x(s)) ds—is load-bearing for the claim but lacks justification. The abstract explicitly notes the intractability of direct propagation, yet no derivation, bound, or analysis of the push-forward measure on solution space is supplied to show that local penalties control accumulated nonlinear flow errors.
Authors: We agree that the manuscript presents the finite-point kernel regularizer as a practical surrogate motivated by the intractability of propagating GP distributions through the nonlinear ODE solver, without supplying a formal derivation or bound on the induced push-forward measure over trajectories. The approach is intended to encourage GP-like local behavior in the vector field at measurement points, which, combined with the continuous dynamics, is expected to promote smoother integrated paths; however, we do not claim this exactly reproduces the target trajectory-level GP prior. In the revised manuscript we will add a dedicated discussion subsection that (i) explicitly states the approximation nature of the method, (ii) provides a brief analysis for the linear ODE case where the push-forward can be characterized exactly, and (iii) discusses the limitations for strongly nonlinear flows, including the role of multiple shooting in mitigating error accumulation. revision: yes
-
Referee: [Abstract / experimental section] No empirical validation or ablation of the regularizer strength is described that would demonstrate whether the finite-point surrogate actually yields smoother or more locally consistent trajectories compared to the isotropic Gaussian baseline; without such results the effectiveness claim cannot be assessed.
Authors: The current experiments focus on overall predictive performance on AIS data and comparison against standard Bayesian Neural ODE baselines. We did not include targeted ablations that isolate the effect of the kernel regularizer strength (e.g., varying the GP kernel length-scale or amplitude while holding other factors fixed) or quantitative metrics of trajectory smoothness and local consistency. We acknowledge that such results are necessary to substantiate the claim that the surrogate induces the desired structural properties. In the revision we will add an ablation subsection that reports performance and qualitative trajectory visualizations across a range of regularization strengths, together with metrics such as average curvature or integrated squared second derivative to quantify smoothness relative to the isotropic Gaussian prior. revision: yes
Circularity Check
No significant circularity; method is an explicit approximation without self-referential reduction
full rationale
The paper's central construction augments the weight-space ELBO with a kernel regularizer on f_θ(x_i) at finite measurement points, explicitly framed as a practical surrogate because direct GP propagation through the nonlinear ODE solver is intractable. This is not presented as a derivation that recovers the target distribution by construction, nor does any equation equate the regularized objective to the desired function-space prior on trajectories. No self-citation chain, uniqueness theorem, or ansatz smuggling is invoked to justify the choice; the approach builds on standard variational inference plus GP kernels. The finite-point regularizer is acknowledged as an approximation whose fidelity to integrated trajectories is not proven, but this is a modeling limitation rather than circularity. The derivation chain remains self-contained against external benchmarks (standard VI, GP regularization) and does not reduce any claimed prediction or prior to its own fitted inputs.
Axiom & Free-Parameter Ledger
free parameters (2)
- GP kernel hyperparameters
- Regularizer strength
axioms (2)
- domain assumption The variational posterior can be optimized by augmenting the ELBO with a kernel-based regularizer that approximates function-space properties.
- domain assumption Probabilistic multiple shooting maintains global consistency across decoupled temporal segments.
Reference graph
Works this paper leans on
-
[1]
Deep latent factor model for spatio- temporal forecasting,
W. Koo, E.-Y . Ma, and H. Kim, “Deep latent factor model for spatio- temporal forecasting,”Technometrics, vol. 66, no. 3, pp. 470–482, 2024
2024
-
[2]
Crime risk maps: A multivariate spatial analysis of crime data,
J. Chung and H. Kim, “Crime risk maps: A multivariate spatial analysis of crime data,”Geographical analysis, vol. 51, no. 4, pp. 475– 499, 2019
2019
-
[3]
Ex- ploiting ais data for intelligent maritime navigation: A comprehensive survey from data to methodology,
E. Tu, G. Zhang, L. Rachmawati, E. Rajabally, and G.-B. Huang, “Ex- ploiting ais data for intelligent maritime navigation: A comprehensive survey from data to methodology,”IEEE Transactions on Intelligent Transportation Systems, vol. 19, no. 5, pp. 1559–1582, 2017
2017
-
[4]
How big data enriches maritime research–a critical review of automatic identification system (ais) data applications,
D. Yang, L. Wu, S. Wang, H. Jia, and K. X. Li, “How big data enriches maritime research–a critical review of automatic identification system (ais) data applications,”Transport reviews, vol. 39, no. 6, pp. 755–773, 2019
2019
-
[5]
Maritime anomaly detection based on vae-cusum monitoring system,
J. Park and S. Kim, “Maritime anomaly detection based on vae-cusum monitoring system,”Journal of the Korean Institute of Industrial Engineers, vol. 46, no. 4, pp. 432–442, 2020
2020
-
[6]
Locally most powerful bayesian test for out-of-distribution detection using deep generative models,
