Preserving Full 6-DOF Actuation Under Abrupt Total Rotor Failures: Passive Fault-Tolerant Flight Control Using a Biaxial-Tilt Hexacopter
Pith reviewed 2026-06-28 01:41 UTC · model grok-4.3
The pith
A biaxial-tilt hexacopter preserves full 6-DOF actuation after abrupt rotor failures using passive control that needs no fault detection.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
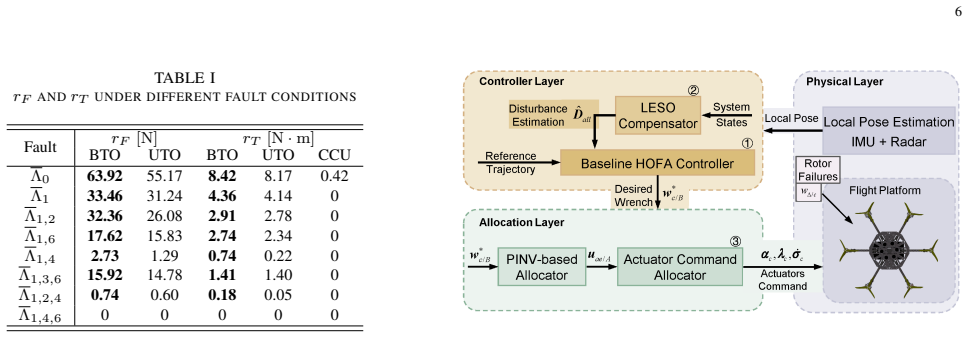
The biaxial-tilt hexacopter extends the inscribed-sphere metric of attainable wrench space by adding a transient-wrench-jump term, allowing quantitative assessment of feasibility under up to three simultaneous rotor failures. Passive fault tolerance is realized without fault detection, isolation, or mode switching through either a high-order fully actuated controller paired with a linear extended state observer or model-reference adaptive control allocation that compensates allocation biases via momentum-based estimation. Hardware experiments demonstrate that these schemes sustain stable operation and outperform alternative hexacopter configurations in recovery capability.
What carries the argument
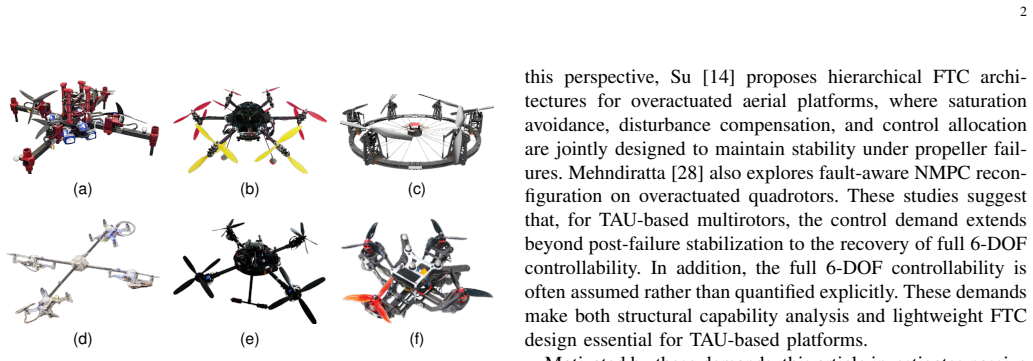
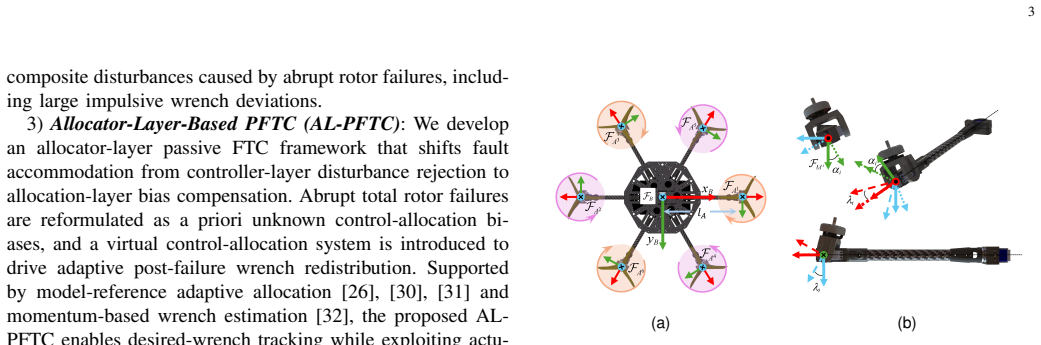
The biaxial-tilt overactuated hexacopter (BTO) configuration, which supplies redundant tilt axes so that the system remains fully actuated after representative rotor failures.
