A Distributed Multi-UGV Exploration Framework With Loop-Aware Planning and Descriptor-Aided Localization in Resource-Limited Environments
Pith reviewed 2026-06-27 13:05 UTC · model grok-4.3
The pith
A distributed multi-UGV framework pairs LiDAR descriptor loop closure with loop-aware planning to cut exploration time by 15 percent and travel distance by 14 percent versus mTSP baselines.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
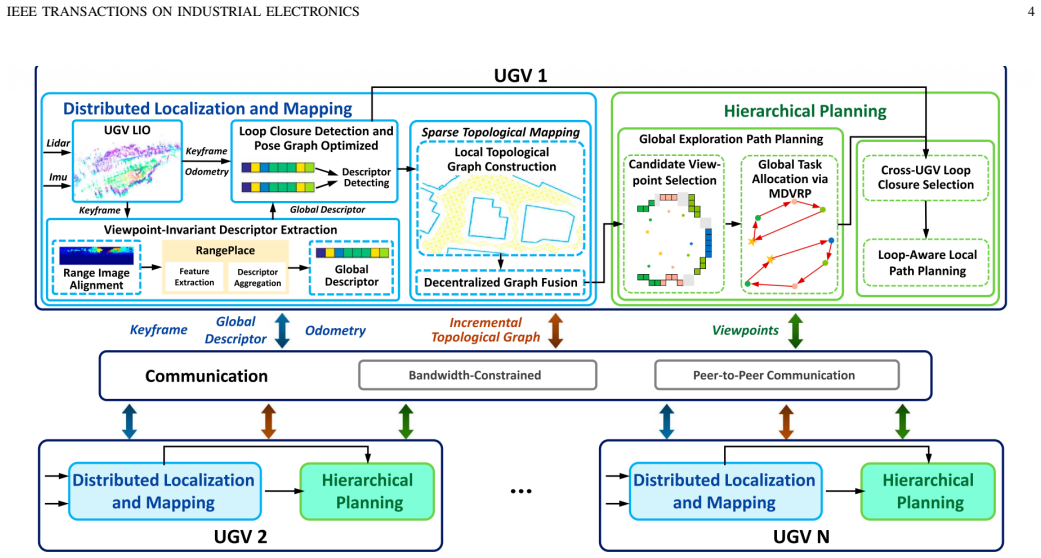
The central claim is that coupling descriptor-aided inter-UGV loop closure with loop-aware hierarchical planning enables autonomous localization and exploration in resource-limited settings: verified loop closures maintain globally consistent trajectories and a sparse topological representation, while an uncertainty-aware selection module scores candidates under pose uncertainty and retains high-utility closures as planning anchors, yielding the observed reductions in exploration time and travel distance.
What carries the argument
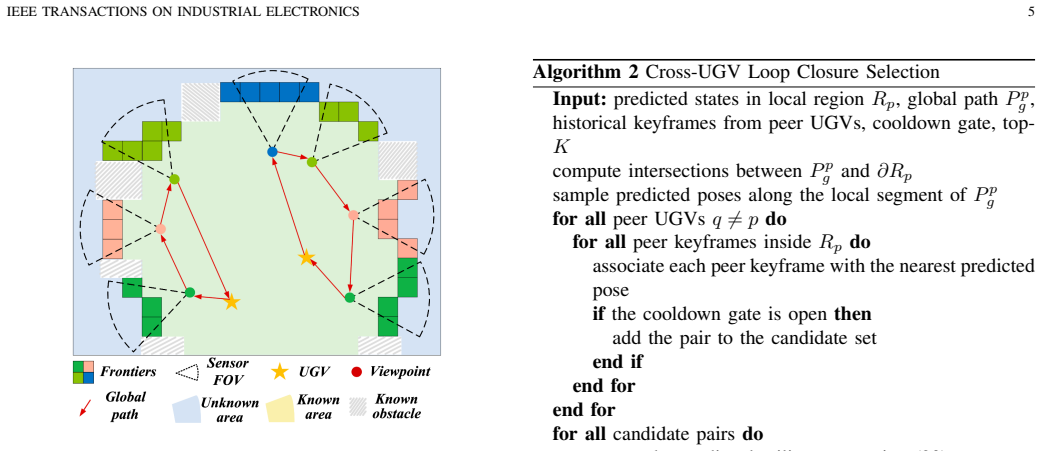
The lightweight LiDAR global descriptor with range-image prealignment, which performs cross-UGV place recognition under large viewpoint changes, together with the uncertainty-aware cross-UGV loop-closure selection module that scores candidates for use in global task allocation and local route refinement.
