Bridging Spherical Black-Box Optimizers
Pith reviewed 2026-06-25 20:30 UTC · model grok-4.3
The pith
ES, CBO and OVI black-box optimizers differ mainly by fitness aggregation and consensus scope, enabling hybrids that interpolate their behaviors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
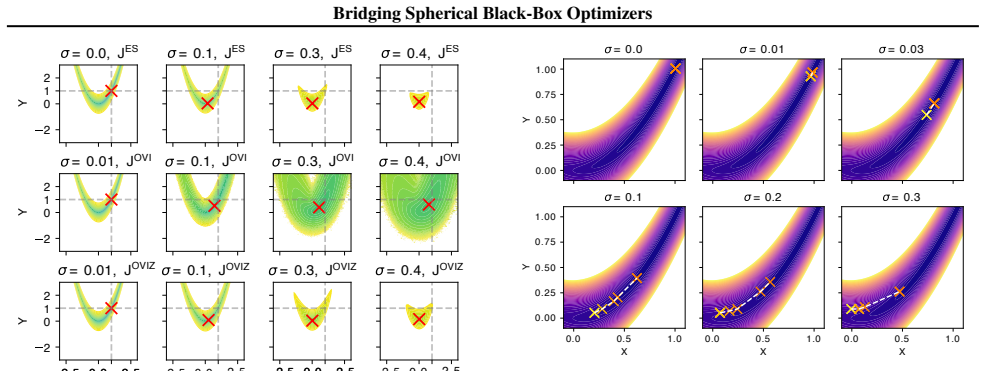
We unify these approaches within a common theoretical framework, revealing that they differ primarily in two design choices: fitness aggregation (controlling sharpness preference) and consensus scope (controlling modality). Leveraging these insights, we introduce hybrid optimizers that interpolate between existing methods.
What carries the argument
The two design axes of fitness aggregation and consensus scope that parameterize a family of spherical black-box optimizers and allow construction of interpolating hybrids.
If this is right
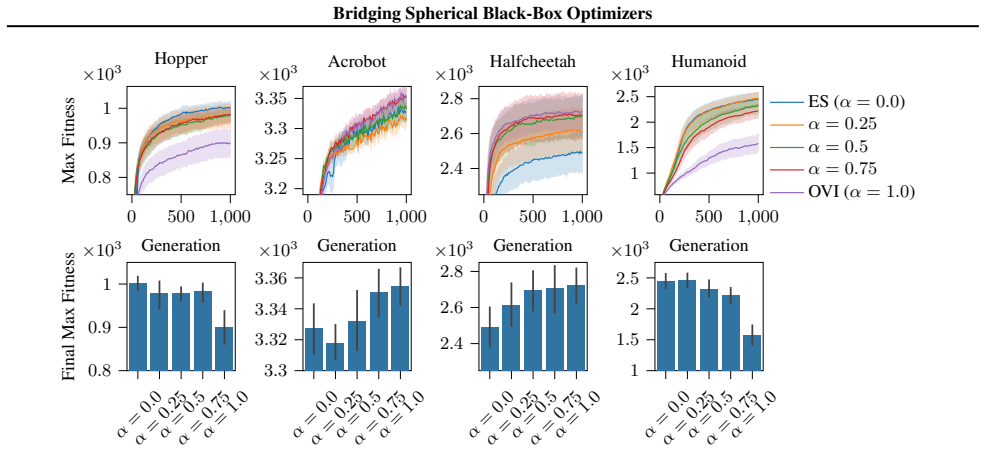
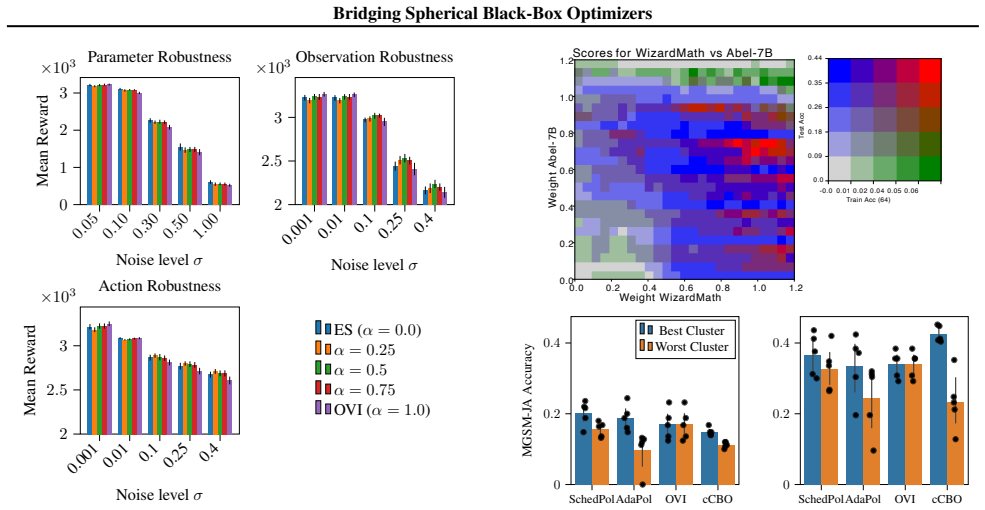
- ES-OVI hybrids give explicit control over preference for flat minima and thereby trade performance against robustness on continuous control tasks.
