Quantum-Enhanced Distributed Sensor Fusion: Lower Bounds on Aggregation from Projection Noise to Heisenberg-Limited Byzantine-Tolerant Networks
Pith reviewed 2026-05-20 02:56 UTC · model grok-4.3
The pith
Quantum sensor fusion under Byzantine faults has mean squared error bounds that interpolate continuously between the standard quantum limit and the Heisenberg limit as a function of entanglement visibility.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
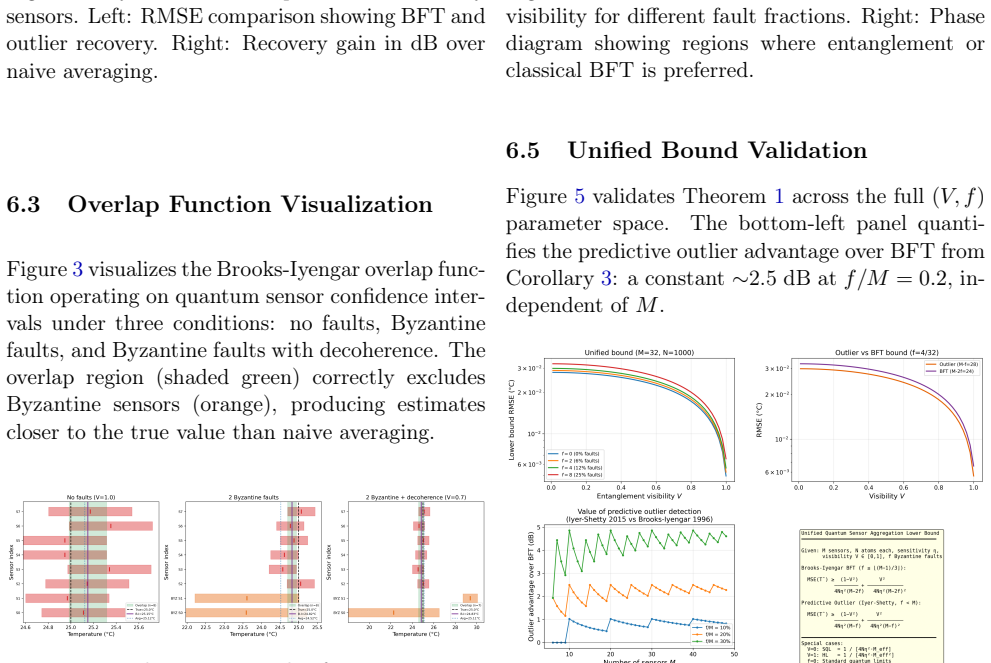
For M quantum sensors each with N atoms and sensitivity eta, any estimator obeys the mean squared error lower bound MSE >= (1-V^2)/(4*N*eta^2*M_eff) + V^2/(4*N*eta^2*M_eff^2), where the effective sensor count M_eff equals M-2f under the Brooks-Iyengar Byzantine tolerance rule and equals M-f when predictive outlier detection removes faults. The bound is indexed by the two parameters entanglement visibility V and fault fraction f/M. When V equals zero the expression reduces to the standard quantum limit scaling as 1 over square root of M_eff; when V equals one it reduces to the Heisenberg limit scaling as 1 over M_eff. Monte Carlo trials up to 64 sensors and experiments on the Intel Berkeley
What carries the argument
The two-parameter family of mean squared error lower bounds indexed by entanglement visibility V and fault fraction f/M, obtained by extending the classical Brooks-Iyengar overlap function and its vector version together with the predictive outlier model to quantum sensors.
If this is right
- With predictive outlier detection the effective sensor count is M-f, so the same visibility V yields a tighter bound than the Brooks-Iyengar case of M-2f.
- At V=1 the error scales as 1/M_eff even after faults are removed, preserving the full Heisenberg advantage in a fault-tolerant network.
