Emcar: Embodied Controller for Animating Robots
Pith reviewed 2026-06-25 19:23 UTC · model grok-4.3
The pith
EMCAR lets artists program collaborative robot motions via puppetry and drawing without code.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
EMCAR is a novel software tool for programming robot motion that leverages the unique affordances of artistic practices such as puppetry and drawing to conceive, design, and program novel interactions and realize new use cases for HRI. The advantage of this no-code platform is that it expands creative applications for collaborative robots - putting robots directly in the hands of artists - and provides an inclusive environment that enables individuals with little or no technical backgrounds to engage meaningfully in collaborations and robotics research.
What carries the argument
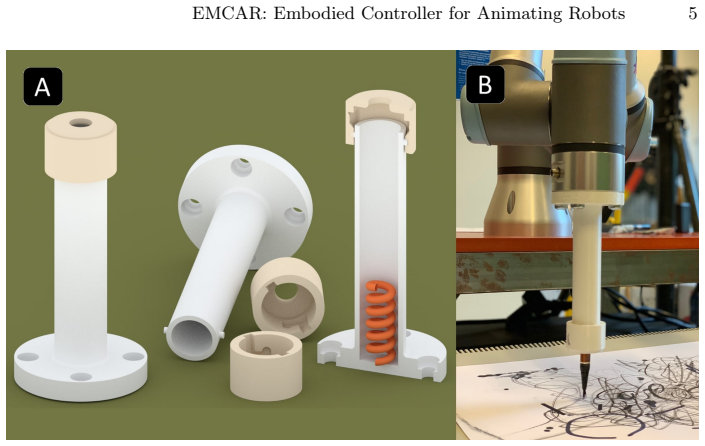
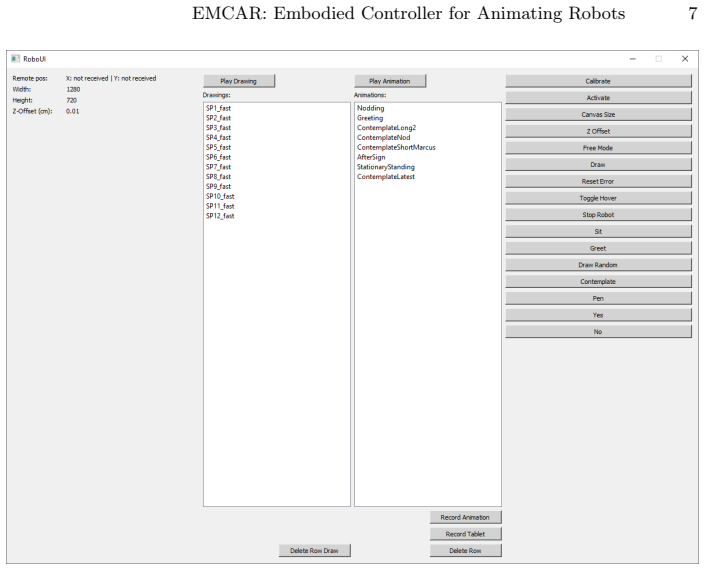
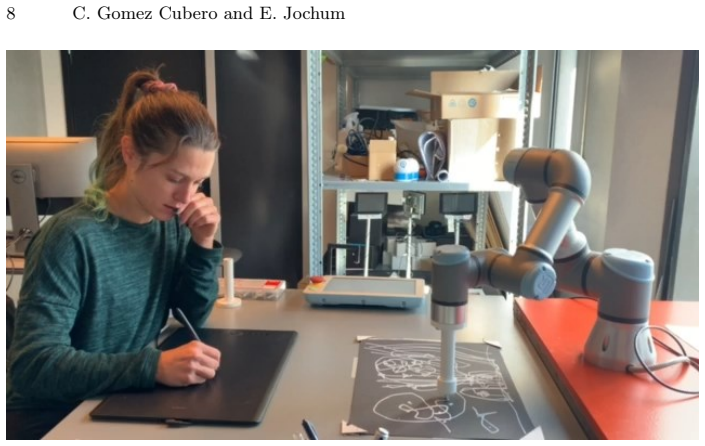
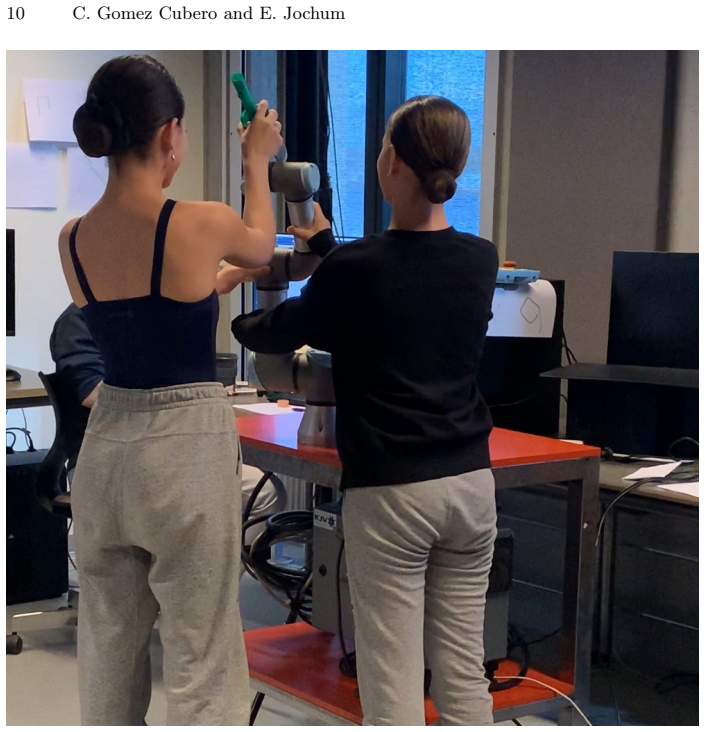
EMCAR, the embodied controller platform that converts artistic puppetry and drawing inputs into executable robot motion programs.
If this is right
- Artists can directly create and iterate on collaborative robot behaviors without programming knowledge.
- New HRI applications arise from design processes rooted in drawing and puppetry rather than code.
- Non-technical participants gain entry points into robotics research and creative collaborations.
- Collaborative robots become tools for artistic expression in addition to industrial or research tasks.
Where Pith is reading between the lines
- The approach might inspire hybrid art-robot performances that treat motion programming as performance.
- Wider use could shift robot interface design toward embodied input methods in education and industry.
- Future extensions could test whether the same inputs scale to multi-robot coordination or real-time improvisation.
Load-bearing premise
Artistic practices like puppetry and drawing supply unique ways to conceive robot motion that existing no-code interfaces do not replicate, and this produces meaningful engagement from non-technical users.
What would settle it
A controlled comparison in which non-technical users produce equivalent novelty and engagement levels with standard graphical robot interfaces as with EMCAR would undermine the claim of unique artistic affordances.
Figures


read the original abstract
