Expected Free Energy-based Planning as Variational Inference
Pith reviewed 2026-06-27 13:37 UTC · model grok-4.3
The pith
Minimizing variational free energy with epistemic priors decomposes into expected free energy plan costs plus a complexity term.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By augmenting the generative model with epistemic priors, the variational free energy functional decomposes into the expected free energy (which encodes both instrumental goal costs and epistemic information value) plus an explicit complexity term. This equivalence demonstrates that EFE-based planning is variational inference on that augmented model, thereby aligning planning with the same free-energy minimization that governs other active-inference operations.
What carries the argument
Epistemic priors on the generative model that produce the exact decomposition of variational free energy into expected free energy plus complexity.
Load-bearing premise
It is possible to choose epistemic priors for the generative model such that variational free energy minimization produces exactly the expected free energy objective plus an additional complexity term.
What would settle it
If the policies obtained by minimizing the proposed variational free energy on the T-maze do not match the policies obtained by direct expected free energy optimization, the claimed decomposition does not hold.
Figures




read the original abstract
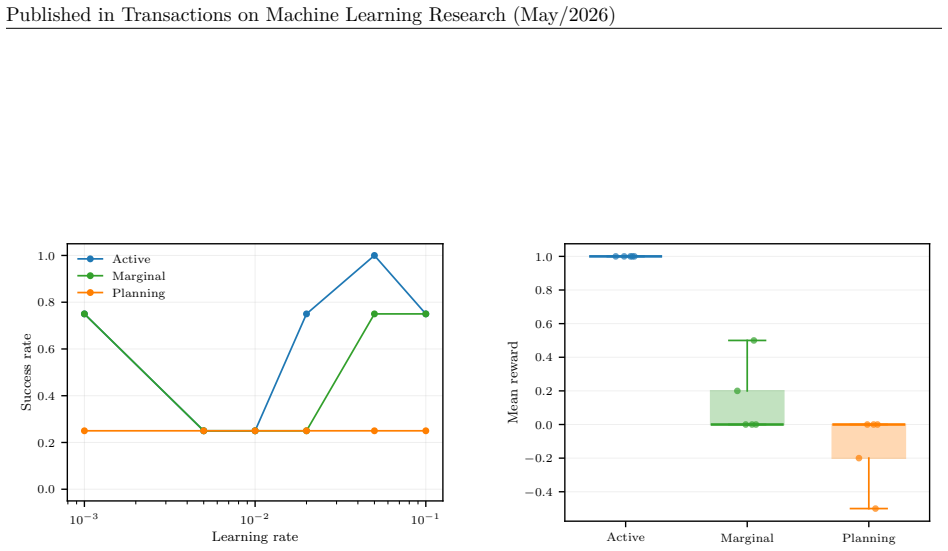
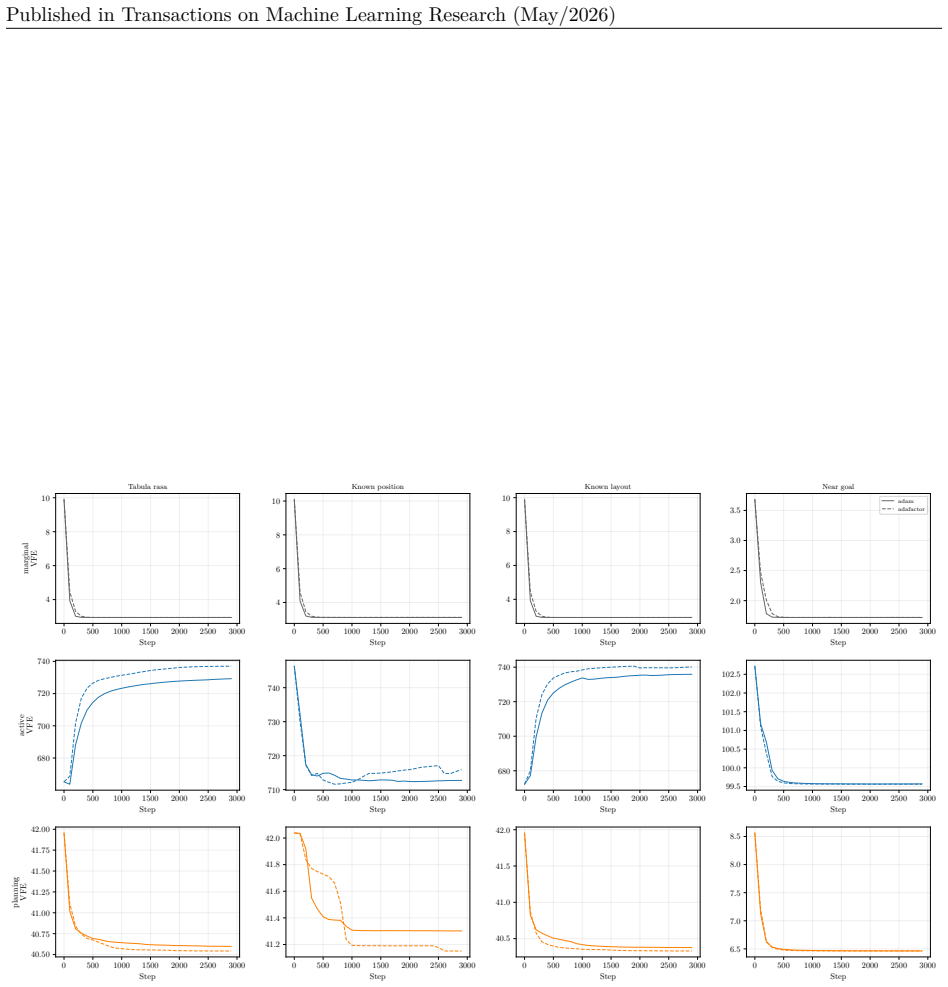
Planning under uncertainty requires agents to balance goal achievement with information gathering. Active inference addresses this through the Expected Free Energy (EFE), a cost function that unifies instrumental and epistemic objectives. However, existing EFE-based methods typically employ specialized optimization procedures that are difficult to extend or analyze. In this paper, we show that EFE-based planning can be formulated as Variational Free Energy minimization on a generative model augmented with epistemic priors. Our main result demonstrates that minimizing a Variational Free Energy functional with appropriately chosen priors yields a decomposition into expected plan costs (the EFE) plus a complexity term. This formulation reinforces theoretical consistency with the Free Energy Principle by casting planning as the same inferential process that governs perception and learning. We validate our approach on three environments of increasing complexity: a deterministic T-maze, a stochastic Reactivity Maze, and a partially observable MiniGrid DoorKey-8x8 environment. The experiments demonstrate that the epistemic priors induce information-seeking behavior, that the variational formulation yields policy-based inference outperforming plan-based methods under stochastic transitions, and that temporal factorization enables scalability to environments where existing tabular active inference methods cannot operate.