ShapeGrasp: Simultaneous Visuo-Haptic Shape Completion and Grasping for Improved Robot Manipulation
Pith reviewed 2026-07-01 07:57 UTC · model grok-4.3
The pith
Robots refine 3D object shapes using tactile data from grasps to raise success rates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that coupling implicit surface visuo-haptic shape completion with physics-based grasp planning produces an iterative pipeline in which each executed grasp supplies tactile surface contacts and gripper body space that are fused back into the shape model. This update yields measurably better 3D reconstructions and directly improves the quality of subsequent grasp candidates. The pipeline is shown to outperform baselines on two real robots and two gripper types, and it is presented as the first method demonstrated to update shape representations after real-world grasps.
What carries the argument
The iterative grasp-and-complete pipeline that fuses tactile surface contacts and gripper body space into an implicit surface visuo-haptic shape model.
If this is right
- Fusing grasp-derived geometric constraints improves 3D shape reconstruction quality across all evaluation metrics.
- Grasp success reaches 84 percent with a three-finger gripper and 91 percent with a two-finger gripper while outperforming baselines.
- Grasp failures are handled by re-estimating object pose and re-planning with the refined shape model.
- The approach works across different robots and grippers without requiring perfect initial visual data.
Where Pith is reading between the lines
- If the fusion step remains stable across object classes, the method could reduce the need for high-resolution initial sensors in cluttered scenes.
- The closed-loop structure suggests that interaction data collected during routine manipulation could be reused to maintain or improve shape models over time.
- Extending the same fusion step to include slip or force measurements might further tighten the link between updated shape and grasp stability.
Load-bearing premise
Tactile surface contacts and gripper body space obtained from real grasps can be fused accurately into the implicit surface model to produce a measurably better 3D representation that directly improves grasp planning.
What would settle it
A side-by-side trial in which adding the post-grasp tactile and occupancy data produces no gain in reconstruction metrics or grasp success rate compared with the initial visual estimate alone would falsify the claim.
Figures



read the original abstract
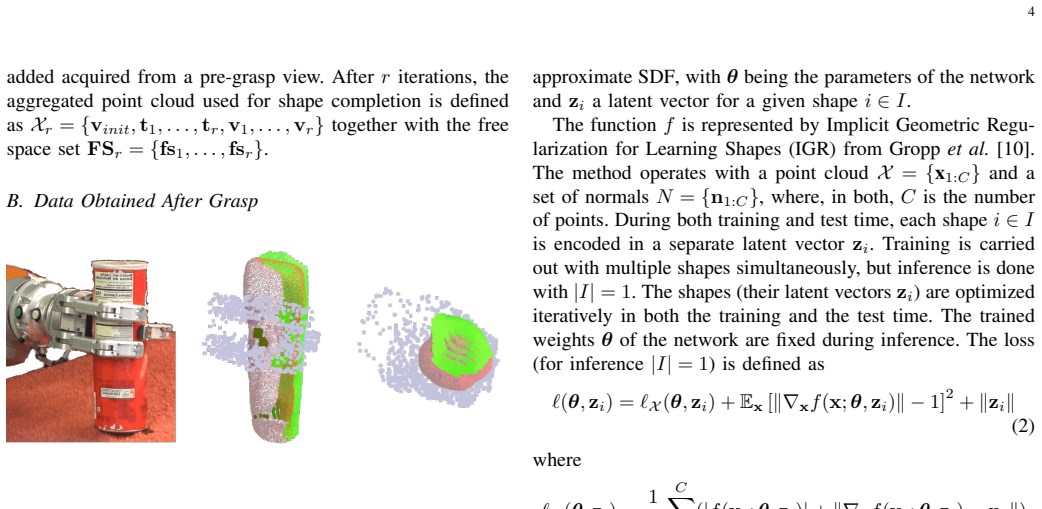
Humans grasp unfamiliar objects by combining an initial visual estimate with tactile and proprioceptive feedback during interaction. We present ShapeGrasp, a robotic implementation of this approach. The proposed method is an iterative grasp-and-complete pipeline that couples implicit surface visuo-haptic shape completion (creation of full 3D shape from partial information) with physics-based grasp planning. From a single RGB-D view, ShapeGrasp infers a complete shape (point cloud or triangular mesh), generates candidate grasps via rigid-body simulation, and executes the best feasible grasp. Each grasp attempt yields additional geometric constraints -- tactile surface contacts and space occupied by the gripper body -- which are fused to update the object shape. Failures trigger pose re-estimation and regrasping using the refined shape. We evaluate ShapeGrasp in the real world using two different robots and grippers. To the best of our knowledge, this is the first approach that updates shape representations following a real-world grasp. We achieved superior results over baselines for both grippers (grasp success rate of 84% with a three-finger gripper and 91% with a two-finger gripper), while improving the 3D shape reconstruction quality in all evaluation metrics used.