The Spectrum Strikes Back: Infrared POV Attacks on Traffic Sign Classification
Pith reviewed 2026-06-30 05:29 UTC · model grok-4.3
The pith
A persistence-of-vision attack in near-infrared light can stealthily disrupt traffic sign classification at real-world distances.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
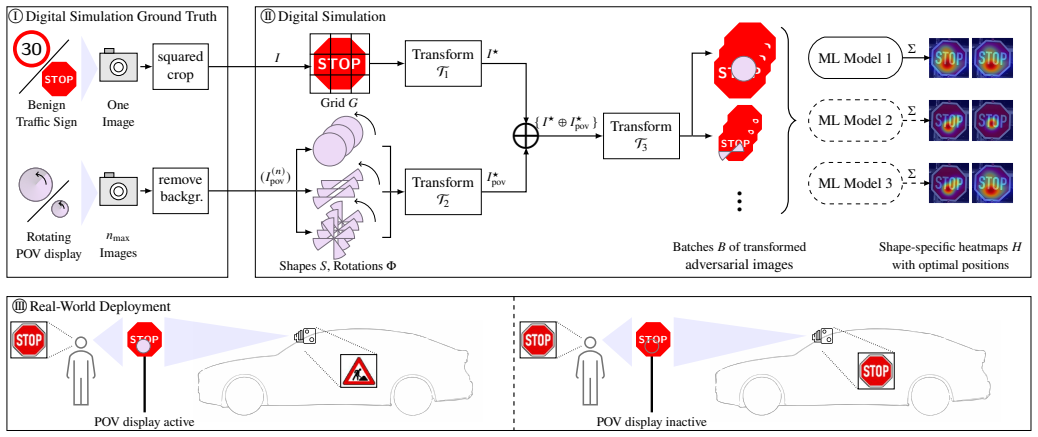
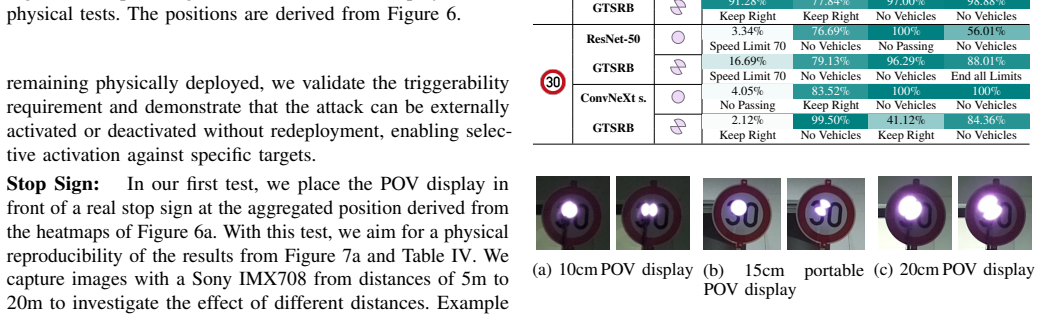
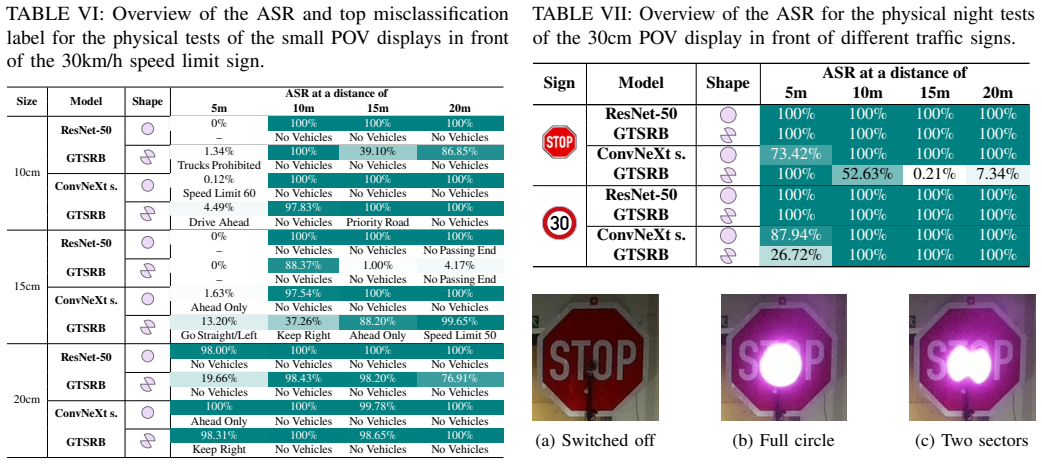
Our persistence-of-vision-based attack operating in the near-infrared light spectrum enables a stealthy physical adversarial attack against traffic sign classification by showing dynamic, remotely triggered content. By identifying optimal positions through digital simulation, we achieve high attack success rates in extensive real-world evaluations involving two traffic signs, 12 machine learning models, multiple distances up to 20 meters, and varying illumination conditions.
