Towards Integrated Rock Support Visualisation in 3D Point Cloud of Underground Mines
Pith reviewed 2026-05-21 04:51 UTC · model grok-4.3
The pith
An automated framework integrates rock structure mapping and bolt identification in 3D point clouds of underground mines.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that by integrating these tasks into a unified workflow optimised for accuracy and efficiency, it becomes possible to generate 3D visualisations of fitted discontinuity planes and bolt vectors, enabling direct assessment of their spatial intersections and geometric relationships, along with stereographic analysis and bolt quality metrics, all from point cloud data without additional measurements.
What carries the argument
The unified workflow that merges structure mapping with rock bolt identification to produce integrated 3D visualisations and analyses.
If this is right
- Produces 3D visualisations for direct assessment of intersections between discontinuity planes and bolt vectors.
- Supports stereographic analysis of discontinuity poles and bolt orientations to evaluate bolting effectiveness.
- Visualises bolt-level quality metrics including exposed protrusion length and deviation from the local roof normal.
- Allows automated integrated geotechnical assessment from point clouds without manual measurements or in-situ data.
Where Pith is reading between the lines
- Such a framework could be extended to process larger or higher-resolution scans for full mine coverage.
- Insights from the visualizations might help optimize future bolt placement strategies based on mapped rock fabric.
- Repeated scans over time could track changes in support conditions as mining progresses.
Load-bearing premise
The algorithms for automated structure mapping and rock bolt identification are accurate enough on real mine point clouds to enable reliable integrated visualization without needing manual corrections.
What would settle it
A test where the framework's outputs for discontinuity planes and bolt positions are compared directly to independent manual surveys in the same underground sections to check for significant discrepancies.
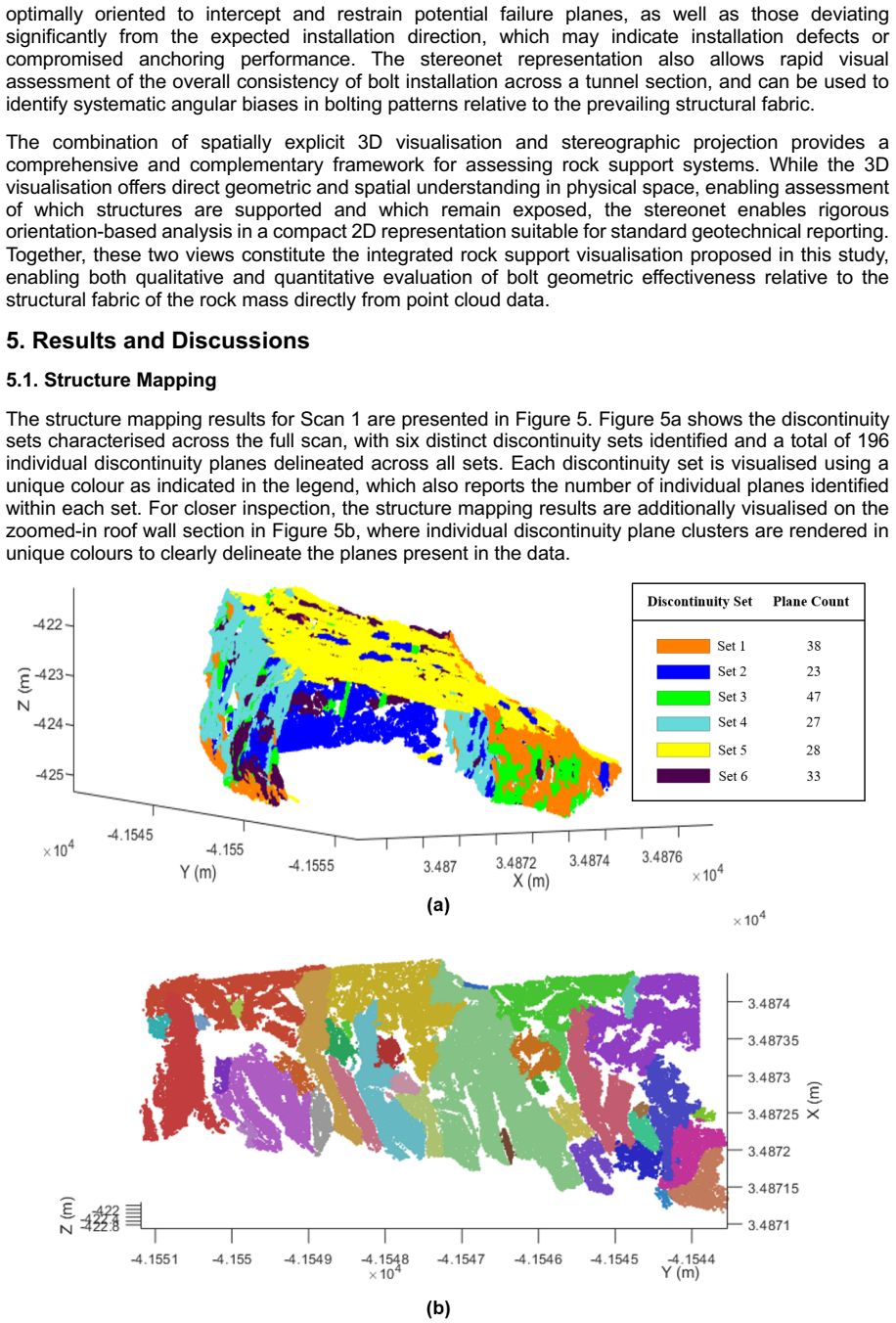
Figures


read the original abstract
