Distributed Multi-Coverage for Robot Swarms
Pith reviewed 2026-05-22 09:24 UTC · model grok-4.3
The pith
A distributed algorithm enables robot swarms to achieve multi-coverage of critical assets using only local sensing and communication.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
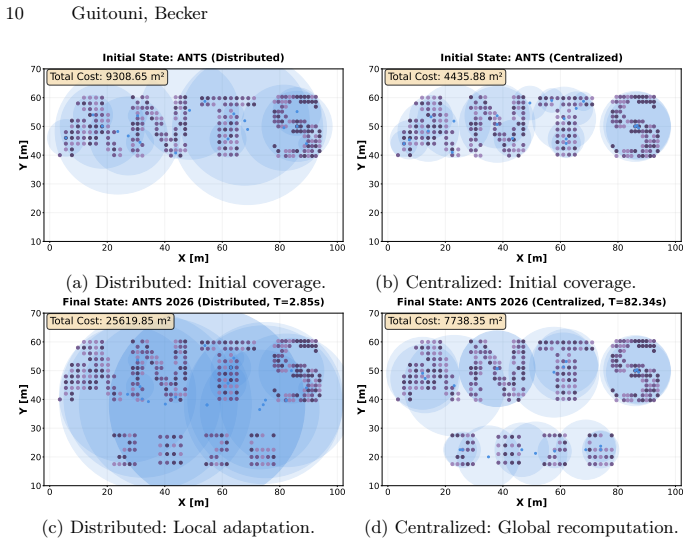
The authors present a distributed multicoverage algorithm that operates under local sensing, local communication, and no global coordination to provide varying levels of coverage redundancy for assets based on their importance.
What carries the argument
The distributed multicoverage algorithm that coordinates coverage through local interactions among robots.
If this is right
- Coverage can continue despite individual robot failures without aborting the mission.
- Computation and communication stay limited to local ranges, fitting onboard hardware constraints.
- Assets can have different coverage requirements depending on their priority without needing a central optimizer.
Where Pith is reading between the lines
- Similar local-rule approaches might apply to other swarm tasks such as area exploration or object transport.
- Real-world testing on physical drones could reveal how well the algorithm handles noise in sensing and communication.
- Integration with path planning methods could allow the swarm to both cover and move between areas dynamically.
Load-bearing premise
That robots can achieve the required global coverage levels through decisions based solely on local information without any central oversight.
What would settle it
Running the algorithm in a simulation or real swarm and checking if every asset receives the specified number of observing robots; failure to do so for a significant fraction of assets would disprove the effectiveness.
Figures




read the original abstract
Autonomous drone swarms deployed for surveillance, environmental monitoring, and infrastructure inspection must maintain reliable coverage of critical assets despite robot failures. This requires multicoverage: each asset must be observed by multiple robots for redundancy, with coverage requirements varying by asset importance. While recent work has solved the centralized problem optimally using integer programming, practical deployments face constraints that demand distributed solutions: robots operate with limited communication ranges, onboard computation restricts global planning, and partial system failures must not cause mission abort. We present a distributed multicoverage algorithm for robot swarms operating with local sensing, local communication, and no global coordination.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a distributed multicoverage algorithm for robot swarms that ensures each asset is observed by a required number of robots for redundancy. The approach operates using only local sensing, local communication, and no global coordination, addressing practical constraints such as limited communication ranges, onboard computation limits, and tolerance to partial robot failures.
Significance. If the algorithm and its local update rules are correct as presented, this would be a useful contribution to swarm robotics by providing a decentralized method for fault-tolerant multi-coverage that scales without centralized planning, directly supporting applications in surveillance and monitoring where global coordination is infeasible.
minor comments (3)
- [Algorithm] The description of the local update rules in the algorithm section would benefit from pseudocode or a step-by-step breakdown to improve clarity and reproducibility.
- [Evaluation] Simulation results should include quantitative metrics such as convergence time and coverage ratio under varying failure rates to strengthen the validation of the failure-handling logic.
- [Related Work] A brief comparison table with the centralized integer programming baseline would help contextualize the performance trade-offs of the distributed approach.
Simulated Author's Rebuttal
We thank the referee for their positive summary of our work and for recommending minor revision. We appreciate the recognition of the practical constraints addressed by our distributed multicoverage approach.