What carries the argument
A near-infrared persistence-of-vision display for projecting dynamic adversarial perturbations onto traffic signs.
If this is right
- The attack achieves high success rates across tested scenarios.
- It operates effectively at distances up to 20 meters.
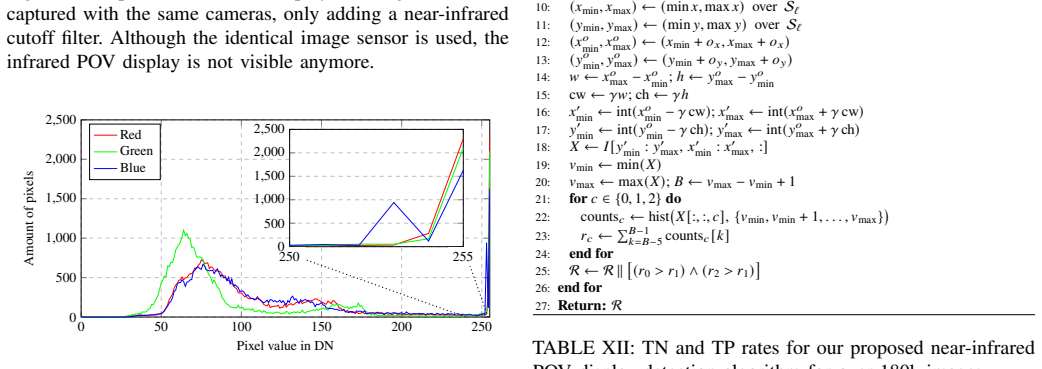
- Near-infrared cutoff filters and software-based detection serve as effective defenses.
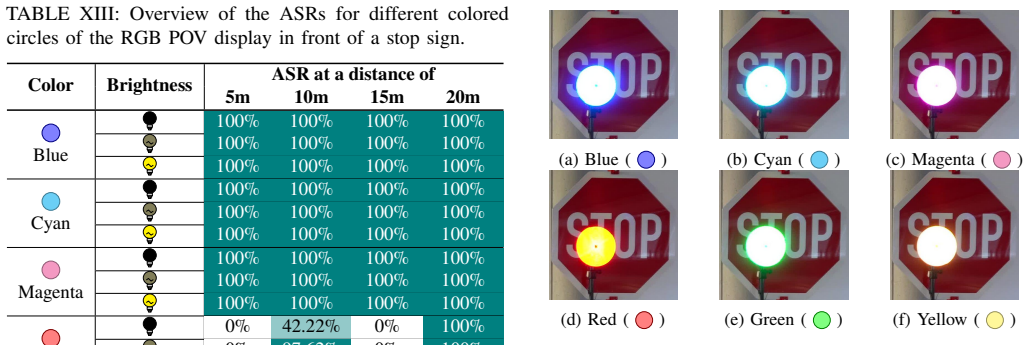
- A human-visible RGB prototype addresses the display's limitations in the near-infrared version.
Where Pith is reading between the lines
- This approach could be adapted to target other camera-dependent systems in vehicles, such as lane detection.
- Remote triggering allows the attack to be activated only when a specific vehicle is approaching, conserving resources.
- Vehicle manufacturers might need to incorporate hardware filters for near-infrared light to prevent such attacks.
Load-bearing premise
The digital simulation used to identify optimal attack positions accurately reflects real-world performance under the tested conditions.
What would settle it
An experiment where the attack is deployed at the simulated positions but fails to achieve high success rates when the distance reaches 20 meters or illumination changes significantly.