- At V=0 the bound reverts to standard quantum limit scaling 1/sqrt(M_eff) regardless of which fault-tolerance rule is used.
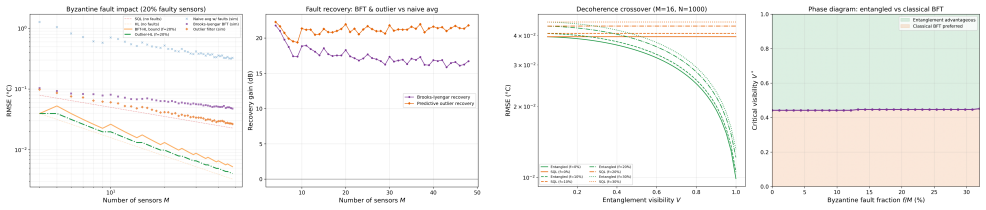
- Simulations confirm that entanglement supplies 20-27 dB SNR gain per cluster when the visibility term dominates.
- Missing classical sensor readings degrade agreement in the same pattern as reduced quantum visibility, allowing a single error model for hybrid networks.
Where Pith is reading between the lines
- The continuous interpolation in V suggests that partial entanglement can be traded against fault tolerance in network design without discrete jumps in performance.
- Because the same degradation pattern appears for both missing classical data and quantum decoherence, hybrid sensor systems might reuse the same aggregation tree for both domains.
- The bound could be tested on actual quantum hardware by injecting controlled Byzantine faults while varying the entanglement visibility parameter.
Load-bearing premise
Classical Byzantine fault-tolerance mechanisms and overlap functions extend directly to quantum sensors that are characterized only by entanglement visibility V and decoherence, without extra quantum constraints on how faults interact with entanglement.
What would settle it
A controlled experiment on a network of M quantum sensors with measured visibility V and a known fraction f of injected faults, checking whether the observed mean squared error stays above the formula (1-V^2)/(4*N*eta^2*M_eff) + V^2/(4*N*eta^2*M_eff^2) for the appropriate choice of M_eff.
Figures




read the original abstract
We derive unified lower bounds on the mean squared error (MSE) of distributed quantum sensor fusion under Byzantine faults and decoherence. Building on the classical Brooks-Iyengar overlap function and its vector extension, the predictive outlier model for virtual sensor tracking, and SPOTLESS spatial-temporal verification, we establish a two-parameter family of bounds indexed by entanglement visibility V and fault fraction f/M. For M quantum sensors with N atoms each and sensitivity eta, the MSE of any estimator satisfies MSE >= (1-V^2)/(4*N*eta^2*M_eff) + V^2/(4*N*eta^2*M_eff^2), where M_eff = M-2f under Brooks-Iyengar Byzantine fault tolerance and M_eff = M-f when predictive outlier detection successfully identifies faulty sensors. The bound interpolates continuously between the standard quantum limit (V=0, scaling as 1/sqrt(M_eff)) and the Heisenberg limit (V=1, scaling as 1/M_eff). Monte Carlo simulations with up to 64 sensors validate the theoretical scaling laws. Validation on the Intel Berkeley Lab 54-mote dataset with spatial clustering demonstrates 20-27 dB SNR improvement from entanglement per cluster, and reveals that missing classical sensor data degrades fusion agreement in the same pattern as quantum decoherence. The framework bridges quantum metrology with classical stream-processing architectures including Data-Cleaning Trees and the 80-20 Power Law for scale-invariant clustering.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper derives unified lower bounds on the mean squared error (MSE) of distributed quantum sensor fusion under Byzantine faults and decoherence. It extends the classical Brooks-Iyengar overlap function, its vector extension, the predictive outlier model, and SPOTLESS verification to quantum sensors with entanglement visibility V. For M sensors each with N atoms and sensitivity eta, it claims MSE >= (1-V^2)/(4*N*eta^2*M_eff) + V^2/(4*N*eta^2*M_eff^2), where M_eff = M-2f under Brooks-Iyengar tolerance or M-f under predictive outlier detection. The bound interpolates between the standard quantum limit (V=0) and Heisenberg limit (V=1). Monte Carlo simulations up to 64 sensors and validation on the Intel Berkeley Lab dataset are reported to confirm the scaling and SNR gains.