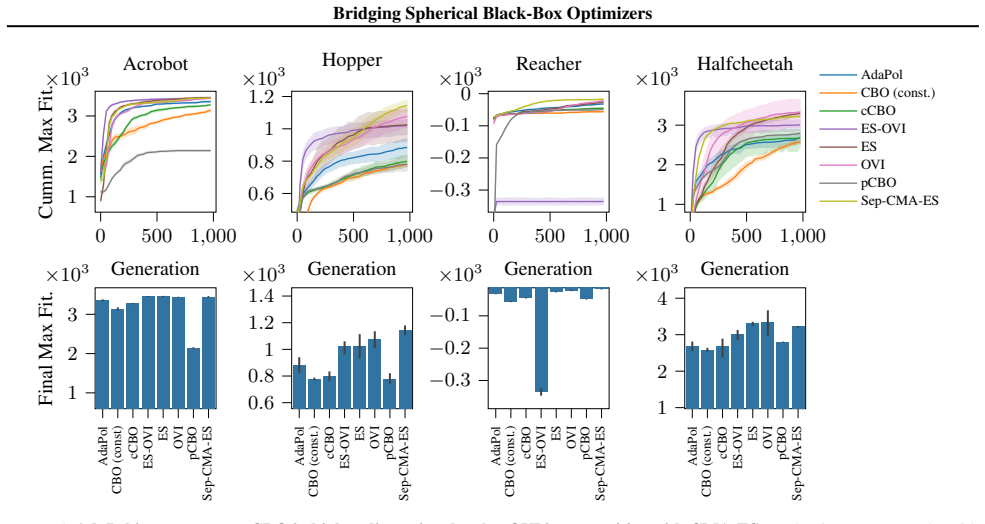
- CBO-OVI hybrids combine the sample efficiency of parametric updates with the multimodal search of particle methods, producing competitive results on language-model merging under tight evaluation limits.
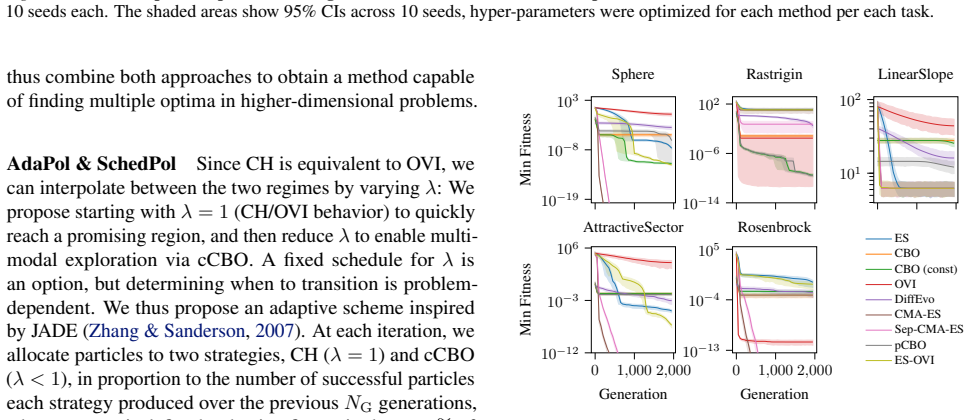
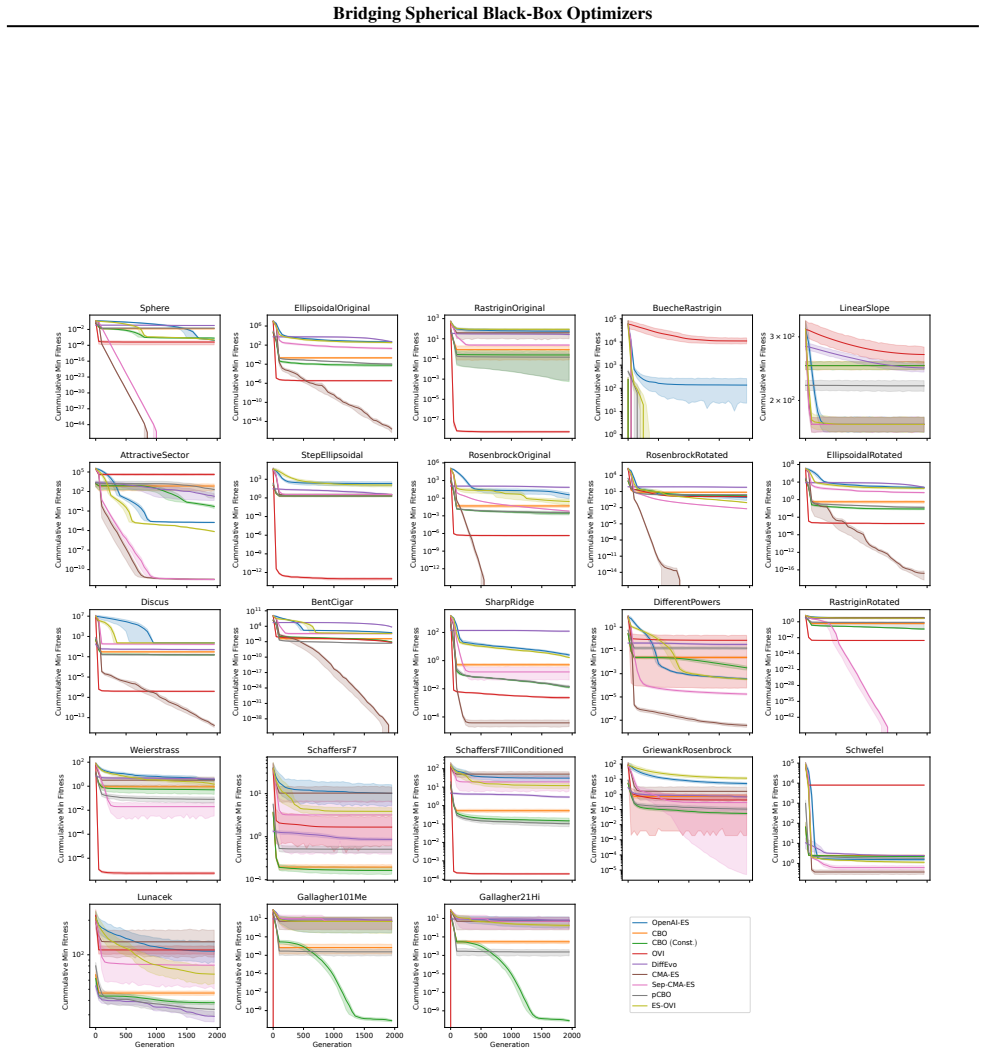
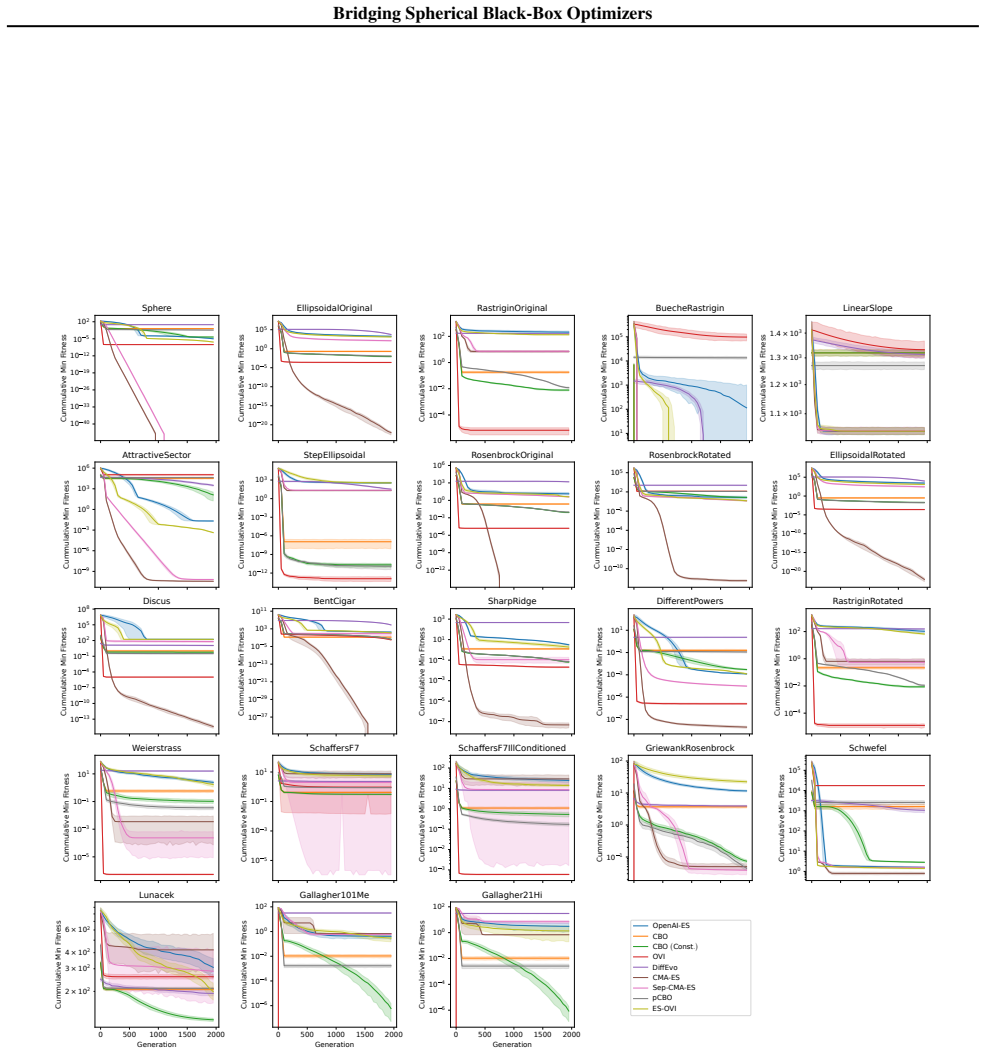
- On standard BBO benchmarks and higher-dimensional locomotion tasks the hybrids can outperform the original constituent algorithms.
Where Pith is reading between the lines
- If the two-axis view is complete, the same parameterization could be used to generate additional hybrids that target other trade-offs not yet explored in the paper.
- The framework suggests that tuning aggregation and scope separately may offer a more interpretable alternative to hand-crafted optimizer variants for new problem classes.
- Extending the unification to methods outside the spherical family could reveal whether similar axes govern their design choices.
Load-bearing premise
The main distinctions among ES, CBO, OVI and related methods are captured exactly by the two axes of fitness aggregation and consensus scope.