Figures






read the original abstract
Traffic sign classification is a crucial task for autonomous vehicles, and numerous attacks against it have been identified. A majority of physical adversarial attacks involve attaching patches to traffic signs or projecting perturbations on them. While they demonstrate high effectiveness, they are perceptible to humans. At the same time, light-based attacks outside the human visible spectrum are known but have limitations in their dynamic adaptability. We propose a persistence-of-vision-based attack that operates in the near-infrared light spectrum. With the possibility of showing dynamic, remotely triggered content, this allows a stealthy physical adversarial attack against traffic sign classification. By identifying the optimal position through digital simulation, we conduct extensive real-world evaluations using two different traffic signs, 12 machine learning models from different families, multiple distances up to 20 meters, and varying illumination conditions. Our evaluation shows high attack success rates across our test scenarios. We propose near-infrared cutoff filters and a software-based detection mechanism as defenses, and tackle limitations of the near-infrared persistence of vision display by prototyping a human-visible RGB version of it.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a persistence-of-vision (POV) attack in the near-infrared (NIR) spectrum as a stealthy, dynamic physical adversarial attack on traffic sign classification for autonomous vehicles. Optimal attack positions are identified via digital simulation; real-world evaluations then use two traffic signs, 12 models from different families, distances up to 20 m, and varying illumination conditions. The manuscript reports high attack success rates, proposes NIR cutoff filters and a software detector as defenses, and prototypes a human-visible RGB version of the display to address POV limitations.
Significance. If the empirical results hold after addressing validation gaps, the work demonstrates a new class of remotely triggerable, human-invisible physical attacks that exploit NIR sensitivity in camera-based perception systems. This could inform both attack surface analysis and defense design for AVs. The inclusion of multiple models, distances, illumination conditions, and explicit defense proposals strengthens the practical relevance; the simulation-guided position selection and RGB prototype are positive elements that could be strengthened by quantitative transfer validation.
major comments (2)
- [Abstract and Evaluation section] Abstract and Evaluation section: The central claim of 'high attack success rates across our test scenarios' is stated without any quantitative metrics, error bars, per-model/per-distance breakdowns, or exclusion criteria. This directly affects assessment of whether the reported real-world performance supports the claim that the attack 'operates' effectively under the tested conditions.
- [Simulation-to-real transfer paragraph (likely §4 or §5)] Simulation-to-real transfer paragraph (likely §4 or §5): Positions are selected via digital simulation before physical experiments, yet no quantitative validation is supplied (e.g., comparison of simulated vs. measured camera response curves in the 700–1000 nm band, or ablation of position choice). Without this, it is unclear whether the high real-world ASR reflects predictive power of the simulator or post-hoc selection of favorable locations, undermining the claim that the method reliably transfers under the stated distances and illumination.
minor comments (2)
- [Abstract] The abstract mentions 'extensive real-world evaluations' but supplies no table or figure reference for the quantitative results; adding a summary table of ASR by sign/model/distance would improve clarity.
- [Methods] Notation for the POV display parameters (e.g., rotation speed, LED timing) should be defined consistently when first introduced.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript to strengthen quantitative reporting and clarify the role of simulation.
read point-by-point responses
-
Referee: [Abstract and Evaluation section] Abstract and Evaluation section: The central claim of 'high attack success rates across our test scenarios' is stated without any quantitative metrics, error bars, per-model/per-distance breakdowns, or exclusion criteria. This directly affects assessment of whether the reported real-world performance supports the claim that the attack 'operates' effectively under the tested conditions.
Authors: We agree the abstract would benefit from quantitative support. The evaluation section already contains tables with per-model, per-distance, and per-illumination ASR values. We will update the abstract to report specific metrics (e.g., mean ASR and standard deviation across the 12 models), add error bars where applicable, and explicitly state any exclusion criteria used in the reported scenarios. revision: yes
-
Referee: [Simulation-to-real transfer paragraph (likely §4 or §5)] Simulation-to-real transfer paragraph (likely §4 or §5): Positions are selected via digital simulation before physical experiments, yet no quantitative validation is supplied (e.g., comparison of simulated vs. measured camera response curves in the 700–1000 nm band, or ablation of position choice). Without this, it is unclear whether the high real-world ASR reflects predictive power of the simulator or post-hoc selection of favorable locations, undermining the claim that the method reliably transfers under the stated distances and illumination.