Load-bearing premise
The lightweight LiDAR global descriptor with range-image prealignment will enable robust cross-UGV place recognition under large yaw and lateral variations in real resource-limited environments without prior maps.
What would settle it
Real-UGV experiments in which place recognition fails frequently under large yaw and lateral shifts, producing no reduction or an increase in exploration time and distance relative to the mTSP baseline, would falsify the performance claims.
Figures







read the original abstract
Robust and efficient cooperative exploration with multiple unmanned ground vehicles (UGVs) in unknown, GPSdenied, and bandwidth-limited environments without prior maps remains challenging, as localization drift degrades map consistency and induces redundant coverage. This paper presents a fully distributed exploration framework that couples descriptoraided inter-UGV loop closure with loop-aware hierarchical planning while enabling autonomous localization and exploration. We develop a lightweight LiDAR global descriptor with range-image prealignment to enable robust cross-UGV place recognition under large yaw and lateral variations, and use verified loop closures to maintain globally consistent trajectories and a sparse topological representation. We further introduce an uncertainty-aware crossUGV loop-closure selection module that scores candidate loop closures under pose uncertainty and retains high-utility loop closures as planning anchors for global task allocation and local route refinement. Simulations and real-UGV experiments show that the loop-closure module achieves AR@1/AR@1% of 89.9%/95.5%, distributed optimization reduces absolute trajectory error, the system substantially reduces two-way communication volume, and the overall framework reduces exploration time and travel distance by 15% and 14%, respectively, compared with an mTSP baseline.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a fully distributed multi-UGV exploration framework for unknown, GPS-denied, bandwidth-limited environments without prior maps. It integrates a lightweight LiDAR global descriptor with range-image prealignment for cross-UGV place recognition, an uncertainty-aware loop-closure selection module that uses verified closures as planning anchors, and loop-aware hierarchical planning to maintain consistent trajectories and reduce redundant coverage. Key reported results include AR@1/AR@1% of 89.9%/95.5% for the loop-closure module, reduced absolute trajectory error from distributed optimization, lower two-way communication volume, and 15%/14% reductions in exploration time and travel distance versus an mTSP baseline, supported by simulation and real-UGV experiments.
Significance. If the empirical results hold under broader validation, the framework offers a practical contribution to cooperative robotics by enabling map-free, distributed operation in resource-constrained settings. The combination of lightweight descriptors, uncertainty-aware selection, and planning integration addresses localization drift and communication limits in a manner that could support applications such as search-and-rescue or infrastructure inspection.
major comments (1)
- [Abstract] Abstract: The headline comparative claims (15% exploration time reduction and 14% travel distance reduction versus mTSP) and the AR@1/AR@1% metrics are stated without reference to the number of trials, variance, statistical significance testing, or precise baseline implementations. These details are load-bearing for assessing whether the reported gains reliably support the framework's advantages.
minor comments (2)
- [Abstract] The abstract states that the system 'substantially reduces two-way communication volume' but provides no quantitative figures or comparison method; adding this would improve clarity of the distributed aspect.
- The description of the descriptor's robustness under yaw and lateral variations would benefit from explicit mention of the test environment scale or sensor characteristics to contextualize the AR metrics.