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents ShapeGrasp, a method for simultaneous visuo-haptic shape completion and grasping. The approach involves an iterative pipeline: from a single RGB-D view, it performs implicit surface completion to infer the full 3D shape, uses physics-based simulation for grasp planning, executes the grasp on a robot, and upon failure fuses tactile surface contacts and gripper body occupancy to update the shape representation for re-planning. The authors claim this is the first method to update shape representations following a real-world grasp and report grasp success rates of 84% with a three-finger gripper and 91% with a two-finger gripper, superior to baselines, along with improvements in 3D shape reconstruction metrics.
Significance. If the reported improvements are substantiated with rigorous experimental validation, this work could contribute to the field of robotic manipulation by demonstrating a practical closed-loop system that refines object shape models using haptic feedback from grasps. The real-world evaluation across two different grippers is a positive aspect. The integration of implicit representations with physics simulation and real execution has potential for broader applications in handling unknown objects.
major comments (1)
- [Abstract] Abstract: The abstract claims quantitative improvements in grasp success rates (84% and 91%) and shape reconstruction quality over baselines, but provides no information on the number of trials conducted, the implementation details of the baseline methods, any statistical tests used to validate the results, or the precise algorithm for fusing the tactile and gripper data into the implicit model. This absence makes it impossible to assess whether the reported success rates support the central claim of improved manipulation through shape updating.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for major revision. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract claims quantitative improvements in grasp success rates (84% and 91%) and shape reconstruction quality over baselines, but provides no information on the number of trials conducted, the implementation details of the baseline methods, any statistical tests used to validate the results, or the precise algorithm for fusing the tactile and gripper data into the implicit model. This absence makes it impossible to assess whether the reported success rates support the central claim of improved manipulation through shape updating.
Authors: We agree that the abstract is high-level and omits these specifics, which are instead provided in the body of the manuscript (experimental protocol and trial counts in Section 4, baseline descriptions in Section 3.3, fusion procedure in Section 3.2). Abstracts are constrained by length and typically focus on contributions and headline results rather than full methodology. The central claim is supported by the detailed experiments and real-world evaluation across two grippers described in the paper. To address the concern directly, we will revise the abstract to include a concise reference to the scale of the real-world trials and the iterative fusion of tactile contacts with gripper occupancy. