Propeller-Assisted Robust 3D Hopping Robot with Hierarchical Force Allocation
Pith reviewed 2026-06-27 19:15 UTC · model grok-4.3
The pith
Propeller-assisted monopedal robot achieves sustained 3D hopping by hierarchically allocating leg contact forces and tri-rotor thrusts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By coordinating the leg-generated contact wrench with auxiliary tri-rotor thrusts through a hierarchical allocation strategy derived from the single rigid body model, the robot maintains attitude stability and generates the necessary impulses for continuous 3D hopping even though it is underactuated during flight phases.
What carries the argument
Hierarchical Force Allocation (HFA) framework on the single rigid body model, which lets the leg produce the main stance contact wrench while the tri-rotor supplies auxiliary attitude regulation during both stance and flight.
If this is right
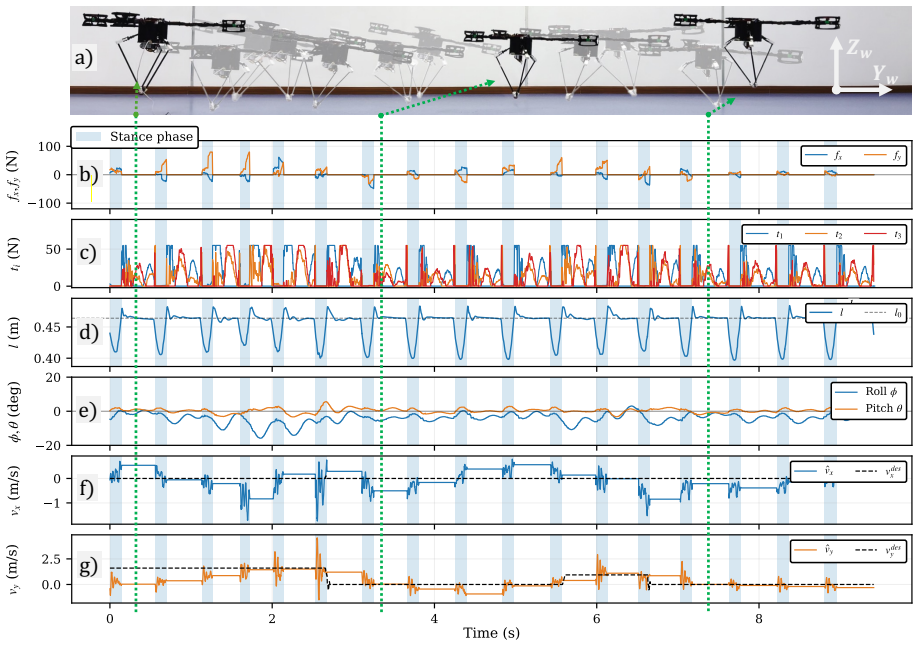
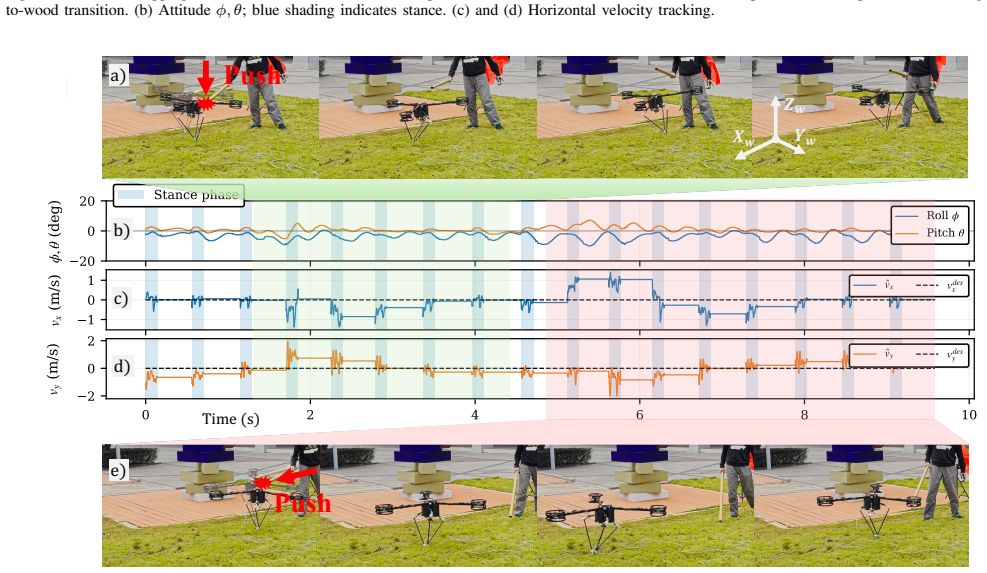
- The robot performs sustained 3D hopping with terrain transitions and recovers from impulsive disturbances.