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that EFE-based planning can be recast as standard variational inference by augmenting a generative model with epistemic priors; minimizing the resulting variational free energy then decomposes exactly into the expected free energy (instrumental plus epistemic value) plus a complexity term. This is presented as reinforcing consistency with the Free Energy Principle. The claim is supported by a derivation and by experiments on a deterministic T-maze, a stochastic Reactivity Maze, and a partially observable MiniGrid DoorKey-8x8 task, where the method induces information-seeking behavior and scales to settings where tabular active-inference planners fail.
Significance. If the epistemic-prior construction is non-circular and holds for arbitrary transition and observation models, the result would allow active-inference planning to reuse existing variational-inference toolchains rather than requiring specialized EFE optimizers, thereby tightening the link between planning and the broader FEP framework. The reported scalability gains on the MiniGrid environment constitute a concrete empirical contribution.
major comments (2)
- [§3.2, Eq. (11)–(13)] §3.2, Eq. (11)–(13): the epistemic prior p(o, s | π) is defined so that the cross terms between the variational distribution and the generative model cancel, recovering the standard EFE decomposition. It is not shown that this prior can be specified from the environment dynamics alone without reference to the target EFE functional; if the prior is chosen to enforce the desired cancellation, the claimed equivalence to ordinary variational inference is circular.
- [§4.1] §4.1, the three-environment validation: while the T-maze and Reactivity Maze results demonstrate information-seeking, the MiniGrid experiment reports only aggregate success rates without an ablation that isolates the contribution of the epistemic prior versus the complexity term. Consequently it remains unclear whether the reported outperformance under stochastic transitions is due to the variational formulation or to the specific prior construction.
minor comments (2)
- [§2.3] Notation for the policy-conditioned generative model is introduced in §2.3 but reused without re-statement in §3; a short reminder of the conditioning would improve readability.