Simulated Author's Rebuttal
We thank the referee for the constructive comment and positive overall assessment. We address the point on the abstract below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline comparative claims (15% exploration time reduction and 14% travel distance reduction versus mTSP) and the AR@1/AR@1% metrics are stated without reference to the number of trials, variance, statistical significance testing, or precise baseline implementations. These details are load-bearing for assessing whether the reported gains reliably support the framework's advantages.
Authors: We agree that the abstract would be strengthened by including these supporting details. In the revised manuscript we will update the abstract to reference the number of simulation and real-world trials (as reported in Sections V and VI), include variance information, note the statistical testing performed, and briefly clarify the mTSP baseline implementation. These elements exist in the full experimental evaluation but were omitted from the abstract for length; we will incorporate concise references to them. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents a distributed multi-UGV exploration system whose central claims (15%/14% reductions vs. mTSP baseline, AR@1/AR@1% of 89.9%/95.5%, ATE reduction) are supported solely by reported simulation and real-robot experiments. No equations, derivations, fitted parameters, or self-citation chains appear in the provided text; all performance numbers are externally validated against baselines rather than defined in terms of the same data. The derivation chain is therefore self-contained and non-circular.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Representation gran- ularity enables time-efficient autonomous exploration in large, complex worlds,
C. Cao, H. Zhu, Z. Ren, H. Choset, and J. Zhang, “Representation gran- ularity enables time-efficient autonomous exploration in large, complex worlds,”Sci. Robot., vol. 8, no. 80, Art. no. peadf0970, 2023
2023
-
[2]
RACER: Rapid collaborative exploration with a decentralized multi-UA V system,
B. Zhou, H. Xu, and S. Shen, “RACER: Rapid collaborative exploration with a decentralized multi-UA V system,”IEEE Trans. Robot., vol. 39, no. 3, pp. 1816–1835, Jun. 2023
2023
-
[3]
A multi-robot exploration planner for space applications,
V . S. Varadharajan and G. Beltrame, “A multi-robot exploration planner for space applications,”IEEE Robot. Autom. Lett., vol. 10, no. 3, pp. 2446–2453, Mar. 2025
2025
-
[4]
Fast and communication-efficient multi-UA V explo- ration via V oronoi partition on dynamic topological graph,
Q. Donget al., “Fast and communication-efficient multi-UA V explo- ration via V oronoi partition on dynamic topological graph,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2024, pp. 14063–14070
2024
-
[5]
MR-GMMExplore: Multi-robot exploration system in unknown environments based on Gaussian mixture model,
Y . Wuet al., “MR-GMMExplore: Multi-robot exploration system in unknown environments based on Gaussian mixture model,” inProc. IEEE Int. Conf. Robot. Biomimetics (ROBIO), 2022, pp. 1198–1203
2022
-
[6]
A multi-robot cooperative exploration algorithm considering working efficiency and working load,
M. Zhao, H. Lu, S. Cheng, S. Yang, and Y . Shi, “A multi-robot cooperative exploration algorithm considering working efficiency and working load,”Appl. Soft Comput., vol. 128, Art. no. 109482, 2022
2022
-
[7]
Omni-Swarm: A decentralized omnidirectional visual- inertial-UWB state estimation system for aerial swarms,
H. Xuet al., “Omni-Swarm: A decentralized omnidirectional visual- inertial-UWB state estimation system for aerial swarms,”IEEE Trans. Robot., vol. 38, no. 6, pp. 3374–3394, Dec. 2022