K. Kim, J. Shin, and H. Kim, “Locally most powerful bayesian test for out-of-distribution detection using deep generative models,”Advances in Neural Information Processing Systems, vol. 34, pp. 14913–14924, 2021
2021
-
[7]
Semi-supervised learning for simul- taneous location detection and classification of mixed-type defect patterns in wafer bin maps,
H. Lee, J. Lee, and H. Kim, “Semi-supervised learning for simul- taneous location detection and classification of mixed-type defect patterns in wafer bin maps,”IEEE Transactions on Semiconductor Manufacturing, vol. 36, no. 2, pp. 220–230, 2023
2023
-
[8]
Contextual anomaly detection for high- dimensional data using dirichlet process variational autoencoder,
H. Kim and H. Kim, “Contextual anomaly detection for high- dimensional data using dirichlet process variational autoencoder,”IISE Transactions, vol. 55, no. 5, pp. 433–444, 2023
2023
-
[9]
Application of kernel principal com- ponent analysis to multi-characteristic parameter design problems,
W. Soh, H. Kim, and B.-J. Yum, “Application of kernel principal com- ponent analysis to multi-characteristic parameter design problems,” Annals of Operations research, vol. 263, no. 1, pp. 69–91, 2018
2018
-
[10]
Looking back on the current day: interruptibility prediction using daily behavioral features,
M. Choy, D. Kim, J.-G. Lee, H. Kim, and H. Motoda, “Looking back on the current day: interruptibility prediction using daily behavioral features,” inProceedings of the 2016 ACM international joint confer- ence on pervasive and ubiquitous computing, pp. 1004–1015, 2016
2016
-
[11]
Dependence maps, a dimensionality reduction with dependence distance for high-dimensional data,
K. Lee, A. Gray, and H. Kim, “Dependence maps, a dimensionality reduction with dependence distance for high-dimensional data,”Data Mining and Knowledge Discovery, vol. 26, no. 3, pp. 512–532, 2013
2013
-
[12]
Uncertainty estimation by density aware evidential deep learning,
T. Yoon and H. Kim, “Uncertainty estimation by density aware evidential deep learning,”arXiv preprint arXiv:2409.08754, 2024
-
[13]
Uncertainty estimation by flexible evidential deep learning,
T. Yoon and H. Kim, “Uncertainty estimation by flexible evidential deep learning,”Advances in Neural Information Processing Systems, vol. 38, pp. 118601–118641, 2026
2026
-
[14]
Neu- ral ordinary differential equations,
R. T. Chen, Y . Rubanova, J. Bettencourt, and D. K. Duvenaud, “Neu- ral ordinary differential equations,”Advances in neural information processing systems, vol. 31, 2018
2018
-
[15]
Neural differential equations for continuous-time analysis,
Y . Oh, D. Lim, and S. Kim, “Neural differential equations for continuous-time analysis,” inProceedings of the 34th ACM Inter- national Conference on Information and Knowledge Management, pp. 6837–6840, 2025
2025
-
[16]
Dualdynamics: Synergizing implicit and explicit methods for robust irregular time series analysis,
Y . Oh, D.-Y . Lim, and S. Kim, “Dualdynamics: Synergizing implicit and explicit methods for robust irregular time series analysis,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 39, pp. 19730–19739, 2025
2025
-
[17]
Latent neural odes with sparse bayesian multiple shooting,
V . Iakovlev, C. Yildiz, M. Heinonen, and H. L ¨ahdesm¨aki, “Latent neural odes with sparse bayesian multiple shooting,”arXiv preprint arXiv:2210.03466, 2022
-
[18]
Vari- ational multiple shooting for bayesian odes with gaussian processes,
P. Hegde, C ¸ . Yıldız, H. L¨ahdesm¨aki, S. Kaski, and M. Heinonen, “Vari- ational multiple shooting for bayesian odes with gaussian processes,” inUncertainty in Artificial Intelligence, pp. 790–799, PMLR, 2022
2022
-
[19]
Functional Variational Bayesian Neural Networks
S. Sun, G. Zhang, J. Shi, and R. Grosse, “Functional variational bayesian neural networks,”arXiv preprint arXiv:1903.05779, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1903
-
[20]
Tractable function- space variational inference in bayesian neural networks,
T. G. Rudner, Z. Chen, Y . W. Teh, and Y . Gal, “Tractable function- space variational inference in bayesian neural networks,”Advances in Neural Information Processing Systems, vol. 35, pp. 22686–22698, 2022
2022
-
[21]
Well-defined function-space variational inference in bayesian neural networks via regularized kl-divergence,
T. Cinquin and R. Bamler, “Well-defined function-space variational inference in bayesian neural networks via regularized kl-divergence,” inThe 41st Conference on Uncertainty in Artificial Intelligence, 2025
2025
-
[22]
A general framework for updating belief distributions,
P. G. Bissiri, C. C. Holmes, and S. G. Walker, “A general framework for updating belief distributions,”Journal of the Royal Statistical Society Series B: Statistical Methodology, vol. 78, no. 5, pp. 1103– 1130, 2016
2016
-
[23]
Un- derstanding variational inference in function-space,
D. R. Burt, S. W. Ober, A. Garriga-Alonso, and M. van der Wilk, “Un- derstanding variational inference in function-space,”arXiv preprint arXiv:2011.09421, 2020
-
[24]
Latent ordinary differential equations for irregularly-sampled time series,
Y . Rubanova, R. T. Chen, and D. K. Duvenaud, “Latent ordinary differential equations for irregularly-sampled time series,”Advances in neural information processing systems, vol. 32, 2019
2019
-
[25]
R. Dandekar, K. Chung, V . Dixit, M. Tarek, A. Garcia-Valadez, K. V . Vemula, and C. Rackauckas, “Bayesian neural ordinary differential equations,”arXiv preprint arXiv:2012.07244, 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.