- [Figure 3] Figure 3 caption states “temporal factorization enables scalability” but does not quantify the computational saving relative to the non-factorized baseline; adding wall-clock or iteration counts would strengthen the claim.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which have helped us improve the clarity and rigor of our manuscript. We address each of the major comments point by point below, indicating the revisions we plan to make.
read point-by-point responses
-
Referee: [§3.2, Eq. (11)–(13)] §3.2, Eq. (11)–(13): the epistemic prior p(o, s | π) is defined so that the cross terms between the variational distribution and the generative model cancel, recovering the standard EFE decomposition. It is not shown that this prior can be specified from the environment dynamics alone without reference to the target EFE functional; if the prior is chosen to enforce the desired cancellation, the claimed equivalence to ordinary variational inference is circular.
Authors: We agree that the construction of the epistemic prior requires careful justification to avoid any appearance of circularity. In our derivation, the epistemic prior is defined to encode the expected information gain under the policy, which is a standard component of the EFE in active inference literature. This prior is specified using the transition and observation models of the environment, augmented with the epistemic objective. The equivalence to variational inference then follows directly, allowing the use of standard VI toolchains. To address the referee's concern, we will revise the manuscript in §3.2 to include an explicit construction of the prior solely from the generative model and the information-theoretic definition of epistemic value, without presupposing the full EFE. This will demonstrate that the approach holds for arbitrary models and is not circular. revision: yes
-
Referee: [§4.1] §4.1, the three-environment validation: while the T-maze and Reactivity Maze results demonstrate information-seeking, the MiniGrid experiment reports only aggregate success rates without an ablation that isolates the contribution of the epistemic prior versus the complexity term. Consequently it remains unclear whether the reported outperformance under stochastic transitions is due to the variational formulation or to the specific prior construction.
Authors: We acknowledge that the MiniGrid results would benefit from an ablation study to isolate the effects. The reported outperformance is attributed to the variational formulation enabling policy-based inference, which scales better than plan-based methods in stochastic settings. However, to clarify the role of the epistemic prior, we will add an ablation in the revised version comparing performance with and without the epistemic prior (i.e., setting the prior to uniform). This will include additional analysis of information-seeking behavior in the MiniGrid environment. revision: yes
Circularity Check
Priors selected to force VFE minimization to recover EFE + complexity term make the decomposition hold by construction
specific steps
-
self definitional
[Abstract]
"Our main result demonstrates that minimizing a Variational Free Energy functional with appropriately chosen priors yields a decomposition into expected plan costs (the EFE) plus a complexity term."
The priors are stipulated as 'appropriately chosen' exactly so that VFE minimization produces the EFE decomposition. This makes the claimed equivalence tautological: the functional form of the priors is reverse-engineered to cancel cross terms and recover the standard EFE expression, rather than being independently motivated and then shown to yield the result.
full rationale
The paper's main result states that augmenting the generative model with 'appropriately chosen' epistemic priors allows VFE minimization to decompose into the EFE plus a complexity term. This is self-definitional because the priors are defined precisely so that all cross terms cancel to yield the standard EFE (instrumental + epistemic value) without residual dependence on the variational distribution. The equivalence is therefore enforced by the choice of priors rather than derived from independent assumptions on arbitrary transition/observation models. No external verification or parameter-free justification is provided for the priors' existence or form outside the target EFE objective.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Planning can be cast as inference under the Free Energy Principle
invented entities (1)
-