Significance. If the central bound is rigorously derived and the extension to entangled networks holds, the result would offer a useful interpolation between SQL and HL scalings in fault-prone quantum sensor networks, bridging quantum metrology with classical stream-processing techniques such as Data-Cleaning Trees. The explicit dependence on fault fraction f and visibility V could guide practical design of Byzantine-tolerant quantum sensing systems.
major comments (1)
- [Abstract and bound derivation (implicit in the two-parameter family construction)] The central bound is obtained by direct substitution of the classical M_eff = M-2f (or M-f) into both the (1-V^2) SQL term and the V^2 HL term. This substitution is load-bearing for the claimed continuous interpolation. However, the manuscript provides no derivation of the quantum Fisher information or the MSE bound when Byzantine faults can apply arbitrary local unitaries to entangled qubits (V>0). Such operations can degrade global entanglement or introduce non-classical noise beyond what the classical overlap function captures, potentially requiring extra error terms. This assumption is invoked without quantum-specific analysis of how faults interact with the entangled state.
minor comments (2)
- [Validation section] Monte Carlo validation up to 64 sensors is stated but lacks reported trial counts, error-bar methodology, or explicit exclusion criteria for the scaling-law checks.
- [Dataset experiments] The 20-27 dB SNR improvement on the Intel Berkeley Lab dataset is reported per cluster; a direct side-by-side table comparing entangled vs. classical fusion under identical missing-data patterns would strengthen the claim that missing classical data mimics decoherence.
Simulated Author's Rebuttal
We thank the referee for their thorough review and valuable comments on our work. Below we provide a point-by-point response to the major comment, outlining how we will strengthen the manuscript.
read point-by-point responses
-
Referee: The central bound is obtained by direct substitution of the classical M_eff = M-2f (or M-f) into both the (1-V^2) SQL term and the V^2 HL term. This substitution is load-bearing for the claimed continuous interpolation. However, the manuscript provides no derivation of the quantum Fisher information or the MSE bound when Byzantine faults can apply arbitrary local unitaries to entangled qubits (V>0). Such operations can degrade global entanglement or introduce non-classical noise beyond what the classical overlap function captures, potentially requiring extra error terms. This assumption is invoked without quantum-specific analysis of how faults interact with the entangled state.
Authors: We appreciate the referee pointing out the need for a more explicit quantum derivation. In the manuscript, the two-parameter family is obtained by combining the classical effective sensor count M_eff from Byzantine-tolerant algorithms with the standard quantum metrology bounds parameterized by visibility V. The classical algorithms (Brooks-Iyengar and predictive outlier) are used to select or weight the reliable sensors, after which the quantum fusion proceeds with the remaining M_eff sensors having entanglement visibility V. We argue that since the fault tolerance is applied at the classical data level, and assuming faulty sensors do not participate in the entangled state preparation (as they are identified as outliers), the standard QFI bounds apply directly to the effective network. Nevertheless, to address the concern rigorously, we will include an additional derivation in the revised manuscript that models the potential degradation of entanglement due to undetected faults and shows that the bound holds as a conservative estimate. This revision will be made in the theoretical analysis section. revision: yes
Circularity Check
Central MSE bound constructed by substituting classical Brooks-Iyengar M_eff into standard quantum metrology expression
specific steps
-
self citation load bearing
[Abstract]
"Building on the classical Brooks-Iyengar overlap function and its vector extension, the predictive outlier model for virtual sensor tracking, and SPOTLESS spatial-temporal verification, we establish a two-parameter family of bounds indexed by entanglement visibility V and fault fraction f/M. For M quantum sensors with N atoms each and sensitivity eta, the MSE of any estimator satisfies MSE >= (1-V^2)/(4*N*eta^2*M_eff) + V^2/(4*N*eta^2*M_eff^2), where M_eff = M-2f under Brooks-Iyengar Byzantine fault tolerance and M_eff = M-f when predictive outlier detection successfully identifies faulty sens"
The central lower-bound expression is formed by replacing M with the classically-derived M_eff inside both the (1-V^2) SQL term and the V^2 HL term. Because the paper invokes the Brooks-Iyengar framework (co-author Iyengar) as the source of M_eff without deriving the quantum metrology bound under Byzantine operations that could degrade global entanglement or visibility, the claimed interpolation reduces to the classical fault model rescaling the standard quantum expression by construction.