Authors: The simulation served to efficiently identify candidate positions before committing to physical trials. While we did not include a direct quantitative comparison of simulated versus measured NIR camera response curves, the real-world results demonstrate consistent performance across distances up to 20 m and varying illumination. We will add a dedicated paragraph discussing the simulation's purpose, include an ablation on position sensitivity where data exists, and note the absence of full spectral response validation as a limitation. revision: partial
Circularity Check
No circularity: empirical attack demonstration with no derivation chain
full rationale
The paper is an empirical study reporting attack success rates from physical experiments on traffic sign classifiers. It uses simulation only to select attack positions before real-world testing and presents no equations, fitted parameters, or mathematical derivations. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The central claims rest on measured ASR values across signs, models, distances, and illumination rather than any reduction of outputs to inputs by construction. This is a standard non-circular empirical evaluation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mercedes-Benz world’s first automotive company to certify SAE Level 3 system for U.S. market | Mercedes-Benz Group > Innovations > Product innovation > Autonomous driving,
Mercedes-Benz Group AG, “Mercedes-Benz world’s first automotive company to certify SAE Level 3 system for U.S. market | Mercedes-Benz Group > Innovations > Product innovation > Autonomous driving,” January 2023. [Online]. Avail- able: https://group.mercedes-benz.com/innovation/product-innovation/ autonomous-driving/drive-pilot-nevada.html 13
2023
-
[2]
Self-Driving Car Technology for a Reliable Ride - Waymo Driver,
Waymo LLC, “Self-Driving Car Technology for a Reliable Ride - Waymo Driver,” July 2024. [Online]. Available: https://waymo.com/ waymo-driver/
2024
-
[3]
SoK: A Minimalist Approach to Formalizing Analog Sensor Security,
C. Yan, H. Shin, C. Bolton, W. Xu, Y . Kim, and K. Fu, “SoK: A Minimalist Approach to Formalizing Analog Sensor Security,” in2020 IEEE Symposium on Security and Privacy (SP). San Francisco, CA, USA: IEEE, May 2020, pp. 233–248
2020
-
[4]
Autonomous Driving Security: State of the Art and Challenges,
C. Gao, G. Wang, W. Shi, Z. Wang, and Y . Chen, “Autonomous Driving Security: State of the Art and Challenges,”IEEE Internet of Things Journal, vol. 9, no. 10, pp. 7572–7595, May 2022
2022
-
[5]
Cybersecurity Attacks in Vehicular Sensors,
Z. El-Rewini, K. Sadatsharan, N. Sugunaraj, D. F. Selvaraj, S. J. Plathottam, and P. Ranganathan, “Cybersecurity Attacks in Vehicular Sensors,”IEEE Sensors Journal, vol. 20, no. 22, pp. 13 752–13 767, November 2020
2020
-
[6]
LiDAR and cameras in autonomous driving,
J. Ibanez-Guzman and Y . Li, “LiDAR and cameras in autonomous driving,” Nature Reviews Electrical Engineering, May 2025
2025
-
[7]
Physical Adversarial Attacks for Camera-Based Smart Systems: Current Trends, Categorization, Applications, Research Challenges, and Future Outlook,
A. Guesmi, M. A. Hanif, B. Ouni, and M. Shafique, “Physical Adversarial Attacks for Camera-Based Smart Systems: Current Trends, Categorization, Applications, Research Challenges, and Future Outlook,”IEEE Access, vol. 11, pp. 109 617–109 668, 2023
2023
-
[8]
Physical Adversarial Attack Meets Computer Vision: A Decade Survey,
H. Wei, H. Tang, X. Jia, Z. Wang, H. Yu, Z. Li, S. Satoh, L. Van Gool, and Z. Wang, “Physical Adversarial Attack Meets Computer Vision: A Decade Survey,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 46, no. 12, pp. 9797–9817, December 2024
2024
-
[9]
Adversarial Attacks and Countermeasures on Image Classification-based Deep Learning Models in Autonomous Driving Systems: A Systematic Review,