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper describes an empirical iterative pipeline (RGB-D completion, physics-based grasp planning, real execution, post-grasp fusion of tactile contacts and gripper occupancy into an implicit visuo-haptic model) evaluated on two robots/grippers. Reported outcomes are direct experimental metrics (84%/91% grasp success, improved reconstruction scores) with no equations, loss functions, fitted parameters, or predictions that reduce to input definitions. No self-citation chains, uniqueness theorems, or ansatzes are invoked to support the central claim. The mechanism is a standard occupancy fusion step inside an implicit surface representation, making the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Coding and use of tactile signals from the fingertips in object manipulation tasks,
R. S. Johansson and J. R. Flanagan, “Coding and use of tactile signals from the fingertips in object manipulation tasks,”Nature Reviews Neuroscience, vol. 10, no. 5, pp. 345–359, 2009
2009
-
[2]
Active perception,
R. Bajcsy, “Active perception,”Proceedings of the IEEE, vol. 76, no. 8, pp. 966–1005, 1988
1988
-
[3]
Example-based 3D Scan Completion,
M. Pauly, N. J. Mitra, J. Giesen, M. H. Gross, and L. J. Guibas, “Example-based 3D Scan Completion,” inSymposium on Geometry Processing, no. CONF, 2005, pp. 23–32
2005
-
[4]
Completion and Reconstruction with Primitive Shapes,
R. Schnabel, P. Degener, and R. Klein, “Completion and Reconstruction with Primitive Shapes,” inComputer Graphics F orum, vol. 28, no. 2. Wiley Online Library, 2009, pp. 503–512
2009
-
[5]
Mind the gap-robotic grasping under incomplete observation,
J. Bohg, M. Johnson-Roberson, B. Le ´on, J. Felip, X. Gratal, N. Bergstr ¨om, D. Kragic, and A. Morales, “Mind the gap-robotic grasping under incomplete observation,” in2011 IEEE International Conference on Robotics and Automation. IEEE, 2011, pp. 686–693
2011
-
[6]
Shape Completion Enabled Robotic Grasping,
J. Varley, C. DeChant, A. Richardson, J. Ruales, and P. Allen, “Shape Completion Enabled Robotic Grasping,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sep. 2017, pp. 2442–2447
2017
-
[7]
Robust Grasp Planning Over Un- certain Shape Completions,
J. Lundell, F. Verdoja, and V . Kyrki, “Robust Grasp Planning Over Un- certain Shape Completions,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nov. 2019, pp. 1526–1532
2019
-
[8]
DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation,
J. J. Park, P. Florence, J. Straub, R. Newcombe, and S. Lovegrove, “DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation,” in2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, Jun. 2019, pp. 165–174
2019
-
[9]
SAL: Sign Agnostic Learning of Shapes From Raw Data,
M. Atzmon and Y . Lipman, “SAL: Sign Agnostic Learning of Shapes From Raw Data,” in2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, Jun. 2020, pp. 2562–2571
2020
-
[10]
Implicit Geometric Regularization for Learning Shapes,
A. Gropp, L. Yariv, N. Haim, M. Atzmon, and Y . Lipman, “Implicit Geometric Regularization for Learning Shapes,” inInternational Con- ference on Machine Learning. PMLR, Nov. 2020, pp. 3789–3799
2020
-
[11]
GASCN: Graph Attention Shape Completion Network,
H. Huang, Z. Yang, and R. Platt, “GASCN: Graph Attention Shape Completion Network,” in2021 International Conference on 3D Vision (3DV). IEEE, 2021, pp. 1269–1278