full rationale
The paper presents the MSE lower bound as a derived result that interpolates SQL and HL via visibility V, but the formula is obtained by inserting the effective sensor count M_eff (defined via Brooks-Iyengar overlap and predictive outlier rules) directly into the known projection-noise bound. This substitution is load-bearing for the claimed Byzantine tolerance and continuous scaling; the abstract explicitly states the bounds are built on the classical components without an independent quantum Fisher information derivation under adversarial unitaries. Monte Carlo and dataset validation provide external checks on scaling but do not verify the fault-to-entanglement mapping itself.
Axiom & Free-Parameter Ledger
free parameters (5)
- V
- f
- eta
- N
- M
axioms (2)
- domain assumption Brooks-Iyengar overlap function and its vector extension apply to quantum sensor measurements characterized by visibility V.
- domain assumption Predictive outlier model successfully identifies faulty sensors under decoherence, yielding M_eff = M-f.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MSE( ˆT) ≥ (1-V²)/(4N η² M_eff) + V²/(4N η² M_eff²) ... interpolates continuously between the standard quantum limit (V=0 ...) and the Heisenberg limit (V=1 ...)
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Building on the classical Brooks-Iyengar overlap function and its vector extension, the predictive outlier model ...
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Robust dis- tributed computing and sensing algorithm,
R. R. Brooks and S. S. Iyengar, “Robust dis- tributed computing and sensing algorithm,” Computer, vol. 29, no. 6, pp. 53–60, 1996
work page 1996
-
[2]
S. S. Iyengar and R. R. Brooks,Distributed Sensor Networks, 2nd ed. CRC Press, 2012
work page 2012
-
[3]
Simultane- ous localization and mapping: Part I,
H. Durrant-Whyte and T. Bailey, “Simultane- ous localization and mapping: Part I,”IEEE Robot. Autom. Mag., vol. 13, no. 2, pp. 99–110, 2006
work page 2006
-
[4]
Quantum-enhanced measurements: Beat- ing the standard quantum limit,
V. Giovannetti, S. Lloyd, and L. Maccone, “Quantum-enhanced measurements: Beat- ing the standard quantum limit,”Science, vol. 306, no. 5700, pp. 1330–1336, 2004
work page 2004
-
[5]
V. Giovannetti, S. Lloyd, and L. Mac- cone, “Quantum metrology,”Phys. Rev. Lett., vol. 96, p. 010401, 2006
work page 2006
-
[6]
Advances in quantum metrology,
V. Giovannetti, S. Lloyd, and L. Maccone, “Advances in quantum metrology,”Nature Photon., vol. 5, pp. 222–229, 2011
work page 2011
-
[7]
Quantum projection noise: Population fluctuations in two-level systems,
W. M. Itanoet al., “Quantum projection noise: Population fluctuations in two-level systems,” Phys. Rev. A, vol. 47, no. 5, pp. 3554–3570, 1993
work page 1993
-
[8]
Squeezed atomic states and projection noise in spectroscopy,
D. J. Winelandet al., “Squeezed atomic states and projection noise in spectroscopy,”Phys. Rev. A, vol. 50, no. 1, pp. 67–88, 1994
work page 1994
-
[9]
Entanglement on an optical atomic-clock transition,
E. Pedrozo-Peñafielet al., “Entanglement on an optical atomic-clock transition,”Nature, vol. 588, pp. 414–418, 2020