B. Badjie, J. Cecílio, and A. Casimiro, “Adversarial Attacks and Countermeasures on Image Classification-based Deep Learning Models in Autonomous Driving Systems: A Systematic Review,”ACM Computing Surveys, vol. 57, no. 1, pp. 1–52, January 2025
2025
-
[10]
SoK: Security of the Image Processing Pipeline for Camera-based Sensing in Autonomous Vehicles,
M. Kühr, M. Hamad, P. MohajerAnsari, M. D. Pesé, and S. Steinhorst, “SoK: Security of the Image Processing Pipeline for Camera-based Sensing in Autonomous Vehicles,” January 2026, arXiv:2409.01234 [cs]. [Online]. Available: http://arxiv.org/abs/2409.01234
-
[11]
Robust Physical-World Attacks on Deep Learning Visual Classification,
K. Eykholt, I. Evtimov, E. Fernandes, B. Li, A. Rahmati, C. Xiao, A. Prakash, T. Kohno, and D. Song, “Robust Physical-World Attacks on Deep Learning Visual Classification,” in2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, UT, USA: IEEE, June 2018, pp. 1625–1634
2018
-
[12]
SLAP: Improving Physical Adversarial Examples with Short-Lived Ad- versarial Perturbations,
G. Lovisotto, H. Turner, I. Sluganovic, M. Strohmeier, and I. Martinovic, “SLAP: Improving Physical Adversarial Examples with Short-Lived Ad- versarial Perturbations,” in30th USENIX Security Symposium (USENIX Security 21). USENIX Association, August 2021, pp. 1865–1882
2021
-
[13]
Adversarial Laser Beam: Effective Physical-World Attack to DNNs in a Blink,
R. Duan, X. Mao, A. K. Qin, Y . Chen, S. Ye, Y . He, and Y . Yang, “Adversarial Laser Beam: Effective Physical-World Attack to DNNs in a Blink,” in2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, TN, USA: IEEE, June 2021, pp. 16 057–16 066
2021
-
[14]
Invisible Reflections: Leveraging Infrared Laser Reflections to Target Traffic Sign Perception,
T. Sato, S. H. V . Bhupathiraju, M. Clifford, T. Sugawara, Q. A. Chen, and S. Rampazzi, “Invisible Reflections: Leveraging Infrared Laser Reflections to Target Traffic Sign Perception,” inProceedings 2024 Network and Distributed System Security Symposium, San Diego, CA, USA, February 2024
2024
-
[15]
I Can See the Light: Attacks on Autonomous Vehicles Using Invisible Lights,
W. Wang, Y . Yao, X. Liu, X. Li, P. Hao, and T. Zhu, “I Can See the Light: Attacks on Autonomous Vehicles Using Invisible Lights,” inProceedings of the 2021 ACM SIGSAC Conference on Computer and Communications Security. Virtual Event Republic of Korea: ACM, November 2021, pp. 1930–1944
2021
-
[16]
Night-Capable Camera Systems | AUMOVIO,
Aumovio SE, “Night-Capable Camera Systems | AUMOVIO,” 2025. [On- line]. Available: https://www.aumovio.com/en/solutions/driver-assistance/ automated-assisted-driving/night-capable-camera-systems.html
2025
-
[17]
All-Weather Vision for Automotive Safety: Which Spectral Band?
N. Pinchon, O. Cassignol, A. Nicolas, F. Bernardin, P. Leduc, J.-P. Tarel, R. Brémond, E. Bercier, and J. Brunet, “All-Weather Vision for Automotive Safety: Which Spectral Band?” inAdvanced Microsystems for Automotive Applications 2018. Cham: Springer International Publishing, 2019, pp. 3–15
2018
-
[18]
WP7113SF6BT-P22 - T-1 3/4 (5mm) Infrared Emitting Diode,
Kingbright, “WP7113SF6BT-P22 - T-1 3/4 (5mm) Infrared Emitting Diode,” November 2024. [Online]. Available: https://www.kingbrightusa. com/images/catalog/SPEC/WP7113SF6BT-P22.pdf
2024
-
[19]
Synthesizing Robust Adversarial Examples,
A. Athalye, L. Engstrom, A. Ilyas, and K. Kwok, “Synthesizing Robust Adversarial Examples,” inProceedings of the 35th International Conference on Machine Learning, ser. Proceedings of Machine Learning Research, J. Dy and A. Krause, Eds., vol. 80. Stockholm, Sweden: PMLR, July 2018, pp. 284–293
2018
-
[20]
CIE DIS 017/E:2016 - ILV: International Lighting V ocabulary,