2022
-
[8]
DCL-SLAM: A distributed collaborative LiDAR SLAM framework for a robotic swarm,
S. Zhong, Y . Qi, Z. Chen, J. Wu, H. Chen, and M. Liu, “DCL-SLAM: A distributed collaborative LiDAR SLAM framework for a robotic swarm,” IEEE Sensors J., vol. 24, no. 4, pp. 4786–4797, Feb. 2024
2024
-
[9]
D2SLAM: Decentralized and distributed collaborative visual-inertial SLAM system for aerial swarm,
H. Xu, P. Liu, X. Chen, and S. Shen, “D2SLAM: Decentralized and distributed collaborative visual-inertial SLAM system for aerial swarm,” IEEE Trans. Robot., vol. 40, pp. 3445–3464, 2024
2024
-
[10]
DiSCo-SLAM: Distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global- local graph optimization,
Y . Huang, T. Shan, F. Chen, and B. Englot, “DiSCo-SLAM: Distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global- local graph optimization,”IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 1150–1157, Apr. 2022
2022
-
[11]
Swarm-SLAM: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems,
P.-Y . Lajoie and G. Beltrame, “Swarm-SLAM: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems,”IEEE Robot. Autom. Lett., vol. 9, no. 1, pp. 475– 482, Jan. 2024
2024
-
[12]
Swarm-LIO2: Decentralized efficient LiDAR-inertial odometry for aerial swarm systems,
F. Zhuet al., “Swarm-LIO2: Decentralized efficient LiDAR-inertial odometry for aerial swarm systems,”IEEE Trans. Robot., vol. 41, pp. 960–981, 2025
2025
-
[13]
LiDAR Iris for loop-closure detection,
Y . Wang, Z. Sun, C.-Z. Xu, S. E. Sarma, J. Yang, and H. Kong, “LiDAR Iris for loop-closure detection,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2020, pp. 5769–5775
2020
-
[14]
Scan Context++: Structural place recog- nition robust to rotation and lateral variations in urban environments,
G. Kim, S. Choi, and A. Kim, “Scan Context++: Structural place recog- nition robust to rotation and lateral variations in urban environments,” IEEE Trans. Robot., vol. 38, no. 3, pp. 1856–1874, Jun. 2022
2022
-
[15]
RING++: Roto-translation invariant gram for global localization on a sparse scan map,
X. Xuet al., “RING++: Roto-translation invariant gram for global localization on a sparse scan map,”IEEE Trans. Robot., vol. 39, no. 6, pp. 4616–4635, Dec. 2023. IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS 10 TABLE VIII EXPLORATIONMETRICSUNDERDIFFERENTLOCALIZATIONMETHODS ANDPLANNINGSTRATEGIES Metric mTARE Planner [1] Ours (Hierarchical) Planner Fast-LIO2 ...
2023
-
[16]
OverlapTransformer: An efficient and yaw-angle-invariant transformer network for LiDAR- based place recognition,
J. Ma, J. Zhang, J. Xu, R. Ai, W. Gu, and X. Chen, “OverlapTransformer: An efficient and yaw-angle-invariant transformer network for LiDAR- based place recognition,”IEEE Robot. Autom. Lett., vol. 7, no. 3, pp. 6958–6965, May 2022
2022
-
[17]
IEEE Transactions on Intelligent Vehicles8(4), 2650–2660 (Apr 2023).https://doi.org/10.1109/tiv
J. Li, Q. Liu, B. Wang, H. Liu, and Y . Han, “RangePlace: A hi- erarchical range image transformer for LiDAR-based place recogni- tion,”IEEE Trans. Intell. V eh., early access, Aug. 12, 2024, doi: 10.1109/TIV .2024.3433401
work page doi:10.1109/tiv 2024
-
[18]
Distributed mapping with privacy and communication constraints: Lightweight algorithms and object-based models,
S. Choudhary, L. Carlone, C. Nieto, J. Rogers, H. I. Christensen, and F. Dellaert, “Distributed mapping with privacy and communication constraints: Lightweight algorithms and object-based models,”Int. J. Robot. Res., vol. 36, no. 12, pp. 1286–1311, 2017
2017
-
[19]
iSAM2: Incremental smoothing and mapping using the Bayes tree,