If this is right
- Stable hovering and 6-DOF trajectory tracking remain feasible under single and multiple rotor failures.
- The BTO provides larger recovery margins than uniaxial-tilt and coplanar hexacopters under the same failure scenarios.
- Onboard-sensor experiments show continued performance under wind disturbance, extreme outdoor conditions, narrow-frame traversal, and contact-based tasks.
Where Pith is reading between the lines
- The absence of explicit fault detection could simplify certification and reduce computational load for safety-critical multirotor applications.
- The same passive allocation and observer approach may transfer to other overactuated aerial platforms that retain full actuation after partial actuator loss.
- Quantitative wrench-margin comparisons could guide selection of tilt angles during the mechanical design of future redundant multirotors.
Load-bearing premise
The design and analysis apply only to specific abrupt rotor-failure cases where the remaining rotors leave the vehicle fully actuated, without any need to detect or identify the failures.
What would settle it
A hardware test in which the vehicle, after two or more rotors fail abruptly during hovering or trajectory tracking, loses stability or deviates from the commanded path under either of the proposed passive controllers.
Figures









read the original abstract
Conventional multirotors suffer from a rapid collapse of attainable wrench space (AWS) under abrupt total rotor failures, rendering full 6-DOF recovery physically impossible. This paper addresses passive fault-tolerant flight of a biaxial-tilt overactuated hexacopter (BTO) under abrupt total rotor failures that are a priori unknown to the controller. The control design and analysis focus on representative abrupt rotor-failure cases for which the post-failure system remains fully actuated, while no explicit fault detection, isolation, or fault-mode switching is assumed. First, we extend the inscribed-sphere metric of the AWS by incorporating the transient-wrench-jump term, enabling quantitative feasibility assessment under up to three simultaneous rotor failures and benchmarking against uniaxial-tilt and coplanar hexacopters. Second, we develop two computationally efficient passive schemes without relying on fault detection or online optimization. One scheme operates at the controller layer by combining a high-order fully actuated (HOFA) controller with a linear extended state observer (LESO) for lumped-disturbance rejection. The other scheme operates at the allocator layer by using model-reference adaptive control allocation with momentum-based wrench estimation to compensate for control-allocation biases. Simulations and flight experiments validate stable hovering and 6-DOF trajectory tracking under single and multiple rotor failures. Further systematic comparisons confirm that the BTO provides larger recovery margins than uniaxial-tilt and coplanar designs. Additional onboard-sensor-only experiments, including indoor tracking under wind disturbance, outdoor tracking under extreme conditions, narrow-frame traversal, and contact-based aerial writing, further validate the robustness of the proposed framework in complex operational environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a biaxial-tilt overactuated hexacopter (BTO) for passive fault-tolerant 6-DOF flight control under abrupt total rotor failures that remain unknown to the controller. It restricts analysis to representative cases where the post-failure system stays fully actuated, extends the inscribed-sphere AWS metric by adding a transient-wrench-jump term for quantitative assessment up to three failures, introduces two passive schemes (HOFA+LESO controller and model-reference adaptive allocation with momentum-based estimation), and reports validation via simulations and flight experiments for hovering, 6-DOF tracking, and comparisons showing larger recovery margins versus uniaxial-tilt and coplanar designs, plus additional robustness tests under wind, outdoor, and contact conditions.
Significance. If the experimental outcomes hold, the work provides a practical passive approach to maintaining full actuation after rotor failures without FDI or mode switching, which is valuable for UAV reliability. The metric extension enables direct benchmarking, the two-layer passive schemes are computationally efficient, and the multi-environment experiments (including wind disturbance and aerial writing) add credibility to the robustness claims. The scoped assumption on fully-actuated post-failure cases is explicitly stated and avoids over-extrapolation.
minor comments (2)
- [Abstract] Abstract: the validation claims are stated without any numerical results, error metrics, or failure-case definitions; adding one or two key quantitative outcomes (e.g., recovery margins or tracking RMSE) would strengthen the summary without altering the manuscript scope.