International Commission on Illumination, “CIE DIS 017/E:2016 - ILV: International Lighting V ocabulary,” CIE Central Bureau, Vienna, International Standard, 2016, 2nd Edition
2016
-
[21]
Advances on CMOS image sensors,
L. C. P. Gouveia and B. Choubey, “Advances on CMOS image sensors,” Sensor Review, vol. 36, no. 3, pp. 231–239, June 2016
2016
-
[22]
CMOS image sensors,
A. El Gamal and H. Eltoukhy, “CMOS image sensors,”IEEE Circuits and Devices Magazine, vol. 21, no. 3, pp. 6–20, May 2005
2005
-
[23]
Invisible Mask: Practical Attacks on Face Recognition with Infrared
Z. Zhou, D. Tang, X. Wang, W. Han, X. Liu, and K. Zhang, “Invisible Mask: Practical Attacks on Face Recognition with Infrared,” March 2018, arXiv:1803.04683 [cs]. [Online]. Available: http://arxiv.org/abs/1803.04683
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[24]
The Invisible Polyjuice Potion: an Effective Physical Adversarial Attack against Face Recog- nition,
Y . Wang, Z. Liu, B. Luo, R. Hui, and F. Li, “The Invisible Polyjuice Potion: an Effective Physical Adversarial Attack against Face Recog- nition,” inProceedings of the 2024 on ACM SIGSAC Conference on Computer and Communications Security. Salt Lake City UT USA: ACM, December 2024, pp. 3346–3360
2024
-
[25]
The persistences of vision,
M. Coltheart, “The persistences of vision,”Philosophical Transactions of the Royal Society of London. B, Biological Sciences, vol. 290, no. 1038, pp. 57–69, July 1980
1980
-
[26]
Persistence of vision,
E. S. Ferry, “Persistence of vision,”American Journal of Science, vol. 3, no. 261, pp. 192–207, 1892
-
[27]
TPatch: A Triggered Physical Adversarial Patch,
W. Zhu, X. Ji, Y . Cheng, S. Zhang, and W. Xu, “TPatch: A Triggered Physical Adversarial Patch,” in32nd USENIX Security Symposium (USENIX Security 23). Anaheim, CA: USENIX Association, August 2023, pp. 661–678
2023
-
[28]
Moiré Injection Attack (MIA) : Compromising Autonomous Vehicle Safety via Exploiting Camera’s Color Filter Array (CFA) to Inject Hidden Traffic Sign,
Q. Xia and Q. Chen, “Moiré Injection Attack (MIA) : Compromising Autonomous Vehicle Safety via Exploiting Camera’s Color Filter Array (CFA) to Inject Hidden Traffic Sign,” in2024 Annual Computer Security Applications Conference (ACSAC). Honolulu, HI, USA: IEEE, December 2024, pp. 988–1001
2024
-
[29]
Remote Perception Attacks against Camera-based Object Recognition Systems and Countermeasures,
Y . Man, M. Li, and R. Gerdes, “Remote Perception Attacks against Camera-based Object Recognition Systems and Countermeasures,”ACM Transactions on Cyber-Physical Systems, vol. 8, no. 2, pp. 1–27, April 2024
2024
-
[30]
Fundamentals of Silicon-Based Phototrans- duction,
H. Ji and P. A. Abshire, “Fundamentals of Silicon-Based Phototrans- duction,” inCMOS Imagers, O. Yadid-Pecht and R. Etienne-Cummings, Eds. Boston, MA: Springer US, 2004, pp. 1–51
2004
-
[31]
Near Infrared Quantum Efficiency Simulations for CMOS Image Sensors,
A. Perkins and S. Borthakur, “Near Infrared Quantum Efficiency Simulations for CMOS Image Sensors,”Proceedings 2023 International Image Sensor Workshop, 2023
2023
-
[32]
CCD/CMOS image sensors - Image sensors for scientific measurements and industrial equipment,
Hamamatsu Photonics K.K., “CCD/CMOS image sensors - Image sensors for scientific measurements and industrial equipment,” September 2025. [Online]. Available: https://www.hamamatsu.com/content/dam/hamamatsu-photonics/sites/ documents/99_SALES_LIBRARY/ssd/image_sensor_kmpd0002e.pdf
2025
-
[33]
Alvium 1800 C-240 Alvium 1800 C-240 | 2.4 MP Sony IMX392 CMOS sensor - Allied Vision,
Allied Vision Technologies GmbH, “Alvium 1800 C-240 Alvium 1800 C-240 | 2.4 MP Sony IMX392 CMOS sensor - Allied Vision,” October
-
[34]
Available: https://www.alliedvision.com/en/products/ alvium-configurator/alvium-1800-c/240/
[Online]. Available: https://www.alliedvision.com/en/products/ alvium-configurator/alvium-1800-c/240/