- Propeller assistance supplies the missing control authority during flight phases.
- The leg and tri-rotor roles remain coordinated without requiring full dynamic replanning at each step.
- Robustness holds under unmodeled contacts because the tri-rotor corrects residual moments after leg force allocation.
- The same allocation structure applies to repeated hops without manual tuning between indoor and outdoor conditions.
Where Pith is reading between the lines
- The approach could extend to other underactuated legged platforms that add auxiliary thrust actuators for attitude.
- Hybrid force-thrust allocation may reduce the need for high-bandwidth leg controllers in dynamic locomotion.
- Placement and sizing of the tri-rotor could be optimized to lower overall energy use while preserving recovery capability.
- Similar hierarchical schemes might help bipeds or quadrupeds that incorporate propellers for balance on rough ground.
Load-bearing premise
The single rigid body model stays accurate enough during the short stance phase even when real terrain produces unmodeled contact forces.
What would settle it
An experiment in which the robot loses attitude control or fails to sustain hopping when the tri-rotor is disabled, or when the SRB-based allocation produces instability on uneven surfaces.
Figures




read the original abstract
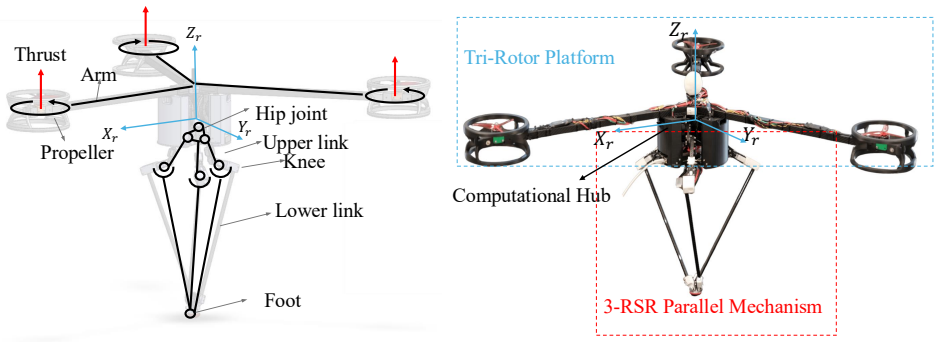
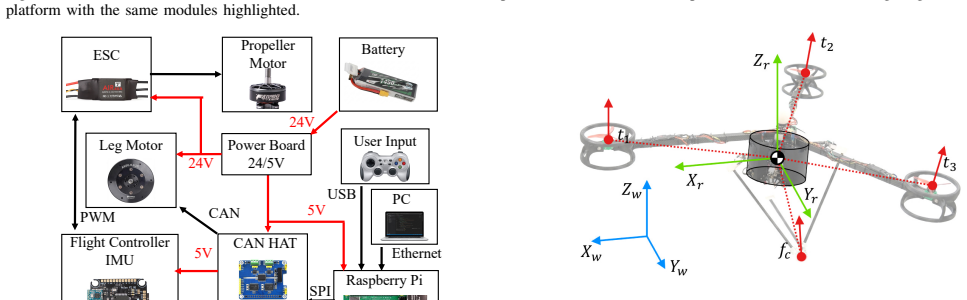
Monopedal hopping robots are conceptually simple but highly dynamic and inherently unstable. Achieving robust 3D hopping is still difficult because ground reaction forces are available only during the short stance phase, while the robot is underactuated in flight. A key unresolved issue is how to improve flight-phase control authority. Propeller assistance provides a promising solution, but it requires careful coordination of leg-generated contact forces and propeller thrusts across stance and flight. This paper presents Pro-OMEGA2, a propeller-assisted 3D monopedal hopping robot with an active 3-RSR parallel leg and a trunk-mounted tri-rotor for auxiliary attitude regulation. To address the force coordination challenge, we propose a Hierarchical Force Allocation (HFA) framework based on a single rigid body (SRB) model. The leg generates the main stance contact wrench, while the tri-rotor provides auxiliary attitude regulation, compensating the residual attitude moment in stance and maintaining attitude during flight. Real-robot experiments in indoor and outdoor scenarios demonstrate sustained 3D hopping, including terrain transitions and impulsive push recovery, validating robustness under unmodeled contact and external disturbances.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Pro-OMEGA2, a monopedal hopping robot with an active 3-RSR parallel leg and trunk-mounted tri-rotor. It proposes a Hierarchical Force Allocation (HFA) framework based on a single rigid body (SRB) model in which the leg supplies the primary stance wrench while the tri-rotor compensates residual moments in stance and provides attitude control in flight. Real-robot experiments in indoor and outdoor settings are reported to demonstrate sustained 3D hopping, terrain transitions, and recovery from impulsive pushes, with the claim that the approach is robust to unmodeled contacts and disturbances.