M. Kaess, H. Johannsson, R. Roberts, V . Ila, J. J. Leonard, and F. Dellaert, “iSAM2: Incremental smoothing and mapping using the Bayes tree,”Int. J. Robot. Res., vol. 31, no. 2, pp. 216–235, 2012
2012
-
[20]
TARE: A hierarchical framework for efficiently exploring complex 3D environments,
C. Cao, H. Zhu, H. Choset, and J. Zhang, “TARE: A hierarchical framework for efficiently exploring complex 3D environments,” inProc. Robot.: Sci. Syst. Conf. (RSS), Virtual, 2021, pp. 1–9
2021
-
[21]
Autonomous exploration method for fast unknown environment mapping by using UA V equipped with limited FOV sensor,
Y . Zhao, L. Yan, H. Xie, J. Dai, and P. Wei, “Autonomous exploration method for fast unknown environment mapping by using UA V equipped with limited FOV sensor,”IEEE Trans. Ind. Electron., vol. 71, no. 5, pp. 4933–4943, May 2024
2024
-
[22]
A novel informative autonomous exploration strategy with uniform sampling for quadrotors,
X. Zhang, Y . Chu, Y . Liu, X. Zhang, and Y . Zhuang, “A novel informative autonomous exploration strategy with uniform sampling for quadrotors,”IEEE Trans. Ind. Electron., vol. 69, no. 12, pp. 13131– 13140, Dec. 2022
2022
-
[23]
Dual-layer path planning with pose SLAM for autonomous exploration in GPS-denied environments,
S. Zhang, R. Cui, W. Yan, and Y . Li, “Dual-layer path planning with pose SLAM for autonomous exploration in GPS-denied environments,” IEEE Trans. Ind. Electron., vol. 71, no. 5, pp. 4976–4986, May 2024
2024
-
[24]
Multi- robot active graph exploration with reduced pose-SLAM uncertainty via submodular optimization,
R. Bai, S. Yuan, H. Guo, P. Yin, W.-Y . Yau, and L. Xie, “Multi- robot active graph exploration with reduced pose-SLAM uncertainty via submodular optimization,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2024, pp. 10229–10236
2024
-
[25]
V oxelized GICP for fast and accurate 3D point cloud registration,
K. Koide, M. Yokozuka, S. Oishi, and A. Banno, “V oxelized GICP for fast and accurate 3D point cloud registration,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2021, pp. 11054–11059
2021
-
[26]
Are we ready for autonomous driving? The KITTI vision benchmark suite,
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? The KITTI vision benchmark suite,” inProc. Conf. Comput. Vis. Pattern Recognit. (CVPR), 2012
2012
-
[27]
MulRan: Multimodal range dataset for urban place recognition,
G. Kim, Y . S. Park, Y . Cho, J. Jeong, and A. Kim, “MulRan: Multimodal range dataset for urban place recognition,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Paris, France, May 2020
2020
-
[28]
S3E: A multi-robot multimodal dataset for collaborative SLAM,
D. Fenget al., “S3E: A multi-robot multimodal dataset for collaborative SLAM,”IEEE Robot. Autom. Lett., vol. 9, no. 12, pp. 11401–11408, Dec. 2024
2024
-
[29]
FAST-LIO2: Fast direct LiDAR-inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “FAST-LIO2: Fast direct LiDAR-inertial odometry,”IEEE Trans. Robot., vol. 38, no. 4, pp. 2053– 2073, Aug. 2022
2053
-
[30]
Kimera-Multi: A system for distributed multi-robot metric-semantic simultaneous localization and mapping,
Y . Chang, Y . Tian, J. P. How, and L. Carlone, “Kimera-Multi: A system for distributed multi-robot metric-semantic simultaneous localization and mapping,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2021, pp. 11210–11218
2021
-
[31]
Autonomous exploration development environment and the planning algorithms,
C. Caoet al., “Autonomous exploration development environment and the planning algorithms,” inProc. Int. Conf. Robot. Autom. (ICRA), 2022, pp. 8921–8928
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.