-
[35]
775 Ball Bearing DC Motor - Data Specs,
Handson Technology, “775 Ball Bearing DC Motor - Data Specs,” November 2025. [Online]. Available: https://www.handsontec.com/ dataspecs/motor_fan/775-Motor.pdf
2025
-
[36]
FK-280SA V-19170,
Motraxx Elektrogeräte GmbH, “FK-280SA V-19170,” 2022. [Online]. Available: https://motraxx.com/assets/229020_FK-280SA-19170.pdf
2022
-
[37]
Camera - Raspberry Pi Documentation,
Raspberry Pi Ltd., “Camera - Raspberry Pi Documentation,” July
-
[38]
Available: https://www.raspberrypi.com/documentation/ accessories/camera.html
[Online]. Available: https://www.raspberrypi.com/documentation/ accessories/camera.html
-
[39]
Man vs. computer: Benchmarking machine learning algorithms for traffic sign recognition,
J. Stallkamp, M. Schlipsing, J. Salmen, and C. Igel, “Man vs. computer: Benchmarking machine learning algorithms for traffic sign recognition,” Neural Networks, vol. 32, pp. 323–332, August 2012
2012
-
[40]
Revisiting Physical-World Adversarial Attack on Traffic Sign Recognition: A Commercial Systems Perspective,
N. Wang, S. Xie, T. Sato, Y . Luo, K. Xu, and Q. A. Chen, “Revisiting Physical-World Adversarial Attack on Traffic Sign Recognition: A Commercial Systems Perspective,” inProceedings 2025 Network and Distributed System Security Symposium. San Diego, CA, USA: Internet Society, 2025
2025
-
[41]
Deep Residual Learning for Image Recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep Residual Learning for Image Recognition,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2016
2016
-
[42]
A ConvNet for the 2020s,
Z. Liu, H. Mao, C.-Y . Wu, C. Feichtenhofer, T. Darrell, and S. Xie, “A ConvNet for the 2020s,” in2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, LA, USA: IEEE, June 2022, pp. 11 966–11 976
2022
-
[43]
ImageNet: A large-scale hierarchical image database,
J. Deng, W. Dong, R. Socher, L.-J. Li, Kai Li, and Li Fei-Fei, “ImageNet: A large-scale hierarchical image database,” in2009 IEEE Conference 14 on Computer Vision and Pattern Recognition. Miami, FL: IEEE, June 2009, pp. 248–255
2009
-
[44]
Microsoft COCO: Common Objects in Context,
T.-Y . Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollár, and C. L. Zitnick, “Microsoft COCO: Common Objects in Context,” inComputer Vision – ECCV 2014, D. Fleet, T. Pajdla, B. Schiele, and T. Tuytelaars, Eds. Cham: Springer International Publishing, 2014, vol. 8693, pp. 740–755, series Title: Lecture Notes in Computer Science
2014
-
[45]
Aggregated Residual Transformations for Deep Neural Networks,
S. Xie, R. Girshick, P. Dollar, Z. Tu, and K. He, “Aggregated Residual Transformations for Deep Neural Networks,” in2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, HI: IEEE, July 2017, pp. 5987–5995
2017
-
[46]
Very Deep Convolutional Networks for Large-Scale Image Recognition
K. Simonyan and A. Zisserman, “Very Deep Convolutional Networks for Large-Scale Image Recognition,” April 2015, arXiv:1409.1556 [cs]. [Online]. Available: http://arxiv.org/abs/1409.1556
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[47]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale,
A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, X. Zhai, T. Unterthiner, M. Dehghani, M. Minderer, G. Heigold, S. Gelly, J. Uszkoreit, and N. Houlsby, “An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale,” in2021 International Conference on Learning Representations, Virtual Event, May 2021
2021
-
[48]
Ultralytics YOLO11,
G. Jocher and J. Qiu, “Ultralytics YOLO11,” 2024. [Online]. Available: https://github.com/ultralytics/ultralytics
2024
-
[49]
Faster R-CNN: Towards Real- Time Object Detection with Region Proposal Networks,