Significance. If the experimental claims are substantiated with quantitative evidence, the work would offer a concrete coordination strategy for augmenting underactuated dynamic legged systems with auxiliary propulsion, addressing a persistent limitation in flight-phase authority for hopping robots.
major comments (2)
- [Experimental validation section] Experimental validation section: the abstract asserts that experiments 'validate robustness under unmodeled contact and external disturbances' yet supplies no quantitative metrics (e.g., stance-phase residual wrench norms, predicted-vs-measured force error, tri-rotor saturation frequency, or success rate across trials), leaving the central robustness claim without measurable support.
- [HFA framework description] HFA framework description: the allocation strategy presupposes that the SRB model remains sufficiently accurate during the brief stance phase so that the tri-rotor can compensate residuals; no verification (model-error bounds, contact-force mismatch measurements, or authority-margin analysis) is provided to confirm this assumption holds on real terrain where contacts deviate from the model.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and will revise the paper to incorporate additional quantitative analysis and verification where appropriate.
read point-by-point responses
-
Referee: [Experimental validation section] Experimental validation section: the abstract asserts that experiments 'validate robustness under unmodeled contact and external disturbances' yet supplies no quantitative metrics (e.g., stance-phase residual wrench norms, predicted-vs-measured force error, tri-rotor saturation frequency, or success rate across trials), leaving the central robustness claim without measurable support.
Authors: We acknowledge that the manuscript would benefit from explicit quantitative metrics to support the robustness claims. In the revised version we will add success rates across trials, stance-phase residual wrench norms, predicted-vs-measured force errors, and tri-rotor saturation statistics drawn from the existing experimental dataset. revision: yes
-
Referee: [HFA framework description] HFA framework description: the allocation strategy presupposes that the SRB model remains sufficiently accurate during the brief stance phase so that the tri-rotor can compensate residuals; no verification (model-error bounds, contact-force mismatch measurements, or authority-margin analysis) is provided to confirm this assumption holds on real terrain where contacts deviate from the model.