2021
-
[12]
To- wards Confidence-guided Shape Completion for Robotic Applications,
A. Rosasco, S. Berti, F. Bottarel, M. Colledanchise, and L. Natale, “To- wards Confidence-guided Shape Completion for Robotic Applications,” in2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), 2022, pp. 580–586
2022
-
[13]
ShapeFormer: Transformer-Based Shape Completion via Sparse Rep- resentation,
X. Yan, L. Lin, N. J. Mitra, D. Lischinski, D. Cohen-Or, and H. Huang, “ShapeFormer: Transformer-Based Shape Completion via Sparse Rep- resentation,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 6239–6249
2022
-
[14]
3DSGrasp: 3D Shape-Completion for Robotic Grasp,
S. S. Mohammadi, N. F. Duarte, D. Dimou, Y . Wang, M. Taiana, P. Morerio, A. Dehban, P. Moreno, A. Bernardino, A. Del Bue, and J. Santos-Victor, “3DSGrasp: 3D Shape-Completion for Robotic Grasp,” in2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023, pp. 3815–3822
2023
-
[15]
Local Implicit Surface Estimation for Haptic Exploration,
S. Ottenhaus, M. Miller, D. Schiebener, N. Vahrenkamp, and T. Asfour, “Local Implicit Surface Estimation for Haptic Exploration,” in2016 IEEE-RAS 16th International Conference on Humanoid Robots (Hu- manoids), Nov. 2016, pp. 850–856
2016
-
[16]
Active Tactile Object Exploration with Gaussian Processes,
Z. Yi, R. Calandra, F. Veiga, H. van Hoof, T. Hermans, Y . Zhang, and J. Peters, “Active Tactile Object Exploration with Gaussian Processes,” in2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2016, pp. 4925–4930
2016
-
[17]
Active Learning with Query Paths for Tactile Object Shape Exploration,
D. Driess, P. Englert, and M. Toussaint, “Active Learning with Query Paths for Tactile Object Shape Exploration,” in2017 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), Sep. 2017, pp. 65–72
2017
-
[18]
Uncertainty aware grasping and tactile exploration,
S. Dragiev, M. Toussaint, and M. Gienger, “Uncertainty aware grasping and tactile exploration,” in2013 IEEE International Conference on Robotics and Automation, 2013, pp. 113–119
2013
-
[19]
Improving Haptic Exploration of Object Shape by Discovering Symmetries,
A. A. Bonzini, L. Seminara, and L. Jamone, “Improving Haptic Exploration of Object Shape by Discovering Symmetries,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 5821–5827
2022
-
[20]
Robotic Haptic Exploration of Object Shape With Autonomous Sym- metry Detection,
A. A. Bonzini, L. Seminara, S. Macci `o, A. Carf `ı, and L. Jamone, “Robotic Haptic Exploration of Object Shape With Autonomous Sym- metry Detection,”IEEE Transactions on Robotics, vol. 41, 2025
2025
-
[21]
Object Shape Estimation and Modeling, Based on Sparse Gaussian Pro- cess Implicit Surfaces, Combining Visual Data and Tactile Exploration,
G. Z. Gandler, C. H. Ek, M. Bj ¨orkman, R. Stolkin, and Y . Bekiroglu, “Object Shape Estimation and Modeling, Based on Sparse Gaussian Pro- cess Implicit Surfaces, Combining Visual Data and Tactile Exploration,” Robotics and Autonomous Systems, vol. 126, p. 103433, 2020
2020
-
[22]
Visuo-Haptic Grasping of Unknown Objects Based on Gaussian Pro- cess Implicit Surfaces and Deep Learning,
S. Ottenhaus, D. Renninghoff, R. Grimm, F. Ferreira, and T. Asfour, “Visuo-Haptic Grasping of Unknown Objects Based on Gaussian Pro- cess Implicit Surfaces and Deep Learning,” in2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Oct. 2019, pp. 402–409
2019
-
[23]
Enhancing Visual Perception of Shape through Tactile Glances,