S. Ren, K. He, R. Girshick, and J. Sun, “Faster R-CNN: Towards Real- Time Object Detection with Region Proposal Networks,” inAdvances in Neural Information Processing Systems, C. Cortes, N. Lawrence, D. Lee, M. Sugiyama, and R. Garnett, Eds., vol. 28. Curran Associates, Inc., 2015
2015
-
[50]
Night Breaker LED Vin- tage H4,
OSRAM GmbH, “Night Breaker LED Vin- tage H4,” December 2025. [Online]. Avail- able: https://www.osram.co.uk/appsj/pdc/pdf.do?cid=GPS01_34401769& vid=MP_EUROPE_UK_eCat&lid=EN&mpid=ZMP_4069705
2025
-
[51]
United Nations, “E/ECE/324/Rev.2/Add.111/Rev.4, E/ECE/- TRANS/505/Rev.2/Add.111/Rev.4: Uniform provisions concerning the approval of motor vehicle headlamps emitting an asymmetrical passing-beam or a driving-beam or both and equipped with filament light sources and/or light-emitting diode (LED) modules,” United Nations, Agreement, September 2023
2023
-
[52]
DIN 67520:2025-06: Retro- reflecting materials for traffic safety - Photometric minimum requirements for retro-reflective sheetings,
DIN Deutsches Institut für Normung e. V ., “DIN 67520:2025-06: Retro- reflecting materials for traffic safety - Photometric minimum requirements for retro-reflective sheetings,” DIN Deutsches Institut für Normung e. V ., Berlin, Deutsche Norm, June 2025
2025
-
[53]
EN 12899-1:2007:E: Fixed, vertical road traffic signs – Part 1: Fixed signs,
European Committee for Standardization, “EN 12899-1:2007:E: Fixed, vertical road traffic signs – Part 1: Fixed signs,” European Committee for Standardization, B-1050 Brussels, European Standard, November 2007
2007
-
[54]
ECE/TRANS/196: Convention on Road Signs and Signals of 1968 European Agreement Sup- plementing the Convention and Protocol on Road Markings, Additional to the European Agreement,
United Nations Economic Commission for Europe, “ECE/TRANS/196: Convention on Road Signs and Signals of 1968 European Agreement Sup- plementing the Convention and Protocol on Road Markings, Additional to the European Agreement,” United Nations Economic Commission for Europe, United Nations Publication, December 2006
1968
-
[55]
Infrared-Filter (IR-Filter),
BTE Bedampfungstechnik GmbH, “Infrared-Filter (IR-Filter),” 2025. [Online]. Available: https://www.bte-born.com/fileadmin/bte/Downloads/ Datenbl%C3%A4tter/BTE_Datenblatt_IR_ENG_29042025_fin.pdf
2025
-
[56]
Coated Optics for Sensor Applications,
Optics Balzers AG, “Coated Optics for Sensor Applications,” 2025. [Online]. Available: https: //www.materionbalzersoptics.com/de/service/datenblaetter/download/ e4554a6778fe4b4481fa970161eaef40cabf82b74bfee1f81fcc572f327ce782
2025
-
[57]
Elementary Graph Algorithms,
T. H. Cormen, C. E. Leiserson, R. L. Rivest, and C. Stein, “Elementary Graph Algorithms,” inIntroduction to Algorithms, 3rd ed. The MIT Press, 2009, pp. 589–623
2009
-
[58]
Dynamic adversarial at- tacks on autonomous driving systems.arXiv preprint arXiv:2312.06701, 2023
A. Chahe, C. Wang, A. Jeyapratap, K. Xu, and L. Zhou, “Dynamic Adversarial Attacks on Autonomous Driving Systems,” May 2024, arXiv:2312.06701 [cs]. [Online]. Available: http://arxiv.org/abs/2312. 06701
-
[59]
Overriding Autonomous Driving Systems Using Adaptive Adversarial Billboards,
N. Patel, P. Krishnamurthy, S. Garg, and F. Khorrami, “Overriding Autonomous Driving Systems Using Adaptive Adversarial Billboards,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 8, pp. 11 386–11 396, August 2022
2022
-
[60]
Color Imaging Array,
B. E. Bayer, “Color Imaging Array,” USA Patent United States Patent 3,971,065, Jul., 1976
1976
-
[61]
ILCE-6400 Specifications | Sony USA,
Sony Electronics Inc., “ILCE-6400 Specifications | Sony USA,” January
-
[62]
Available: https://www.sony.com/electronics/support/ e-mount-body-ilce-6000-series/ilce-6400/specifications 15
[Online]. Available: https://www.sony.com/electronics/support/ e-mount-body-ilce-6000-series/ilce-6400/specifications 15
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.