What would settle it
A controlled test in which an ES-OVI or CBO-OVI hybrid loses a core property of one parent method that cannot be restored by any setting of the two axes.
Figures





read the original abstract
When gradient information is unavailable, black-box optimization (BBO) methods provide a practical alternative. While Evolution Strategies (ES), Consensus-Based Optimization (CBO), Optimization via Integration (OVI), and related methods have each been studied independently, their connections remain underexplored. We unify these approaches within a common theoretical framework, revealing that they differ primarily in two design choices: fitness aggregation (controlling sharpness preference) and consensus scope (controlling modality). Leveraging these insights, we introduce hybrid optimizers that interpolate between existing methods. Our ES-OVI hybrid allows explicit control over the preference for flat minima, enabling a trade-off between performance and robustness in continuous control tasks. Our CBO-OVI hybrids combine the higher-dimensional efficiency of parametric methods with the multimodal capabilities of particle-based approaches, achieving competitive results on language model merging under limited evaluation budgets. We validate our methods on standard BBO benchmarks and higher-dimensional locomotion tasks, demonstrating that the hybrid methods can outperform their constituent algorithms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to unify Evolution Strategies (ES), Consensus-Based Optimization (CBO), Optimization via Integration (OVI) and related spherical black-box methods in a common theoretical framework. The unification identifies two primary design axes—fitness aggregation (governing sharpness preference) and consensus scope (governing modality)—as the main distinctions among the methods. It then constructs hybrid optimizers (ES-OVI and CBO-OVI) that interpolate along these axes, with the ES-OVI hybrid providing explicit control over flat-minima preference and the CBO-OVI hybrids combining parametric efficiency with particle-based multimodality. Empirical results on standard BBO benchmarks and higher-dimensional locomotion tasks are reported to show that the hybrids can outperform their constituent algorithms.