M. Bj ¨orkman, Y . Bekiroglu, V . H ¨ogman, and D. Kragic, “Enhancing Visual Perception of Shape through Tactile Glances,” in2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nov. 2013, pp. 3180–3186
2013
-
[24]
ShapeMap 3-D: Efficient shape mapping through dense touch and vision,
S. Suresh, Z. Si, J. G. Mangelson, W. Yuan, and M. Kaess, “ShapeMap 3-D: Efficient shape mapping through dense touch and vision,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 7073–7080
2022
-
[25]
Multi-Modal Geometric Learning for Grasping and Manipulation,
D. Watkins-Valls, J. Varley, and P. Allen, “Multi-Modal Geometric Learning for Grasping and Manipulation,” in2019 International Confer- ence on Robotics and Automation (ICRA), May 2019, pp. 7339–7345
2019
-
[26]
3D Shape Perception from Monocular Vision, Touch, and Shape Priors,
S. Wang, J. Wu, X. Sun, W. Yuan, W. T. Freeman, J. B. Tenenbaum, and E. H. Adelson, “3D Shape Perception from Monocular Vision, Touch, and Shape Priors,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2018, pp. 1606–1613
2018
-
[27]
3D Shape Reconstruction from Vision and Touch,
E. Smith, R. Calandra, A. Romero, G. Gkioxari, D. Meger, J. Malik, and M. Drozdzal, “3D Shape Reconstruction from Vision and Touch,” inAdvances in Neural Information Processing Systems, vol. 33, 2020, pp. 14 193–14 206
2020
-
[28]
Active 3D Shape Reconstruction from Vision and Touch,
E. Smith, D. Meger, L. Pineda, R. Calandra, J. Malik, A. Romero Sori- ano, and M. Drozdzal, “Active 3D Shape Reconstruction from Vision and Touch,”Advances in Neural Information Processing Systems, vol. 34, 2021
2021
-
[29]
Deep Active Cross-Modal Visuo-Tactile Transfer Learning for Robotic Object Recognition,
P. K. Murali, C. Wang, D. Lee, R. Dahiya, and M. Kaboli, “Deep Active Cross-Modal Visuo-Tactile Transfer Learning for Robotic Object Recognition,”IEEE Robotics and Automation Letters, vol. 7, pp. 9557– 9564, 10 2022
2022
-
[30]
Active Visuo-Haptic Object Shape Completion,
L. Rustler, J. Lundell, J. K. Behrens, V . Kyrki, and M. Hoffmann, “Active Visuo-Haptic Object Shape Completion,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5254–5261, Apr. 2022
2022
-
[31]
Efficient Visuo-Haptic Object Shape Completion for Robot Manipulation,
L. Rustler, J. Matas, and M. Hoffmann, “Efficient Visuo-Haptic Object Shape Completion for Robot Manipulation,” in2023 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2023, pp. 3121–3128
2023
-
[32]
On the Closure Properties of Robotic Grasping,
A. Bicchi, “On the Closure Properties of Robotic Grasping,”The International Journal of Robotics Research, vol. 14, no. 4, pp. 319– 334, Aug. 1995
1995
-
[33]
Mechanics of Form Closure,
B. Dizio ˘glu and K. Lakshiminarayana, “Mechanics of Form Closure,” Acta Mechanica, vol. 52, no. 1, pp. 107–118, Jul. 1984
1984
-
[34]
On Computing Three-Finger Force- Closure Grasps of 2-D and 3-D Objects,
J.-W. Li, H. Liu, and H.-G. Cai, “On Computing Three-Finger Force- Closure Grasps of 2-D and 3-D Objects,”IEEE Transactions on Robotics and Automation, vol. 19, no. 1, pp. 155–161, Feb. 2003
2003
-
[35]
Constructing Stable Grasps in 3D,
V .-D. Nguyen, “Constructing Stable Grasps in 3D,” in1987 IEEE International Conference on Robotics and Automation Proceedings, vol. 4, Mar. 1987, pp. 234–239
1987
-
[36]
Planning Optimal Grasps,
C. Ferrari and J. Canny, “Planning Optimal Grasps,”Proceedings - IEEE International Conference on Robotics and Automation, vol. 3, pp. 2290– 2295, 1992
1992
-
[37]
GraspIt!