- [Metric extension section] The transient-wrench-jump term is introduced to extend the AWS metric, but its exact formulation and how it is computed from the allocation matrix should be cross-referenced to the relevant equation or appendix for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work on passive fault-tolerant 6-DOF control for the biaxial-tilt hexacopter and for recommending minor revision. No specific major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The paper introduces a biaxial-tilt hexacopter design, extends the inscribed-sphere AWS metric with a transient term, and proposes two passive control schemes (HOFA+LESO and adaptive allocation) without fault detection. These are validated via simulation and hardware experiments under scoped failure cases that preserve full actuation. No derivation step reduces by construction to a fitted parameter, self-defined quantity, or load-bearing self-citation; the central claims rest on the proposed architecture and external empirical outcomes rather than quantities defined in terms of the same data or prior author results.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Post-failure system remains fully actuated for the representative cases considered
Reference graph
Works this paper leans on
-
[1]
RACER: Rapid collaborative explo- ration with a decentralized multi-UA V system,
B. Zhou, H. Xu, and S. Shen, “RACER: Rapid collaborative explo- ration with a decentralized multi-UA V system,”IEEE Transactions on Robotics, vol. 39, no. 3, pp. 1816–1835, 2023
2023
-
[2]
Past, present, and future of aerial robotic manipulators,
A. Ollero, M. Tognon, A. Suarez, D. Lee, and A. Franchi, “Past, present, and future of aerial robotic manipulators,”IEEE Transactions on Robotics, vol. 38, no. 1, pp. 626–645, 2022
2022
-
[3]
Impact-aware planning and control for aerial robots with suspended payloads,
H. Wang, H. Li, B. Zhou, F. Gao, and S. Shen, “Impact-aware planning and control for aerial robots with suspended payloads,”IEEE Transac- tions on Robotics, vol. 40, pp. 2478–2497, 2024
2024
-
[4]
Design and optimal control of a tiltrotor mi- cro aerial vehicle for efficient omnidirectional flight,
M. Allenspach, K. Bodie, M. Brunner, L. Rinsoz, Z. Taylor, M. Kamel, R. Siegwart, and J. Nieto, “Design and optimal control of a tiltrotor mi- cro aerial vehicle for efficient omnidirectional flight,”The International Journal of Robotics Research, vol. 39, no. 10-11, pp. 1305–1325, 2020
2020
-
[5]
TiltDrone: A fully-actuated tilting quadrotor platform,
P. Zheng, X. Tan, B. B. Kocer, E. Yang, and M. Kovac, “TiltDrone: A fully-actuated tilting quadrotor platform,”IEEE Robotics and Automa- tion Letters, vol. 5, no. 4, pp. 6845–6852, 2020
2020
-
[6]
Optimal trajectory generation for time-to-contact based aerial robotic perching,
H. Zhang, B. Cheng, and J. Zhao, “Optimal trajectory generation for time-to-contact based aerial robotic perching,”Bioinspiration & Biomimetics, vol. 14, no. 1, p. 016008, 2019
2019
-
[7]
Controllability analysis for multirotor helicopter rotor degradation and failure,
G.-X. Du, Q. Quan, B. Yang, and K.-Y . Cai, “Controllability analysis for multirotor helicopter rotor degradation and failure,”Journal of Guidance, Control, and Dynamics, vol. 38, no. 5, pp. 978–985, 2015
2015
-
[8]
Uniform passive fault-tolerant control of a quadcopter with one, two, or three rotor failure,
C. Ke, K.-Y . Cai, and Q. Quan, “Uniform passive fault-tolerant control of a quadcopter with one, two, or three rotor failure,”IEEE Transactions on Robotics, vol. 39, no. 6, pp. 4297–4311, 2023
2023
-
[9]
Fundamental actuation proper- ties of multirotors: Force–moment decoupling and fail–safe robustness,
G. Michieletto, M. Ryll, and A. Franchi, “Fundamental actuation proper- ties of multirotors: Force–moment decoupling and fail–safe robustness,” IEEE Transactions on Robotics, vol. 34, no. 3, pp. 702–715, 2018
2018
-
[10]
Incremental nonlinear fault-tolerant control of a quadrotor with complete loss of two opposing rotors,