Significance. If the two-axis unification is shown to be faithful and the hybrids preserve the essential properties of the source methods while delivering the claimed trade-offs, the work would offer a principled route to designing new black-box optimizers. This could be particularly useful for continuous-control and high-dimensional tasks where robustness to modality and preference for flat minima matter, and where evaluation budgets are limited.
major comments (2)
- [Abstract / §3 (theoretical framework)] The central unification claim rests on the assertion that ES, CBO and OVI differ primarily along the two axes of fitness aggregation and consensus scope. Without explicit mappings (e.g., how the update rules or objective functionals of each method are recovered as special cases of the proposed framework), it is impossible to verify whether the hybrids truly interpolate without losing essential algorithmic properties.
- [§4 (hybrid construction) and experimental section] The ES-OVI hybrid is said to enable explicit control over flat-minima preference. The manuscript should demonstrate that this control is achieved without introducing additional free parameters beyond those already present in the constituent methods, and that the resulting performance-robustness trade-off is not an artifact of hyper-parameter tuning.
minor comments (2)
- [Abstract] The abstract refers to “spherical” black-box optimizers; the manuscript should clarify whether this refers to a specific geometric constraint on the search space or is simply descriptive of the methods considered.
- [Experimental results] When reporting outperformance on locomotion tasks, the number of independent runs, statistical significance tests, and exact evaluation budgets should be stated explicitly so that the claimed superiority of the hybrids can be assessed.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We address the two major comments below and will revise the manuscript accordingly to strengthen the presentation of the unification and the hybrid constructions.
read point-by-point responses
-
Referee: [Abstract / §3 (theoretical framework)] The central unification claim rests on the assertion that ES, CBO and OVI differ primarily along the two axes of fitness aggregation and consensus scope. Without explicit mappings (e.g., how the update rules or objective functionals of each method are recovered as special cases of the proposed framework), it is impossible to verify whether the hybrids truly interpolate without losing essential algorithmic properties.
Authors: We agree that explicit recovery of the base methods would make the unification more verifiable. Section 3 already frames the two axes and derives the general update, but we will add a dedicated subsection with the precise algebraic mappings showing how the standard ES, CBO, and OVI update rules (and their objective functionals) arise as special cases. This will also confirm that the proposed hybrids remain within the same family and preserve the core algorithmic properties. revision: yes
-
Referee: [§4 (hybrid construction) and experimental section] The ES-OVI hybrid is said to enable explicit control over flat-minima preference. The manuscript should demonstrate that this control is achieved without introducing additional free parameters beyond those already present in the constituent methods, and that the resulting performance-robustness trade-off is not an artifact of hyper-parameter tuning.
Authors: The flat-minima preference in ES-OVI is governed by the fitness-aggregation parameter already present in both base methods; no new free parameters are introduced. We will revise §4 to include an explicit parameter-correspondence table and add targeted ablation experiments in which only the aggregation parameter is varied while all other hyperparameters remain fixed at the values used for the constituent algorithms. These results will be reported to show that the observed trade-off is attributable to the design axis rather than additional tuning. revision: yes