Circularity Check
No significant circularity detected
full rationale
The manuscript presents a distributed multicoverage algorithm for robot swarms using local sensing and communication rules. No equations, predictions, or first-principles derivations appear that reduce to fitted inputs or self-citations by construction. The central claim is the direct description of the algorithm and its failure-handling logic, which is self-contained without invoking uniqueness theorems or renaming known results. Independent support exists in the local update rules described.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
IEEE Access10, 121301–121317 (2022)
Chen, X., Hopkins, B., Wang, H., O’Neill, L., Afghah, F., Razi, A., Fulé, P., Coen, J., Rowell, E., Watts, A.: Wildland fire detection and monitoring using a drone-collected RGB/IR image dataset. IEEE Access10, 121301–121317 (2022). https://doi.org/10.1109/ACCESS.2022.3222805
-
[2]
IEEE Transactions on Robotics and Automation20(2), 243–255 (2004)
Cortés, J., Martínez, S., Karatas, T., Bullo, F.: Coverage control for mobile sensing networks. IEEE Transactions on Robotics and Automation20(2), 243–255 (2004). https://doi.org/10.1109/TRA.2004.824698
-
[3]
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp
Guitouni, M., Loi, C.M., Fekete, S.P., Perk, M., Becker, A.T.: Multi-covering a point set bymdisks with minimum total area. 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, pp. 3000-3006 (2025), doi:10.1109/ICRA55743.2025.11127835
-
[4]
Mobile Networks and Applications10(4), 519–528 (2005)
Huang, C.F., Tseng, Y.C.: The coverage problem in a wireless sen- sor network. Mobile Networks and Applications10(4), 519–528 (2005). https://doi.org/10.1007/s11036-005-1564-y
-
[5]
Khan, M.A., Qureshi, I.M., Khanzada, F.: A hybrid communication scheme for efficient and low-cost deployment of future flying ad-hoc network (FANET). Drones3(1) (2019). https://doi.org/10.3390/drones3010016,https://www.mdpi. com/2504-446X/3/1/16
-
[6]
IEEE Transactions on Robotics31(2), 489–493 (2015)
Lee, S.K., Diaz-Mercado, Y., Egerstedt, M.: Multirobot control using time- varying density functions. IEEE Transactions on Robotics31(2), 489–493 (2015). https://doi.org/10.1109/TRO.2015.2397771
-
[7]
Lloyd, S.: Least squares quantization in PCM. IEEE Transactions on Information Theory28(2), 129–137 (1982). https://doi.org/10.1109/TIT.1982.1056489
-
[8]
Scientific Reports15(1), 29052 (2025)
Priyadarshi, R.: Efficient node deployment for enhancing coverage and connectivity in wireless sensor networks. Scientific Reports15(1), 29052 (2025). https://doi.org/10.1038/s41598-025-14252-0,https://doi.org/10.1038/ s41598-025-14252-0
-
[9]
In: 2025 IEEE 21st International Conference on Automation Science and Engineer- ing (CASE)
Shahsavar, M., Rajasekaran, S., Kabin, R., Yannuzzi, M., Becker, A.T.: Tracking multiple moving assets with a smaller group of drones. In: 2025 IEEE 21st International Conference on Automation Science and Engineer- ing (CASE). pp. 171–178. IEEE, Los Angeles, CA, USA (August 2025). https://doi.org/10.1109/CASE58245.2025.11164124
-
[10]
In: Proceedings of IEEE International Conference on Communications (ICC)
Slijepcevic, S., Potkonjak, M.: Power efficient organization of wireless sensor net- works. In: Proceedings of IEEE International Conference on Communications (ICC). vol. 2, pp. 472–476. IEEE (2001). https://doi.org/10.1109/ICC.2001.936985
-
[11]
New Results and New Trends in Computer Science (1991)
Welzl, E.: Smallest enclosing disks (balls and ellipsoids). New Results and New Trends in Computer Science (1991). https://doi.org/https://doi.org/10.1007/BFb0038202
-
[12]
Civil Engineering Mag- azine87(6), 42–45 (2017)
Witcher, T.: An icon at 80: The golden gate bridge. Civil Engineering Mag- azine87(6), 42–45 (2017). https://doi.org/10.1061/ciegag.0001205,https:// ascelibrary.org/doi/abs/10.1061/ciegag.0001205
-
[13]
IEEE Robotics and Automa- tion Letters2(2), 1047–1054 (2017)
Zhou, D., Wang, Z., Bandyopadhyay, S., Schwager, M.: Fast, on-line collision avoid- ance for dynamic vehicles using buffered voronoi cells. IEEE Robotics and Automa- tion Letters2(2), 1047–1054 (2017). https://doi.org/10.1109/LRA.2017.2656241
-
[14]
Applied Sciences14(5), 1722 (2024)
Zhou, J., Deng, H., Zhao, Z., Zou, Y., Wang, X.: Sensor placement optimization of visual sensor networks for target tracking based on multi-objective constraints. Applied Sciences14(5), 1722 (2024). https://doi.org/10.3390/app14051722
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.