A. Miller and P. Allen, “GraspIt!”IEEE Robotics & Automation Mag- azine, vol. 11, no. 4, pp. 110–122, Dec. 2004
2004
-
[38]
Deep Learning for Detecting Robotic Grasps,
I. Lenz, H. Lee, and A. Saxena, “Deep Learning for Detecting Robotic Grasps,”The International Journal of Robotics Research, vol. 34, no. 4-5, pp. 705–724, Apr. 2015
2015
-
[39]
Grasp Pose Detection in Point Clouds,
A. ten Pas, M. Gualtieri, K. Saenko, and R. Platt, “Grasp Pose Detection in Point Clouds,”The International Journal of Robotics Research, vol. 36, no. 13-14, pp. 1455–1473, Dec. 2017
2017
-
[40]
PointNetGPD: Detecting Grasp Configurations from Point Sets,
H. Liang, X. Ma, S. Li, M. G ¨orner, S. Tang, B. Fang, F. Sun, and J. Zhang, “PointNetGPD: Detecting Grasp Configurations from Point Sets,” in2019 International Conference on Robotics and Automation (ICRA), May 2019, pp. 3629–3635
2019
-
[41]
Dex-Net 1.0: A cloud-based network of 3D objects for robust grasp planning using a Multi-Armed Bandit model with correlated rewards,
J. Mahler, F. T. Pokorny, B. Hou, M. Roderick, M. Laskey, M. Aubry, K. Kohlhoff, T. Kr ¨oger, J. Kuffner, and K. Goldberg, “Dex-Net 1.0: A cloud-based network of 3D objects for robust grasp planning using a Multi-Armed Bandit model with correlated rewards,” in2016 IEEE International Conference on Robotics and Automation (ICRA), May 2016, pp. 1957–1964. 15
2016
-
[42]
DexDiffuser: Generating Dexterous Grasps With Diffusion Models,
Z. Weng, H. Lu, D. Kragic, and J. Lundell, “DexDiffuser: Generating Dexterous Grasps With Diffusion Models,”IEEE Robotics and Automa- tion Letters, vol. 9, no. 12, pp. 11 834–11 840, Dec. 2024
2024
-
[43]
DefGraspNets: Grasp Planning on 3D Fields with Graph Neural Nets,
I. Huang, Y . Narang, R. Bajcsy, F. Ramos, T. Hermans, and D. Fox, “DefGraspNets: Grasp Planning on 3D Fields with Graph Neural Nets,” in2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023, pp. 5894–5901
2023
-
[44]
Contact- GraspNet: Efficient 6-DoF Grasp Generation in Cluttered Scenes,
M. Sundermeyer, A. Mousavian, R. Triebel, and D. Fox, “Contact- GraspNet: Efficient 6-DoF Grasp Generation in Cluttered Scenes,” in2021 IEEE International Conference on Robotics and Automation (ICRA), May 2021, pp. 13 438–13 444
2021
-
[45]
DefGraspSim: Physics-Based Simulation of Grasp Outcomes for 3D Deformable Objects,
I. Huang, Y . Narang, C. Eppner, B. Sundaralingam, M. Macklin, R. Ba- jcsy, T. Hermans, and D. Fox, “DefGraspSim: Physics-Based Simulation of Grasp Outcomes for 3D Deformable Objects,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6274–6281, Jul. 2022
2022
-
[46]
A Novel Simulation-Based Quality Metric for Evaluating Grasps on 3D De- formable Objects,
T. N. Le, J. Lundell, F. J. Abu-Dakka, and V . Kyrki, “A Novel Simulation-Based Quality Metric for Evaluating Grasps on 3D De- formable Objects,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2022, pp. 3123–3129
2022
-
[47]
Measuring Uncertainty in Shape Completion to Improve Grasp Quality,
N. F. Duarte, S. S. Mohammadi, P. Moreno, A. D. Bue, and J. Santos- Victor, “Measuring Uncertainty in Shape Completion to Improve Grasp Quality,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2025, pp. 17 696–17 702, iSSN: 2153- 0866
2025
-
[48]
Learning Continuous 3D Reconstructions for Geometrically Aware Grasping,
M. Van der Merwe, Q. Lu, B. Sundaralingam, M. Matak, and T. Her- mans, “Learning Continuous 3D Reconstructions for Geometrically Aware Grasping,” in2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020, pp. 11 516–11 522, iSSN: 2577- 087X
2020
-
[49]
Robotic Grasping through Combined Image-Based Grasp Proposal and 3D Reconstruc- tion,
D. Yang, T. Tosun, B. Eisner, V . Isler, and D. Lee, “Robotic Grasping through Combined Image-Based Grasp Proposal and 3D Reconstruc- tion,” in2021 IEEE International Conference on Robotics and Automa- tion (ICRA), May 2021, pp. 6350–6356, iSSN: 2577-087X
2021
-
[50]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 770–778
2016
-
[51]