Circularity Check
No significant circularity; unification framework is self-contained
full rationale
The paper's central claim is a unification of ES, CBO, OVI and related methods via two axes (fitness aggregation and consensus scope), followed by construction of hybrid optimizers. The provided abstract and text contain no equations, no fitted parameters renamed as predictions, no self-citations invoked as load-bearing uniqueness theorems, and no derivations that reduce outputs to inputs by construction. The framework is presented as an organizing lens that enables interpolation, without any step where the claimed differences or hybrids are defined circularly in terms of themselves. This is the normal case of an independent conceptual contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Evolutionary optimization of model merging recipes
Akiba, T., Shing, M., Tang, Y., Sun, Q., and Ha, D. Evolutionary optimization of model merging recipes. Nature Machine Intelligence, 7: 0 195--204, 2025
2025
-
[2]
Gradient-free optimization via integration, 2024
Andrieu, C., Chopin, N., Fincato, E., and Gerber, M. Gradient-free optimization via integration, 2024. URL https://arxiv.org/abs/2408.00888
arXiv 2024
-
[3]
shisa-gamma-7b-v1, 2023
augmxnt. shisa-gamma-7b-v1, 2023. URL https://huggingface.co/augmxnt/shisa-gamma-7b-v1
2023
-
[4]
J., Leary, C., Maclaurin, D., Necula, G., Paszke, A., Vander P las, J., Wanderman- M ilne, S., and Zhang, Q
Bradbury, J., Frostig, R., Hawkins, P., Johnson, M. J., Leary, C., Maclaurin, D., Necula, G., Paszke, A., Vander P las, J., Wanderman- M ilne, S., and Zhang, Q. JAX : composable transformations of P ython+ N um P y programs, 2018. URL http://github.com/jax-ml/jax
2018
-
[5]
V., Lange, R
Braun, C. V., Lange, R. T., and Toussaint, M. Stein Variational Evolution Strategies . In UAI . arXiv, 2025. URL https://proceedings.mlr.press/v286/braun25a.html
2025
-
[6]
Polarized consensus-based dynamics for optimization and sampling
Bungert, L., Roith, T., and Wacker, P. Polarized consensus-based dynamics for optimization and sampling. Mathematical Programming, 211: 0 125--155, 2025
2025
-
[7]
A., Jin, S., Li, L., and Zhu, Y
Carrillo, J. A., Jin, S., Li, L., and Zhu, Y. A consensus-based global optimization method for high dimensional machine learning problems. ESAIM: Control, Optimisation and Calculus of Variations, 27: 0 S5, 2021
2021
-
[8]
Generative ai for math: Abel
Chern, E., Zou, H., Li, X., Hu, J., Feng, K., Li, J., and Liu, P. Generative ai for math: Abel. https://github.com/GAIR-NLP/abel, 2023
2023
-
[9]
Sharpness- Aware Minimization for Efficiently Improving Generalization
Foret, P., Kleiner, A., Mobahi, H., and Neyshabur, B. Sharpness- Aware Minimization for Efficiently Improving Generalization . In ICLR , 2021
2021
-
[10]
D., Frey, E., Raichuk, A., Girgin, S., Mordatch, I., and Bachem, O
Freeman, C. D., Frey, E., Raichuk, A., Girgin, S., Mordatch, I., and Bachem, O. Brax -- A Differentiable Physics Engine for Large Scale Rigid Body Simulation . In NeurIPS Datasets and Benchmarks Track, 2021
2021
-
[11]
The language model evaluation harness, 07 2024
Gao, L., Tow, J., Abbasi, B., Biderman, S., Black, S., DiPofi, A., Foster, C., Golding, L., Hsu, J., Le Noac'h, A., Li, H., McDonell, K., Muennighoff, N., Ociepa, C., Phang, J., Reynolds, L., Schoelkopf, H., Skowron, A., Sutawika, L., Tang, E., Thite, A., Wang, B., Wang, K., and Zou, A. The language model evaluation harness, 07 2024. URL https://zenodo.or...
arXiv 2024
-
[12]
Monte Carlo Methods in Financial Engineering , volume 53 of Stochastic Modelling and Applied Probability
Glasserman, P. Monte Carlo Methods in Financial Engineering , volume 53 of Stochastic Modelling and Applied Probability. Springer, New York, 2004
2004
-
[13]
Glynn, P. W. Likelihood ratio gradient estimation for stochastic systems. Commun. ACM, 33 0 (10): 0 75--84, 1990
1990
-
[14]
The CMA Evolution Strategy : A Tutorial , 2016