The effectiveness of rock support in underground mines depends on the interaction between installed rock bolts and the structural fabric of the surrounding rock mass. However, discontinuity characterisation and rock bolt identification are commonly treated as separate tasks, limiting their value for integrated support assessment. This study presents an automated framework for integrated rock support visualisation using 3D point clouds of underground mine excavations. The framework integrates structure mapping, rock bolt identification, discontinuity plane fitting, and bolt orientation estimation into a unified workflow optimised for accuracy and computational efficiency. The outputs are used to generate an integrated 3D visualisation of fitted discontinuity planes and bolt vectors, enabling direct assessment of their spatial intersections and geometric relationships. A complementary stereographic analysis of discontinuity poles and bolt orientations is also performed to evaluate overall bolting geometric effectiveness relative to the mapped structural fabric. Additionally, bolt-level quality metrics, including exposed protrusion length and deviation from the local roof normal, are visualised to support assessment of installation quality. The proposed framework is demonstrated on real underground metal mine scans, producing accurate structure mapping and rock bolt identification results in medium-scale point clouds. Overall, the study provides a practical step towards automated, integrated geotechnical assessment of rock support effectiveness without requiring manual measurements or additional in-situ data acquisition.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an automated framework integrating structure mapping, rock bolt identification, discontinuity plane fitting, bolt orientation estimation, and stereographic analysis into a unified workflow for 3D point cloud visualisation of rock support in underground mines. Outputs include fitted planes, bolt vectors, spatial intersection visuals, and bolt-level quality metrics such as protrusion length and deviation from roof normal. The framework is demonstrated qualitatively on real underground metal mine scans, with claims of accurate results enabling reliable integrated assessment without manual measurements or additional in-situ data.