This chapter describes EMCAR, a novel software tool for programming robot motion that leverages the unique affordances of artistic practices such as puppetry and drawing to conceive, design, and program novel interactions and realize new use cases for HRI. The advantage of this no-code platform is that it expands creative applications for collaborative robots - putting robots directly in the hands of artists - and provides an inclusive environment that enables individuals with little or no technical backgrounds to engage meaningfully in collaborations and robotics research.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes EMCAR, a no-code software tool for programming robot motion that draws on artistic practices such as puppetry and drawing. It claims these practices supply unique affordances that enable artists and non-technical users to conceive novel HRI interactions, expand creative applications for collaborative robots, and create an inclusive environment for robotics research.
Significance. If the tool demonstrably supplies affordances absent from existing graphical or no-code interfaces and produces measurable new use cases plus non-technical engagement, the work could broaden participation in HRI. The current manuscript, however, supplies only a descriptive account with no supporting data, so significance cannot be assessed from the provided text.
major comments (2)
- [Abstract] Abstract: The central assertions that artistic practices supply 'unique affordances' not replicated by existing no-code interfaces and that the tool produces 'meaningful engagement' by non-technical users are stated without any user studies, A/B comparisons against tools such as Blockly or Choregraphe, task metrics, engagement scales, or novelty scoring of resulting interactions.
- [Throughout the manuscript] Throughout: The manuscript contains no evaluation section, results, or quantitative/qualitative evidence to support the claims of expanded creative applications or new HRI use cases; the text remains a tool description whose load-bearing novelty and inclusivity statements therefore rest on unsupported assertions.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We acknowledge that the manuscript is a system description of the EMCAR tool and that its claims regarding unique affordances and meaningful non-technical engagement lack empirical support. We will revise the text to qualify these statements and add a limitations section.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central assertions that artistic practices supply 'unique affordances' not replicated by existing no-code interfaces and that the tool produces 'meaningful engagement' by non-technical users are stated without any user studies, A/B comparisons against tools such as Blockly or Choregraphe, task metrics, engagement scales, or novelty scoring of resulting interactions.