Hansen, N. The CMA Evolution Strategy : A Tutorial , 2016. URL https://arxiv.org/abs/1604.00772
Pith/arXiv arXiv 2016
-
[15]
Real- Parameter Black - Box Optimization Benchmarking 2009: Noiseless Functions Definitions
Hansen, N., Finck, S., Ros, R., and Auger, A. Real- Parameter Black - Box Optimization Benchmarking 2009: Noiseless Functions Definitions . Research Report RR-6829, INRIA, 2009. URL https://inria.hal.science/inria-00362633
2009
-
[16]
and Schmidhuber, J
Hochreiter, S. and Schmidhuber, J. Flat Minima . Neural Computation, 9 0 (1): 0 1--42, 1997
1997
-
[17]
T., Wortsman, M., Gururangan, S., Schmidt, L., Hajishirzi, H., and Farhadi, A
Ilharco, G., Ribeiro, M. T., Wortsman, M., Gururangan, S., Schmidt, L., Hajishirzi, H., and Farhadi, A. Editing Models with Task Arithmetic . In ICLR , 2023
2023
-
[18]
Q., Sablayrolles, A., Mensch, A., Bamford, C., Chaplot, D
Jiang, A. Q., Sablayrolles, A., Mensch, A., Bamford, C., Chaplot, D. S., Casas, D. d. l., Bressand, F., Lengyel, G., Lample, G., Saulnier, L., Lavaud, L. R., Lachaux, M.-A., Stock, P., Scao, T. L., Lavril, T., Wang, T., Lacroix, T., and Sayed, W. E. Mistral 7B , 2023. URL https://arxiv.org/abs/2310.06825
Pith/arXiv arXiv 2023
-
[19]
Katkovnik, V. Ya . and Kulchitsky, O. Yu . Convergence of a Class of Random Search Algorithms . Automation and Remote Control, 33: 0 1321--1326, 1972
1972
-
[20]
Lange, R. T. evosax: Jax-based evolution strategies, 2022. URL https://arxiv.org/abs/2212.04180
arXiv 2022
-
[21]
T., Schaul, T., Chen, Y., Zahavy, T., Dallibard, V., Lu, C., Singh, S., and Flennerhag, S
Lange, R. T., Schaul, T., Chen, Y., Zahavy, T., Dallibard, V., Lu, C., Singh, S., and Flennerhag, S. Discovering Evolution Strategies via Meta - Black - Box Optimization . In ICLR , 2023. URL https://openreview.net/forum?id=mFDU0fP3EQH
2023
-
[22]
Lee, H. K. and Yoon, S. W. Flat Reward in Policy Parameter Space Implies Robust Reinforcement Learning . In ICLR , 2025. URL https://openreview.net/forum?id=4OaO3GjP7k
2025
-
[23]
Wizardmath: Empowering mathematical reasoning for large language models via reinforced evol-instruct
Luo, H., Sun, Q., Xu, C., Zhao, P., Lou, J., Tao, C., Geng, X., Lin, Q., Chen, S., and Zhang, D. Wizardmath: Empowering mathematical reasoning for large language models via reinforced evol-instruct. In ICRL, 2025. URL https://openreview.net/forum?id=mMPMHWOdOy
2025
-
[24]
R., Crisostomi, D., Santilli, A., and Rodolà, E
Mencattini, T., Minut, A. R., Crisostomi, D., Santilli, A., and Rodolà, E. MERGE \ 3\ : Efficient Evolutionary Merging on Consumer -grade GPUs . In ICML, 2025. URL https://proceedings.mlr.press/v267/mencattini25a.html
2025
-
[25]
Metz, L., Freeman, C. D., Schoenholz, S. S., and Kachman, T. Gradients are Not All You Need , 2022. URL http://arxiv.org/abs/2111.05803
arXiv 2022
-
[26]
and Spokoiny, V
Nesterov, Y. and Spokoiny, V. Random gradient-free minimization of convex functions. Foundations of Computational Mathematics, 17 0 (2): 0 527--566, 2017
2017
-
[27]
Information- Geometric Optimization Algorithms : A Unifying Picture via Invariance Principles
Ollivier, Y., Arnold, L., Auger, A., and Hansen, N. Information- Geometric Optimization Algorithms : A Unifying Picture via Invariance Principles . JMLR, 2017. URL https://jmlr.org/papers/v18/14-467.html
2017
-
[28]
A consensus-based model for global optimization and its mean-field limit
Pinnau, R., Totzeck, C., Tse, O., and Martin, S. A consensus-based model for global optimization and its mean-field limit. Mathematical Models and Methods in Applied Sciences, 27 0 (1): 0 183--204, 2017
2017
-
[29]
Evolutionsstrategie: Optimierung technischer Systeme nach Prinzipien der biologischen Evolution
Rechenberg, I. Evolutionsstrategie: Optimierung technischer Systeme nach Prinzipien der biologischen Evolution . Problemata, 15. Frommann-Holzboog, Stuttgart-Bad Cannstatt, 1973. ISBN 978-3-7728-0373-4
1973
-
[30]
Gradient is All You Need ?, 2023
Riedl, K., Klock, T., Geldhauser, C., and Fornasier, M. Gradient is All You Need ?, 2023. URL https://arxiv.org/abs/2306.09778
