Handling Control System Uncertainty
Pith reviewed 2026-05-19 23:28 UTC · model grok-4.3
The pith
Handling uncertainty is essential to advanced control theory for practical applications
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
This article introduces the Handling Control System Uncertainty aspect of Advanced Control Theory for Practical Applications, emphasizing that control theory is even more charming as it is deeply rooted in practical applications and that its charms consist in both know-why and know-how.
What carries the argument
Handling Control System Uncertainty as the core mathematical methodology within Advanced Control Theory for Practical Applications, which addresses uncertainties to support real-world system performance.
If this is right
- Control systems gain improved reliability and operation when uncertainty is explicitly addressed in their theoretical framework.
- The fusion of control theory and practical applications is strengthened by focusing on uncertainty handling methods.
- Practical considerations such as maintenance and societal impact benefit from this specialized mathematical approach.
- Advanced control theory develops a distinct flavour by treating uncertainty as fundamental to real-world use.
Where Pith is reading between the lines
- This view suggests that control engineering curricula could include dedicated modules on practical uncertainty to better prepare students.
- It could extend to testing in specific domains like autonomous vehicles, where comparing performance with and without dedicated uncertainty handling would be observable.
- Neighbouring areas such as robotics may adopt similar introductory treatments to improve system robustness in uncertain environments.
Load-bearing premise
That control theory for practical applications requires a distinct introductory treatment of uncertainty handling separate from standard considerations in the field.
What would settle it
A survey of advanced control theory literature showing that uncertainty is already covered comprehensively without needing a separate introductory aspect would challenge the premise for this distinct treatment.
Figures












read the original abstract
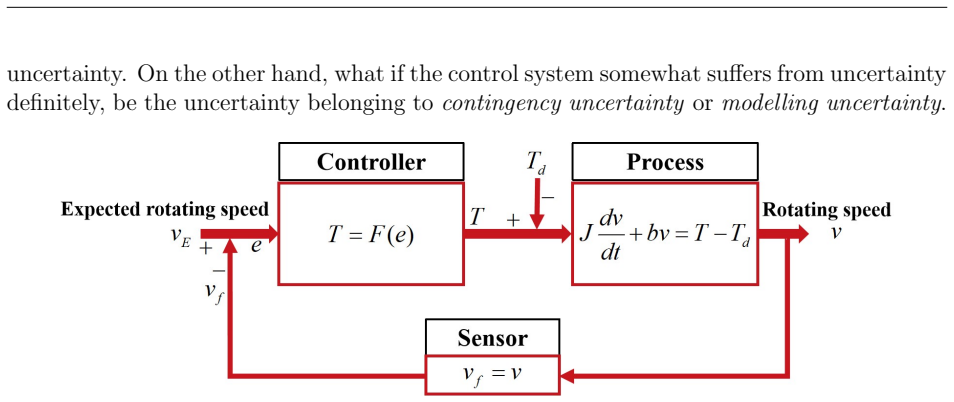
Control science is a core representative of the third industrial revolution and is so important to modern civilization. Control systems are the main subject of control science and may involve many aspects of consideration, such as hardware consideration, software consideration, operation consideration, maintenance consideration, economy consideration, society consideration. However, besides all such aspects of consideration, one aspect that is most essential to the control system is methodology consideration in mathematical sense, knowledge on which is what we refer to as control theory. Besides its importance from the mathematical perspective, control theory is even more charming as it is deeply rooted in practical applications. Charms of control theory consist in both know-why and know-how and it is the fusion of control theory and practical applications that highlights such charms. Control theory for practical applications, especially when somewhat with so-called ``advanced'' flavour, involves several fundamental aspects. This article introduces the Handling Control System Uncertainty aspect of Advanced Control Theory for Practical Applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript provides a high-level motivational overview of control science as central to modern civilization and practical applications, enumerating considerations such as hardware, software, operation, maintenance, economy, and society, before stating that control theory is the mathematical methodology aspect and announcing that the article introduces the 'Handling Control System Uncertainty' aspect of Advanced Control Theory for Practical Applications.
Significance. The importance of uncertainty handling in control systems is well-recognized in the field, but the manuscript advances no new methods, theorems, algorithms, empirical results, or even a structured review; its contribution is limited to restating the general relevance of the topic without adding technical substance.
major comments (1)
- Abstract: the central claim that 'This article introduces the Handling Control System Uncertainty aspect' is not borne out by the text, which offers only general statements about control theory and lists of considerations without any specific framework, model, equation, or example for uncertainty handling.
minor comments (1)
- The abstract contains awkward phrasing (e.g., 'somewhat with so-called ``advanced'' flavour') that reduces clarity; a more precise statement of scope would help.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback on our manuscript. We appreciate the recognition of the importance of uncertainty handling in control systems. Below we address the major comment point by point, providing our honest assessment and proposed revisions where appropriate.
read point-by-point responses
-
Referee: Abstract: the central claim that 'This article introduces the Handling Control System Uncertainty aspect' is not borne out by the text, which offers only general statements about control theory and lists of considerations without any specific framework, model, equation, or example for uncertainty handling.