S. Sun, X. Wang, Q. Chu, and C. de Visser, “Incremental nonlinear fault-tolerant control of a quadrotor with complete loss of two opposing rotors,”IEEE Transactions on Robotics, vol. 37, no. 1, pp. 116–130, 2021
2021
-
[11]
Design and experimental validation of robust self-scheduled fault-tolerant control laws for a multicopter uav,
D.-T. Nguyen, D. Saussie, and L. Saydy, “Design and experimental validation of robust self-scheduled fault-tolerant control laws for a multicopter uav,”IEEE/ASME Transactions on Mechatronics, vol. 26, no. 5, pp. 2548–2557, 2021
2021
-
[12]
Servo integrated nonlinear model predictive control for overactuated tiltable-quadrotors,
J. Li, J. Sugihara, and M. Zhao, “Servo integrated nonlinear model predictive control for overactuated tiltable-quadrotors,”IEEE Robotics and Automation Letters, vol. 9, no. 10, pp. 8770–8777, 2024
2024
-
[13]
Modeling and control of FAST- Hex: A fully-actuated by synchronized-tilting hexarotor,
M. Ryll, D. Bicego, and A. Franchi, “Modeling and control of FAST- Hex: A fully-actuated by synchronized-tilting hexarotor,” in2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon, South Korea: IEEE, 2016, pp. 1689–1694
2016
-
[14]
Fault-tolerant control of an overactuated UA V platform built on quadcopters and passive hinges,
Y . Su, P. Yu, M. J. Gerber, L. Ruan, and T.-C. Tsao, “Fault-tolerant control of an overactuated UA V platform built on quadcopters and passive hinges,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 1, pp. 602–613, 2024
2024
-
[15]
Design, modeling, and control of a coaxial drone,
L. Chen, J. Xiao, Y . Zheng, N. A. Alagappan, and M. Feroskhan, “Design, modeling, and control of a coaxial drone,”IEEE Transactions on Robotics, vol. 40, pp. 1650–1663, 2024
2024
-
[16]
The voliro omniorientational hexa- copter: An agile and maneuverable tiltable-rotor aerial vehicle,
M. Kamel, S. Verling, O. Elkhatib, C. Sprecher, P. Wulkop, Z. Taylor, R. Siegwart, and I. Gilitschenski, “The voliro omniorientational hexa- copter: An agile and maneuverable tiltable-rotor aerial vehicle,”IEEE Robotics & Automation Magazine, vol. 25, no. 4, pp. 34–44, 2018
2018
-
[17]
Quadplus: Design, mod- eling, and receding-horizon-based control of a hyperdynamic quadrotor,
K. Singh, M. Mehndiratta, and M. Feroskhan, “Quadplus: Design, mod- eling, and receding-horizon-based control of a hyperdynamic quadrotor,” IEEE Transactions on Aerospace and Electronic Systems, vol. 58, no. 3, pp. 1766–1779, 2022
2022
-
[18]
A new overactuated multirotor: Prototype design, dynamics modeling, and control,
Y . Yang, X. Yu, Z. Li, and M. V . Basin, “A new overactuated multirotor: Prototype design, dynamics modeling, and control,”IEEE Transactions on Industrial Electronics, vol. 71, no. 8, pp. 9449–9459, 2024
2024
-
[19]
Full-pose tracking control for aerial robotic systems with laterally bounded input force,
A. Franchi, R. Carli, D. Bicego, and M. Ryll, “Full-pose tracking control for aerial robotic systems with laterally bounded input force,”IEEE Transactions on Robotics, vol. 34, no. 2, pp. 534–541, 2018
2018
-
[20]
Fail-safe flight of a fully-actuated quadrotor in a single motor failure,
S. J. Lee, I. Jang, and H. J. Kim, “Fail-safe flight of a fully-actuated quadrotor in a single motor failure,”IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6403–6410, 2020
2020
-
[21]
A survey of fault diagnosis and fault-tolerant techniques—part i: Fault diagnosis with model-based and signal-based approaches,
Z. Gao, C. Cecati, and S. X. Ding, “A survey of fault diagnosis and fault-tolerant techniques—part i: Fault diagnosis with model-based and signal-based approaches,”IEEE Transactions on Industrial Electronics, vol. 62, no. 6, pp. 3757–3767, 2015. 19
2015
-
[22]
Fault-tolerant control systems: A comparative study between active and passive approaches,
J. Jiang and X. Yu, “Fault-tolerant control systems: A comparative study between active and passive approaches,”Annual Reviews in Control, vol. 36, no. 1, pp. 60–72, 2012