work page 2020
-
[10]
Distributed quantum sens- ing with mode-entangled spin-squeezed atomic states,
B. K. Maliaet al., “Distributed quantum sens- ing with mode-entangled spin-squeezed atomic states,”Nature, vol. 612, pp. 661–665, 2022
work page 2022
-
[11]
Fuzzy logic based sensor fusion,
C. Rama Murthy and V. Iyer, “Fuzzy logic based sensor fusion,” inProc. EUSFLAT, 2007
work page 2007
-
[12]
F-measure attribute performance with unreliable sensors,
V. Iyer and S. S. Iyengar, “F-measure attribute performance with unreliable sensors,” inProc. IEEE ICDM Workshop, 2011
work page 2011
-
[13]
SPOTLESS: Similarity patterns of trajecto- ries in label-less sensor streams,
V. Iyer, S. S. Iyengar, N. Pissinou, and D. Ren, “SPOTLESS: Similarity patterns of trajecto- ries in label-less sensor streams,” inProc. IEEE PerCom Workshops, 2013
work page 2013
-
[14]
Ensemble stream model for data- cleaning in sensor networks,
V. Iyer, “Ensemble stream model for data- cleaning in sensor networks,” Ph.D. disserta- tion, Florida International University, 2013
work page 2013
-
[15]
V. Iyer and S. Shetty, “Virtual sensor track- ing using Byzantine fault tolerance and predic- tive outlier model for complex tasks recogni- tion,” inProc. SPIE 9478, Modeling and Sim- ulation for Defense Systems and Applications X, p. 94780F, 2015
work page 2015
-
[16]
V. Iyer, S. Shetty, and S. S. Iyengar, “Statisti- cal methods in AI: Rare event learning using associative rules and higher-order statistics,” ISPRS Archives, vol. XL-3/W3, 2015
work page 2015
-
[17]
FARMS: Fusionable ambient re- newable MACS,
V. Iyer, S. S. Iyengar, V. Balakrishnan, and N. Srinivas, “FARMS: Fusionable ambient re- newable MACS,” inProc. IEEE SAS, 2009. 11
work page 2009
-
[18]
Distributed compressed sensing for sensor networks,
V. Iyer and V. Singh, “Distributed compressed sensing for sensor networks,” inCognitive Ra- dio and Interference Management: Technology and Strategy, IGI Global, 2010
work page 2010
-
[19]
Fast multi-modal reuse: Co-occurrence pre- trained deep learning models,
V. Iyer, A. Aved, T. B. Howlett, J. T. Carlo, A. Mehmood, N. Pissinou, and S. S. Iyengar, “Fast multi-modal reuse: Co-occurrence pre- trained deep learning models,” inProc. SPIE 10996, Real-Time Image Processing and Deep Learning, p. 109960A, 2019
work page 2019
-
[20]
Intel Lab Data: 54 sensors deployed in the Intel Berke- ley Research lab,
P. Bodik, W. Hong, C. Guestrin, S. Mad- den, M. Paskin, and R. Thibaux, “Intel Lab Data: 54 sensors deployed in the Intel Berke- ley Research lab,” 2004.https://db.csail. mit.edu/labdata/labdata.html
work page 2004
-
[21]
Training data compression algorithms and re- liability in large wireless sensor networks,
V. Iyer, G. Rama Murthy, and M. B. Srinivas, “Training data compression algorithms and re- liability in large wireless sensor networks,”Int. J. Smart Sensing Intell. Syst., vol. 1, no. 4, pp. 912–921, 2008. 12 Figure 7: From crisp sensor data (Table 1 of [16]) to quantum fusion. (a) Classical 8-sensor intervals with Brooks-Iyengar overlap. (b) Per-sensor ...
work page 2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.