Authors: The referee correctly notes the absence of explicit verification for the SRB model accuracy assumption. We will include model-error bounds, contact-force mismatch measurements, and authority-margin analysis in the revised manuscript to substantiate that the tri-rotor compensation remains effective under real-terrain deviations. revision: yes
Circularity Check
No significant circularity; framework and validation are independent of fitted inputs
full rationale
The paper describes a robot design (Pro-OMEGA2) and proposes the HFA framework based on an SRB model for force coordination between leg and tri-rotor. The central claim rests on real-robot experiments demonstrating sustained 3D hopping under disturbances. No equations, fitted parameters, self-citations, or derivation steps are visible in the abstract or description that would reduce any prediction or result to its own inputs by construction. The validation is empirical and externally falsifiable via hardware tests, making the work self-contained against the listed circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Experiments in balance with a 3d one-legged hopping machine,
M. H. Raibert, H. B. Brown Jr, and M. Chepponis, “Experiments in balance with a 3d one-legged hopping machine,”The International Journal of Robotics Research, vol. 3, no. 2, pp. 75–92, 1984
1984
-
[2]
M. H. Raibert,Legged robots that balance. MIT press, 1986
1986
-
[3]
Robotic vertical jumping agility via series-elastic power modulation,
D. W. Haldane, M. M. Plecnik, J. K. Yim, and R. S. Fearing, “Robotic vertical jumping agility via series-elastic power modulation,”Science Robotics, vol. 1, no. 1, p. eaag2048, 2016
2016
-
[4]
Untethered one-legged hopping in 3d using linear elastic actuator in parallel (leap),
Z. Batts, J. Kim, and K. Yamane, “Untethered one-legged hopping in 3d using linear elastic actuator in parallel (leap),” inInternational Symposium on Experimental Robotics. Springer, 2016, pp. 103–112
2016
-
[5]
Goat: A legged robot with 3d agility and virtual com- pliance,
S. Kalouche, “Goat: A legged robot with 3d agility and virtual com- pliance,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 4110–4117
2017
-
[6]
Omega: open-source and multi-mode hopping platform for educa- tional and groundwork aims,
X. Chu, F. Y . Wong, C. Y . Fan, H. Zhang, Y . Chen, and K. S. Au, “Omega: open-source and multi-mode hopping platform for educa- tional and groundwork aims,”IEEE Robotics and Automation Letters, 2025
2025
-
[7]
Sigma: a minimalistic 3d hopping robot with parallel 3-rsr mechanism for safeguarding humanitarian demining,
C. I. Fan, X. Chu, F. F. Wong, F. Shi, and K. S. Au, “Sigma: a minimalistic 3d hopping robot with parallel 3-rsr mechanism for safeguarding humanitarian demining,” in2024 IEEE International Symposium on Safety Security Rescue Robotics (SSRR). IEEE, 2024, pp. 104–109
2024
-
[8]
Tail-assisted pitch control in lizards, robots and dinosaurs,
T. Libby, T. Y . Moore, E. Chang-Siu, D. Li, D. J. Cohen, A. Jusufi, and R. J. Full, “Tail-assisted pitch control in lizards, robots and dinosaurs,” Nature, vol. 481, no. 7380, pp. 181–184, 2012
2012
-
[9]
A lizard- inspired active tail enables rapid maneuvers and dynamic stabilization in a terrestrial robot,
E. Chang-Siu, T. Libby, M. Tomizuka, and R. J. Full, “A lizard- inspired active tail enables rapid maneuvers and dynamic stabilization in a terrestrial robot,” in2011 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2011, pp. 1887–1894
2011
-
[10]
Tail assisted dynamic self righting,
A. M. Johnson, T. Libby, E. Chang-Siu, M. Tomizuka, R. J. Full, and D. E. Koditschek, “Tail assisted dynamic self righting,” inAdaptive mobile robotics. World Scientific, 2012, pp. 611–620
2012
-
[11]
Null-space-avoidance- based orientation control framework for underactuated, tail-inspired robotic systems in flight phase,