Significance. If the component algorithms achieve sufficient geometric accuracy, the integrated visualisation pipeline could offer a practical advance for geotechnical assessment in mining by linking rock mass structure directly to support element performance in a single 3D environment. The emphasis on real mine data and practical metrics like bolt deviation from local normal represents a useful step toward automated support evaluation.
major comments (1)
- [Demonstration on real underground metal mine scans] Demonstration on real underground metal mine scans: The abstract and framework description claim 'accurate structure mapping and rock bolt identification results' in medium-scale point clouds, yet no quantitative metrics (precision/recall for bolt detection, RMS error for plane fitting, bolt position/orientation deviation from ground truth, or any error analysis) are reported. This directly undermines evaluation of whether the integrated outputs support reliable geotechnical assessment without manual corrections, as the central claim rests on unverified component accuracy.
minor comments (2)
- [Abstract] Abstract: The phrase 'medium-scale point clouds' lacks a quantitative definition (e.g., approximate number of points, spatial extent, or point density), which would aid reproducibility and comparison with other point cloud studies.
- [Framework description] The description of the workflow as 'optimised for accuracy and computational efficiency' would benefit from explicit statements on the optimisation criteria or trade-offs considered.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We agree that strengthening the quantitative evaluation of the component algorithms will improve the assessment of the framework's reliability for geotechnical applications.
read point-by-point responses
-
Referee: Demonstration on real underground metal mine scans: The abstract and framework description claim 'accurate structure mapping and rock bolt identification results' in medium-scale point clouds, yet no quantitative metrics (precision/recall for bolt detection, RMS error for plane fitting, bolt position/orientation deviation from ground truth, or any error analysis) are reported. This directly undermines evaluation of whether the integrated outputs support reliable geotechnical assessment without manual corrections, as the central claim rests on unverified component accuracy.
Authors: We acknowledge that the current version of the manuscript does not include quantitative performance metrics such as precision/recall for bolt detection or RMS errors for plane fitting, relying primarily on qualitative demonstration using real underground mine point clouds. This choice stems from the practical difficulty of obtaining comprehensive ground-truth annotations for large-scale real mine scans without the very manual measurements our framework aims to reduce. We agree this limits the strength of the accuracy claims. In the revised manuscript we will add a dedicated quantitative evaluation section that reports precision and recall for rock bolt identification on manually annotated subsets of the data, RMS errors for discontinuity plane fitting against selected reference measurements, and basic error analysis for bolt orientation estimates. We will also revise the abstract and relevant claims to more accurately describe the results as demonstrating practical integrated visualisation on real data, with the added quantitative metrics supporting the assessment of reliability. revision: yes
Circularity Check
No circularity: descriptive integration of standard tasks
full rationale
The paper describes an automated framework that combines existing computer-vision tasks (structure mapping, rock bolt identification, discontinuity plane fitting, bolt orientation estimation) into a visualization pipeline for 3D mine point clouds. No equations, derivations, predictions, or first-principles results are presented anywhere in the manuscript. The central claims rest on the practical integration and qualitative demonstration on real scans rather than any mathematical reduction that loops back to fitted inputs or self-citations by construction. The workflow is therefore self-contained against external benchmarks and exhibits none of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The framework integrates structure mapping, rock bolt identification, discontinuity plane fitting, and bolt orientation estimation into a unified workflow... demonstrated on real underground metal mine scans
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
eigenvalue descriptors... planarity... HDBSCAN... DeepBolt dynamic graph convolution
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Cluster validity indices for automatic clustering: A comprehensive review,
A. M. Ikotun, F. Habyarimana, and A. E. Ezugwu, "Cluster validity indices for automatic clustering: A comprehensive review," Heliyon, vol. 11, no. 2, p. e41953, Jan 30 2025, doi: 10.1016/j.heliyon.2025.e41953. [25] A. J. Riquelme, A. Abellán, R. Tomás, and M. Jaboyedoff, "A new approach for semi-automatic rock mass joints recognition from 3D point clouds,...
-
[2]
J. Wang et al., "An interactive framework integrating segment anything model and structure-from-motion for three-dimensional discontinuity identification in rock masses," International Journal of Mining Science and Technology, vol. 35, no. 10, pp. 1695-1711, 2025, doi: 10.1016/j.ijmst.2025.09.005. [44] S. K. Singh, S. Raval, and B. Banerjee, "Roof bolt id...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.