2012
-
[23]
Passive fault-tolerant control via sliding-mode-based Lyapunov redesign,
M. A. Estrada, L. Fridman, and J. A. Moreno, “Passive fault-tolerant control via sliding-mode-based Lyapunov redesign,”IEEE Transactions on Automatic Control, vol. 69, no. 10, pp. 6777–6788, 2024
2024
-
[24]
Nonlinear MPC for quadrotor fault-tolerant control,
F. Nan, S. Sun, P. Foehn, and D. Scaramuzza, “Nonlinear MPC for quadrotor fault-tolerant control,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5047–5054, 2022
2022
-
[25]
Nullspace-based control allocation of overactuated UA V platforms,
Y . Su, P. Yu, M. J. Gerber, L. Ruan, and T.-C. Tsao, “Nullspace-based control allocation of overactuated UA V platforms,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8094–8101, 2021
2021
-
[26]
Adaptive control allocation for constrained systems,
S. S. Tohidi, Y . Yildiz, and I. Kolmanovsky, “Adaptive control allocation for constrained systems,”Automatica, vol. 121, p. 109161, 2020
2020
-
[27]
Downwash- aware control allocation for over-actuated UA V platforms,
Y . Su, C. Chu, M. Wang, J. Li, L. Yang, Y . Zhu, and H. Liu, “Downwash- aware control allocation for over-actuated UA V platforms,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 10 478–10 485
2022
-
[28]
Reced- ing horizon-based fault-tolerant control of quadplus: an over-actuated quadrotor,
M. Mehndiratta, K. Singh, E. Kayacan, and M. Feroskhan, “Reced- ing horizon-based fault-tolerant control of quadplus: an over-actuated quadrotor,” in2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), 2021, pp. 853–859
2021
-
[29]
Configuration optimization and distributed formation control for tethered multirotor UAS,
Y . Liu, F. Zhang, P. Huang, and Y . Lu, “Configuration optimization and distributed formation control for tethered multirotor UAS,”IEEE/ASME Transactions on Mechatronics, vol. 28, no. 6, pp. 3434–3445, 2023
2023
-
[30]
Discrete adaptive control allocation,
S. S. Tohidi and Y . Yildiz, “Discrete adaptive control allocation,” in 2021 American Control Conference (ACC). New Orleans, LA, USA: IEEE, 2021, pp. 3731–3736
2021
-
[31]
Adaptive fault tolerant flight control for input re- dundant systems using a nonlinear reference model,
H. Park and Y . Kim, “Adaptive fault tolerant flight control for input re- dundant systems using a nonlinear reference model,”IEEE Transactions on Aerospace and Electronic Systems, vol. 57, no. 5, pp. 3337–3356, 2021
2021
-
[32]
External wrench estimation, colli- sion detection, and reflex reaction for flying robots,
T. Tomi ´c, C. Ott, and S. Haddadin, “External wrench estimation, colli- sion detection, and reflex reaction for flying robots,”IEEE Transactions on Robotics, vol. 33, no. 6, pp. 1467–1482, 2017
2017
-
[33]
High-order fully actuated system approaches: Part iii. robust control and high-order backstepping,
G. Duan, “High-order fully actuated system approaches: Part iii. robust control and high-order backstepping,”International Journal of Systems Science, vol. 52, no. 5, pp. 952–971, 2021
2021
-
[34]
Capabilities of extended state observer for estimating uncertainties,
X. Yang and Y . Huang, “Capabilities of extended state observer for estimating uncertainties,” in2009 American Control Conference. St. Louis, MO, USA: IEEE, 2009, pp. 3700–3705
2009
-
[35]
Adaptive output feedback based on closed-loop reference models,
T. E. Gibson, Z. Qu, A. M. Annaswamy, and E. Lavretsky, “Adaptive output feedback based on closed-loop reference models,”IEEE Trans- actions on Automatic Control, vol. 60, no. 10, pp. 2728–2733, 2015
2015
-
[36]
FAST-LIVO2: Fast, direct LiDAR–inertial–visual odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhu, Y . Ren, R. Wang, F. Meng, and F. Zhang, “FAST-LIVO2: Fast, direct LiDAR–inertial–visual odometry,”IEEE Transactions on Robotics, vol. 41, pp. 326–346, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.