Global analysis of the Kuramoto flow
Pith reviewed 2026-05-25 05:17 UTC · model grok-4.3
The pith
The simplest all-to-all identical Kuramoto model has its global dynamics fully described geometrically via Morse theory, with most of the description stable under small perturbations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that for the Kuramoto equation with all identical oscillators and equal pairwise attraction, the global dynamics admit a full geometric description in terms of Morse theory and dynamical systems, and that most of this description is topologically preserved under small perturbations of the parameters.
What carries the argument
The Morse function on the phase space that generates the Kuramoto vector field as a gradient flow, organizing all equilibria, connecting orbits, and the global phase portrait.
If this is right
- Equilibria can be classified completely by their Morse indices and stability properties.
- The phase portrait consists of a finite number of attractors and repellers connected by heteroclinic orbits in a rigid topological pattern.
- Small changes in coupling strengths or frequencies do not alter the topological type of the flow.
- Synchronization behavior follows directly from the gradient descent on the Morse function without needing case-by-case simulation.
Where Pith is reading between the lines
- The same Morse-theoretic approach may apply to models with small frequency detuning, yielding nearly identical global portraits.
- Control strategies in power grids could exploit the stable equilibria identified by the Morse indices.
- Biological systems with slight heterogeneity might still inherit the robust synchronization thresholds from the ideal case.
Load-bearing premise
The simplest all-to-all identical-oscillator case admits a complete Morse-theoretic description of its flow on the state space without additional unstated restrictions on the manifold or the vector field.
What would settle it
A numerical integration or analytic counterexample in the identical all-to-all case that produces a periodic orbit or other trajectory incompatible with the predicted Morse gradient structure.
Figures









read the original abstract
Kuramoto's differential equation describes a synchronization process between several harmonic oscillators. It has been used to model biological phenomena such as the synchronization of heart cells, the circadian rhythm, or brain waves. It is also used in power system control. The simplest possible model assumes that all oscillators are identical and connected to each other with equal pairwise attraction. In this paper, we give a full geometric description of its global dynamics in terms of Morse theory and dynamical systems. Most of this description is stable in the sense that it is topologically preserved under small perturbations of the parameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript analyzes the all-to-all identical Kuramoto model on the n-torus, asserting a complete geometric description of its global dynamics via Morse theory: classification of equilibria by Morse index, connecting orbits, and the claim that most of this structure is preserved under small parameter perturbations (i.e., the flow is Morse-Smale for generic perturbations).
Significance. If the proofs are complete, this supplies an explicit Morse-theoretic global picture for the simplest Kuramoto system, which is the gradient flow of the standard cosine potential. Such a classification is useful as a baseline for synchronization models in biology and engineering; the structural-stability statement is a standard consequence of the Morse-Smale property holding generically on a compact manifold.
minor comments (3)
- The abstract and introduction should explicitly state the state space (T^n) and confirm that the vector field is the gradient of the potential V(θ) = −∑_{i<j} cos(θ_i − θ_j) with respect to the flat metric; this is implicit but not written out in the opening paragraphs.
- Section 3 (or wherever the index computation appears) should include a short table or list giving the Morse indices of the equilibria for small n (e.g., n=2,3) to make the global picture concrete before the general case.
- The perturbation-stability claim would be strengthened by a brief remark on the dimension of the unstable manifolds and why the transversality condition holds generically; this is standard but currently only alluded to.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript, the accurate summary of its contributions, and the recommendation for minor revision. The referee's description correctly identifies the core results on the Morse-theoretic classification of equilibria and connecting orbits for the all-to-all identical Kuramoto system, together with the structural stability under generic perturbations.
Circularity Check
No significant circularity; derivation is self-contained Morse-theoretic analysis
full rationale
The paper presents a mathematical description of the global dynamics of the all-to-all identical Kuramoto flow on the torus using standard Morse theory and dynamical systems tools. No fitted parameters, data-driven predictions, self-defined quantities, or load-bearing self-citations appear in the abstract or described claims. The central result is a classification of equilibria, connecting orbits, and structural stability under perturbation, which follows directly from the gradient structure of the cosine potential on a compact manifold without reducing to any input by construction. This is the expected non-circular outcome for a pure existence-and-classification theorem in dynamical systems.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel; cost_alpha_one_eq_jcost echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
The Perfect Morse potential M(Θ)=∑_{k=1}^u (1−cos θ_k). Its gradient is (sin θ_1,… ,sin θ_u)^T and the gradient flow of −M is the Perfect Morse flow… Cartesian product of u source/sink flows on the circle… θ′=−sinθ
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection; RCLCombiner_isCoupling_iff echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
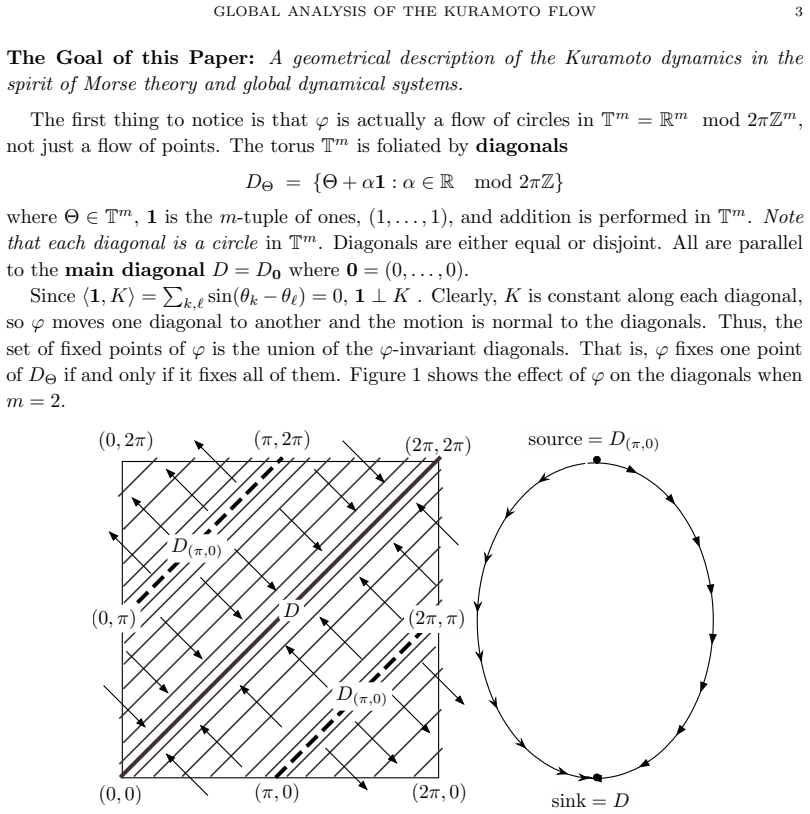
The flow of ψ in Q_I is topologically equivalent to the flow of the Perfect Morse potential M on T^d (Theorem 10.1)
-
IndisputableMonolith/Cost.leanJcost_unit0; Jcost_pos_of_ne_one echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
V(Θ)=(1−|Z|^2)m²/2 … minimum of V is zero … maximum m²/2
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.