arXiv 2023
-
[31]
How Consensus - Based Optimization can be Interpreted as a Stochastic Relaxation of Gradient Descent
Riedl, K., Klock, T., Geldhauser, C., and Fornasier, M. How Consensus - Based Optimization can be Interpreted as a Stochastic Relaxation of Gradient Descent . In Differentiable Almost Everything Workshop , ICML 2024 , 2024
2024
-
[32]
An automatic method for finding the greatest or least value of a function
Rosenbrock, H. An automatic method for finding the greatest or least value of a function. The computer journal, 3 0 (3): 0 175--184, 1960
1960
-
[33]
Rubinstein, R. Y. The score function approach for sensitivity analysis of computer simulation models. Mathematics and Computers in Simulation, 28 0 (5): 0 351--379, 1986
1986
-
[34]
Evolution Strategies as a Scalable Alternative to Reinforcement Learning , 2017
Salimans, T., Ho, J., Chen, X., Sidor, S., and Sutskever, I. Evolution Strategies as a Scalable Alternative to Reinforcement Learning , 2017. URL https://arxiv.org/abs/1703.03864
Pith/arXiv arXiv 2017
-
[35]
W., Tay, Y., Ruder, S., Zhou, D., Das, D., and Wei, J
Shi, F., Suzgun, M., Freitag, M., Wang, X., Srivats, S., Vosoughi, S., Chung, H. W., Tay, Y., Ruder, S., Zhou, D., Das, D., and Wei, J. Language Models are Multilingual Chain -of- Thought Reasoners . In ICLR, 2023
2023
-
[36]
A., Maheswaranathan, N., and Ganguli, S
Sohl-Dickstein, J., Weiss, E. A., Maheswaranathan, N., and Ganguli, S. Deep Unsupervised Learning using Nonequilibrium Thermodynamics . In ICML , 2015
2015
-
[37]
Denoising diffusion implicit models
Song, J., Meng, C., and Ermon, S. Denoising diffusion implicit models. In ICLR , 2021 a
2021
-
[38]
P., Kumar, A., Ermon, S., and Poole, B
Song, Y., Sohl-Dickstein, J., Kingma, D. P., Kumar, A., Ermon, S., and Poole, B. Score- Based Generative Modeling through Stochastic Differential Equations . In ICLR, 2021 b
2021
-
[39]
Spall, J. C. Introduction to Stochastic Search and Optimization: Estimation , Simulation, and Control . Wiley, Hoboken, NJ, 2003
2003
-
[40]
Natural Evolution Strategies
Wierstra, D., Schaul, T., Peters, J., and Schmidhuber, J. Natural Evolution Strategies . In 2008 IEEE Congress on Evolutionary Computation , pp.\ 3381--3387, 2008
2008
-
[41]
Natural Evolution Strategies
Wierstra, D., Schaul, T., Glasmachers, T., Sun, Y., Peters, J., and Schmidhuber, J. Natural Evolution Strategies . Journal of Machine Learning Research, 15 0 (27): 0 949--980, 2014
2014
-
[42]
Y., Roelofs, R., Gontijo-Lopes, R., Morcos, A
Wortsman, M., Ilharco, G., Gadre, S. Y., Roelofs, R., Gontijo-Lopes, R., Morcos, A. S., Namkoong, H., Farhadi, A., Carmon, Y., Kornblith, S., and Schmidt, L. Model soups: averaging weights of multiple fine-tuned models improves accuracy without increasing inference time. In ICML, 2022
2022
-
[43]
Hybrid of PSO and CMA - ES for Global Optimization
Xu, P., Luo, W., Lin, X., Qiao, Y., and Zhu, T. Hybrid of PSO and CMA - ES for Global Optimization . In IEEE Congress on Evolutionary Computation , 2019
2019
-
[44]
TIES - Merging : Resolving Interference When Merging Models
Yadav, P., Tam, D., Choshen, L., Raffel, C., and Bansal, M. TIES - Merging : Resolving Interference When Merging Models . In NeurIPS , 2023
2023
-
[45]
Language Models are Super Mario : Absorbing Abilities from Homologous Models as a Free Lunch
Yu, L., Yu, B., Yu, H., Huang, F., and Li, Y. Language Models are Super Mario : Absorbing Abilities from Homologous Models as a Free Lunch . In ICML , 2024
2024
-
[46]
and Sanderson, A
Zhang, J. and Sanderson, A. C. JADE : Self -adaptive differential evolution with fast and reliable convergence performance. In 2007 IEEE Congress on Evolutionary Computation , 2007
2007
-
[47]
Diffusion Models are Evolutionary Algorithms
Zhang, Y., Hartl, B., Hazan, H., and Levin, M. Diffusion Models are Evolutionary Algorithms . In ICLR, 2025. URL https://openreview.net/forum?id=xVefsBbG2O
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.