Authors: We agree that the abstract overstates the contributions without supporting data. The manuscript's intent is to present the tool's design and artistic inspirations as a conceptual platform. In the revised version we will rewrite the abstract to describe EMCAR's features and intended audience without asserting uniqueness or measurable engagement effects. revision: yes
-
Referee: [Throughout the manuscript] Throughout: The manuscript contains no evaluation section, results, or quantitative/qualitative evidence to support the claims of expanded creative applications or new HRI use cases; the text remains a tool description whose load-bearing novelty and inclusivity statements therefore rest on unsupported assertions.
Authors: The referee correctly identifies that the paper is a tool description without an evaluation component. As such, the novelty claims rest on the description of the interface rather than measured outcomes. We will add a 'Limitations and Future Work' section that explicitly notes the absence of user studies or comparisons and outlines planned empirical validation, thereby removing unsupported assertions from the main text. revision: yes
Circularity Check
No circularity; purely descriptive tool paper with no derivations or self-referential reductions
full rationale
The manuscript is a descriptive chapter introducing the EMCAR software tool. It contains no equations, derivations, fitted parameters, or mathematical claims. The central assertions about unique affordances of puppetry and drawing are presented directly as design motivations rather than derived from any internal chain or self-citation. No load-bearing step reduces to its own inputs by construction, and none of the six enumerated circularity patterns apply. The paper is therefore self-contained against external benchmarks with a circularity score of 0.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Artistic practices such as puppetry and drawing offer unique affordances for conceiving and programming robot interactions.
Reference graph
Works this paper leans on
-
[1]
Arts on Prescription: A review of practice in the UK , volume =
Bungay, Hilary and Clift, Stephen , address =. Arts on Prescription: A review of practice in the UK , volume =. Perspectives in Public Health , keywords =
-
[2]
The Robot is Present: : Creative Approaches for Artistic Expression With Robots , year =
Carlos Gomez Cubero and Maros Pekarik and Valeria Rizzo and Elizabeth Jochum , copyright =. The Robot is Present: : Creative Approaches for Artistic Expression With Robots , year =
-
[3]
Towards Creative Applications for Socially Assistive Robots
Hansen, Andreas Kornmaaler and Cristina Duna and Casandra Sandu and Elizabeth Jochum. Towards Creative Applications for Socially Assistive Robots. 2020
2020
-
[4]
and Christensen, Kristoffer W
Pedersen, Jonas E. and Christensen, Kristoffer W. and Herath, Damith and Jochum, Elizabeth. I Like the Way You Move: A Mixed-Methods Approach for Studying the Effects of Robot Motion on Collaborative Human Robot Interaction. Social Robotics. 2020
2020
-
[5]
Sequence and chance: Design and control methods for entertainment robots , year =
Jochum, Elizabeth and Millar, Philip and Nuñez, David , copyright =. Sequence and chance: Design and control methods for entertainment robots , year =. Robotics and autonomous systems , keywords =
-
[6]
A Proposed Wizard of OZ Architecture for a Human-Robot Collaborative Drawing Task
Hinwood, David and Ireland, James and Jochum, Elizabeth Ann and Herath, Damith. A Proposed Wizard of OZ Architecture for a Human-Robot Collaborative Drawing Task. Social Robotics. 2018
2018
-
[7]
Editorial: The Art of Human-Robot Interaction : Creative Perspectives From Design and the Arts , year =
Damith Herath and Elizabeth Jochum and David St-Onge , copyright =. Editorial: The Art of Human-Robot Interaction : Creative Perspectives From Design and the Arts , year =
-
[8]
Pedersen, Jonas E. and Christensen, Kristoffer W. and Herath, Damith and Jochum, Elizabeth , title =. Social Robotics: 12th International Conference, ICSR 2020, Golden, CO, USA, November 14–18, 2020, Proceedings , pages =. 2020 , isbn =. doi:10.1007/978-3-030-62056-1_7 , abstract =
-
[9]
Riek, Laurel D. , title =. J. Hum.-Robot Interact. , month = jul, pages =. 2012 , issue_date =. doi:10.5898/JHRI.1.1.Riek , abstract =
-
[10]
2012 , publisher=
How We Think: Digital Media and Contemporary Technogenesis , author=. 2012 , publisher=
2012
-
[11]
Elizabeth Jochum and Hansen, Andreas Kornmaaler and Cubero, Carlos Gomez. Creative Applications for Socially Assistive Robots to Support Mental-Health: A Participatory Pilot Study. Social Robotics. 2025. doi:10.1007/978-981-96-3525-2_19
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.