X. Chu, C. H. D. Lo, C. Ma, and K. W. S. Au, “Null-space-avoidance- based orientation control framework for underactuated, tail-inspired robotic systems in flight phase,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3916–3923, 2019
2019
-
[12]
Towards safe landing of falling quadruped robots using a 3-dof morphable inertial tail,
Y . Tang, J. An, X. Chu, S. Wang, C. Y . Wong, and K. S. Au, “Towards safe landing of falling quadruped robots using a 3-dof morphable inertial tail,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 1141–1147
2023
-
[13]
On quadruped attitude dynamics and control using reaction wheels and tails,
K. Machairas and E. Papadopoulos, “On quadruped attitude dynamics and control using reaction wheels and tails,” in2015 European Control Conference (ECC). IEEE, 2015, pp. 753–758
2015
-
[14]
Enhanced balance for legged robots using reaction wheels,
C.-Y . Lee, S. Yang, B. Bokser, and Z. Manchester, “Enhanced balance for legged robots using reaction wheels,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 9980–9987
2023
-
[15]
Monopod robot prototype with reaction wheel for hopping and posture stabilisation,
A. Anzai, T. Doi, K. Hashida, X. Chen, L. Han, and K. Hashimoto, “Monopod robot prototype with reaction wheel for hopping and posture stabilisation,”International Journal of Mechatronics and Au- tomation, vol. 8, no. 4, pp. 163–174, 2021
2021
-
[16]
Combining tail and reaction wheel for underactuated spatial reorientation in robot falling with quadratic programming,
X. Chu, S. Wang, R. Ng, C. Y . Fan, J. An, and K. S. Au, “Combining tail and reaction wheel for underactuated spatial reorientation in robot falling with quadratic programming,”IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7783–7790, 2023
2023
-
[17]
Pogodrone: Design, model, and control of a jumping quadrotor,
B. Zhu, J. Xu, A. Charway, and D. Salda ˜na, “Pogodrone: Design, model, and control of a jumping quadrotor,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 2031–2037
2022
-
[18]
An agile monopedal hopping quadcopter with synergistic hybrid locomotion,
S. Bai, Q. Pan, R. Ding, H. Jia, Z. Yang, and P. Chirarattananon, “An agile monopedal hopping quadcopter with synergistic hybrid locomotion,”Science robotics, vol. 9, no. 89, p. eadi8912, 2024
2024
-
[19]
Terrestrial locomotion of pogox: From hardware design to energy shaping and step-to-step dynamics based control,
Y . Wang, J. Kang, Z. Chen, and X. Xiong, “Terrestrial locomotion of pogox: From hardware design to energy shaping and step-to-step dynamics based control,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 3419–3425
2024
-
[20]
Appending propellers to leg for enhancing robustness of hopping locomotion,
Y . Chen, Z. Chen, Y . Tang, K. W. Samuel Au, and X. Chu, “Appending propellers to leg for enhancing robustness of hopping locomotion,” in Climbing and Walking Robots Conference. Springer, 2025, pp. 162– 173
2025
-
[21]
A bipedal walking robot that can fly, slackline, and skateboard,
K. Kim, P. Spieler, E.-S. Lupu, A. Ramezani, and S.-J. Chung, “A bipedal walking robot that can fly, slackline, and skateboard,”Science Robotics, vol. 6, no. 59, p. eabf8136, 2021
2021
-
[22]
Dynamic locomotion in the mit cheetah 3 through convex model-predictive control,
J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic locomotion in the mit cheetah 3 through convex model-predictive control,” in2018 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2018, pp. 1–9
2018
-
[23]
Momentum control of an underactuated flying humanoid robot,
D. Pucci, S. Traversaro, and F. Nori, “Momentum control of an underactuated flying humanoid robot,”IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 195–202, 2017
2017
-
[24]
Geometric tracking control of a quadrotor uav on se (3),
T. Lee, M. Leok, and N. H. McClamroch, “Geometric tracking control of a quadrotor uav on se (3),” in49th IEEE conference on decision and control (CDC). IEEE, 2010, pp. 5420–5425
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.