Authors: We acknowledge that the current manuscript is primarily motivational and high-level, emphasizing the broader context of control science, practical considerations, and the role of mathematical methodology. The text positions uncertainty handling as an essential aspect of advanced control theory for practical applications by highlighting the fusion of theory and practice. However, we agree that the abstract's claim is not fully supported by specific technical content such as a framework, model, or example. We will revise the manuscript to include a dedicated section with an illustrative example or conceptual framework for handling control system uncertainty, thereby strengthening the alignment between the abstract and the body of the paper. revision: yes
Circularity Check
No significant circularity; purely introductory overview
full rationale
The paper contains no derivations, equations, fitted parameters, predictions, or self-citations. Its sole claim is that it introduces the topic of handling uncertainty as one aspect of advanced control theory for practical applications. This assertion is definitional to the paper's purpose and does not reduce to any prior input or fitted result. The text is a high-level motivational summary noting various considerations in control systems without advancing any technical framework that could exhibit circularity. No load-bearing steps exist to analyze.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Li.Advanced control theory for practical applications
H. Li.Advanced control theory for practical applications. Shanghai Jiao Tong University Press, 2026. [2]李颢.面向实际应用的高级控制理论(英文版).上海交通大学出版社, 2026
work page 2026
-
[2]
Li.Control theory for practical applications: with MATLAB demonstration programs
H. Li.Control theory for practical applications: with MATLAB demonstration programs. Springer, 2024. [4]李颢.面向实际应用的控制理论(英文版).上海交通大学出版社, 2024
work page 2024
-
[3]
T. Samad. A survey on industry impact and challenges thereof [technical activities]. IEEE Control Systems Magazine, 37(1):17–18, 2017
work page 2017
-
[4]
V. Utkin. Variable structure systems with sliding modes.IEEE Transactions on Auto- matic Control, 22(2):212–222, 1977
work page 1977
-
[5]
Utkin.Sliding modes in control and optimization
V. Utkin.Sliding modes in control and optimization. Springer-Verlag Berlin, 1992
work page 1992
-
[6]
Y. Shtessel, C. Edwards, L. Fridman, and A. Levant.Sliding mode control and observa- tion. Springer Science & Business Media, 2014
work page 2014
- [7]
-
[8]
G. Zames. Feedback and optimal sensitivity: Model reference transformations, multi- plicative seminorms, and approximate inverses.IEEE Transactions on Automatic Con- trol, 26(2):301–320, 1981
work page 1981
- [9]
-
[10]
G. Dullerud and F. Paganini.A course in robust control theory: a convex approach. Springer Science & Business Media, 2000
work page 2000
-
[11]
I. Petersen and C. Hollot. A Riccati equation approach to the stabilization of uncertain linear systems.Automatica, 22(4):397–411, 1986
work page 1986
-
[12]
Yang.Robust control of uncertain systems and its application (in Chinese)
Y. Yang.Robust control of uncertain systems and its application (in Chinese). Science Press, 2004
work page 2004
-
[13]
V. Kharitonov. Asymptotic stability of the equilibrium state of a family of systems of linear differential equations.Differentsial’nye Uravneniya, 14(11):2086–2088, 1978
work page 2086
-
[14]
R. Bellman and R. Kalaba. On adaptive control processes.IRE Transactions on Auto- matic Control, 4(2):1–9, 1959
work page 1959
-
[15]
K. Astrom and B. Wittenmark.Adaptive control. Dover Publications, Inc. N.Y., 2008
work page 2008
-
[16]
T. Chai and H. Yue.Adaptive control (in Chinese). Tsinghua University Press, 2016. References 77
work page 2016
-
[17]
K. Astrom and P. Eykhoff. System identification—a survey.Automatica, 7(2):123–162, 1971
work page 1971
-
[18]
Ljung.System identification: Theory for the user
L. Ljung.System identification: Theory for the user. Englewood Cliffs, N.J.: Prentice Hall, 1987
work page 1987
-
[19]
S. Prajna. Barrier certificates for nonlinear model validation.Automatica, 42(1):117– 126, 2006
work page 2006
-
[20]
A. Ames, X. Xu, J. Grizzle, and P. Tabuada. Control barrier function based quadratic programs for safety critical systems.IEEE Transactions on Automatic Control, 62(8):3861–3876, 2017
work page 2017
-
[21]
A. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada. Control barrier functions: theory and applications. InEuropean Control Conference, pages 3420– 3431, 2019
work page 2019
- [22]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.