Higher-order function networks for learning composable 3d object representations,
E. Mitchell, K. S. Engin, V . Isler, and D. D. Lee, “Higher-order function networks for learning composable 3d object representations,” in8th International Conference on Learning Representations, ICLR 2020, 2020
2020
-
[52]
Combining Shape Completion and Grasp Prediction for Fast and Versatile Grasping with a Multi-Fingered Hand,
M. Humt, D. Winkelbauer, U. Hillenbrand, and B. B ¨auml, “Combining Shape Completion and Grasp Prediction for Fast and Versatile Grasping with a Multi-Fingered Hand,” in2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), Dec. 2023, pp. 1–8, iSSN: 2164-0580
2023
-
[53]
Simultaneous Tactile Exploration and Grasp Refinement for Unknown Objects,
C. de Farias, N. Marturi, R. Stolkin, and Y . Bekiroglu, “Simultaneous Tactile Exploration and Grasp Refinement for Unknown Objects,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3349–3356, Apr. 2021
2021
-
[54]
Task-Informed Grasping of Partially Observed Objects,
C. de Farias, B. Tamadazte, M. Adjigble, R. Stolkin, and N. Marturi, “Task-Informed Grasping of Partially Observed Objects,”IEEE Robotics and Automation Letters, vol. 9, no. 10, pp. 8394–8401, Oct. 2024
2024
-
[55]
Marching cubes: A high resolution 3d surface construction algorithm,
W. E. Lorensen and H. E. Cline, “Marching cubes: A high resolution 3d surface construction algorithm,” inProceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, ser. SIGGRAPH ’87. New York, NY , USA: Association for Computing Machinery, 1987, p. 163–169
1987
-
[56]
Grounding dino: Marrying dino with grounded pre-training for open-set object detection,
S. Liu, Z. Zeng, T. Ren, F. Li, H. Zhang, J. Yang, Q. Jiang, C. Li, J. Yang, H. Suet al., “Grounding dino: Marrying dino with grounded pre-training for open-set object detection,” inEuropean conference on computer vision. Springer, 2024, pp. 38–55
2024
-
[57]
SAM 2: Segment anything in images and videos,
N. Ravi, V . Gabeur, Y .-T. Hu, R. Hu, C. Ryali, T. Ma, H. Khedr, R. R ¨adle, C. Rolland, L. Gustafson, E. Mintun, J. Pan, K. V . Alwala, N. Carion, C.-Y . Wu, R. Girshick, P. Dollar, and C. Feichtenhofer, “SAM 2: Segment anything in images and videos,” inThe Thirteenth International Conference on Learning Representations, 2025
2025
-
[58]
A method for registration of 3-d shapes,
P. Besl and N. D. McKay, “A method for registration of 3-d shapes,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 14, no. 2, pp. 239–256, 1992
1992
-
[59]
PyBullet, a Python module for physics simulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “PyBullet, a Python module for physics simulation for games, robotics and machine learning,” http://pybullet.org, 2016–2021
2016
-
[60]
Kaolin: A Pytorch Library for Accelerating 3D Deep Learning Research
C. Fuji Tsang, M. Shugrina, J. F. Lafleche, O. Perel, C. Loop, T. Takikawa, V . Modi, A. Zook, J. Wang, W. Chen, T. Shen, J. Gao, K. M. Jatavallabhula, E. Smith, A. Rozantsev, S. Fidler, G. State, J. Gorski, T. Xiang, J. Li, M. Li, and R. Lebaredian, “Kaolin: A Pytorch Library for Accelerating 3D Deep Learning Research.” [Online]. Available: https://githu...
-
[61]
The YCB object and Model set: Towards common benchmarks for manipulation research,
B. Calli, A. Singh, A. Walsman, S. Srinivasa, P. Abbeel, and A. M. Dol- lar, “The YCB object and Model set: Towards common benchmarks for manipulation research,” in2015 International Conference on Advanced Robotics (ICAR), 2015, pp. 510–517
2015
-
[62]
Interactive learning of physical object properties through robot manipulation and database of object measurements,
A. Kruzliak, J. Hartvich, S. P. Patni, L. Rustler, J. K. Behrens, F. J. Abu-Dakka, K. Mikolajczyk, V . Kyrki, and M. Hoffmann, “Interactive learning of physical object properties through robot manipulation and database of object measurements,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 7596– 7603
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.