epistemic priors
no independent evidence
Reference graph
Works this paper leans on
-
[1]
and Shipp, Stewart and Friston, Karl J
Adams, Rick A. and Shipp, Stewart and Friston, Karl J. , year = 2013, journal =. Predictions Not Commands: Active Inference in the Motor System , shorttitle =. doi:10.1007/s00429-012-0475-5 , urldate =
-
[2]
and Murphy, Kevin , year = 2018, month = jul, pages =
Alemi, Alexander and Poole, Ben and Fischer, Ian and Dillon, Joshua and Saurous, Rif A. and Murphy, Kevin , year = 2018, month = jul, pages =. Fixing a. Proceedings of the 35th
2018
-
[3]
Computationally Efficient Convolved Multiple Output
Alvarez, Mauricio A and Lawrence, Neil D , year = 2011, journal =. Computationally Efficient Convolved Multiple Output
2011
-
[4]
and Rosasco, Lorenzo and Lawrence, Neil D
Alvarez, Mauricio A. and Rosasco, Lorenzo and Lawrence, Neil D. , year = 2012, month = apr, number =. Kernels for. arXiv , langid =:1106.6251 , primaryclass =
Pith/arXiv arXiv 2012
-
[5]
, year = 2012, month = jun, pages =
Anandkumar, Animashree and Hsu, Daniel and Kakade, Sham M. , year = 2012, month = jun, pages =. A. Proceedings of the 25th
2012
-
[6]
Anil Meera, Ajith and Lanillos, Pablo , editor =. Towards. Active. doi:10.1007/978-3-031-47958-8_3 , abstract =
-
[7]
Natural Hierarchy Emerges from Energy Dispersal , author =. Biosystems , volume =. doi:10.1016/j.biosystems.2008.10.008 , urldate =
-
[8]
Antoy, Sergio and Hanus, Michael , editor =. Declarative. Logic. doi:10.1007/11680093_2 , abstract =
-
[9]
Planning by Probabilistic Inference , booktitle =
Attias, Hagai , year = 2003, pages =. Planning by Probabilistic Inference , booktitle =
2003
-
[10]
Reinforcement
Azizzadenesheli, Kamyar and Lazaric, Alessandro and Anandkumar, Animashree , year = 2016, month = jun, pages =. Reinforcement. Conference on
2016
-
[11]
Bagaev, Dmitry and. Reactive. doi:10.48550/arXiv.2112.13251 , urldate =. arXiv , keywords =:2112.13251 , primaryclass =
-
[12]
Bagaev, Dmitry and De Vries, Bert , editor =. Reactive. Scientific Programming , volume =. doi:10.1155/2023/6601690 , urldate =
-
[13]
Bagaev, Dmitry and. Software Impacts , volume =. doi:10.1016/j.simpa.2022.100299 , urldate =
-
[14]
doi:10.21105/joss.05161 , urldate =
Bagaev, Dmitry and Podusenko, Albert and de Vries, Bert , year = 2023, month = apr, journal =. doi:10.21105/joss.05161 , urldate =
-
[15]
ACM Computing Surveys (CSUR) , volume =
A Survey on Reactive Programming , author =. ACM Computing Surveys (CSUR) , volume =. doi:10.1145/2501654.2501666 , urldate =
-
[16]
and Simpson, Daniel and Rue, H
Bakka, Haakon and Vanhatalo, Jarno and Illian, Janine B. and Simpson, Daniel and Rue, H. Non-Stationary. Spatial Statistics , volume =. doi:10.1016/j.spasta.2019.01.002 , urldate =
-
[17]
and Daulton, Samuel and Letham, Benjamin and Wilson, Andrew Gordon and Bakshy, Eytan , year = 2020, month = dec, series =
Balandat, Maximilian and Karrer, Brian and Jiang, Daniel R. and Daulton, Samuel and Letham, Benjamin and Wilson, Andrew Gordon and Bakshy, Eytan , year = 2020, month = dec, series =. Proceedings of the 34th
2020
-
[18]
arXiv , keywords =:2111.10530 , primaryclass =
Kalman Filters as the Steady-State Solution of Gradient Descent on Variational Free Energy , author =. arXiv , keywords =:2111.10530 , primaryclass =
-
[19]
Reactive Probabilistic Programming , booktitle =
Baudart, Guillaume and Mandel, Louis and Atkinson, Eric and Sherman, Benjamin and Pouzet, Marc and Carbin, Michael , year = 2020, month = jun, series =. Reactive Probabilistic Programming , booktitle =. doi:10.1145/3385412.3386009 , urldate =
-
[20]
Beck, Jeff and Ramstead, Maxwell J. D. , year = 2025, month = feb, number =. Dynamic. doi:10.48550/arXiv.2502.21217 , urldate =. arXiv , keywords =:2502.21217 , primaryclass =
-
[21]
Bellman, Richard , year = 1966, journal =. Dynamic. 1719695 , eprinttype =
1966
-
[22]
Bulletin of the American Mathematical Society , volume =
The Theory of Dynamic Programming , author =. Bulletin of the American Mathematical Society , volume =. doi:10.1090/S0002-9904-1954-09848-8 , urldate =
-
[23]
Robustness in Identification and Control , author =
Robust Model Predictive Control:. Robustness in Identification and Control , author =. doi:10.1007/BFb0109870 , abstract =
-
[24]
Multidimensional Binary Search Trees Used for Associative Searching , author =. Commun. ACM , volume =. doi:10.1145/361002.361007 , urldate =
-
[25]
Dynamic Programming and Optimal Control:
Bertsekas, Dimitri , year = 2012, volume =. Dynamic Programming and Optimal Control:
2012
-
[26]
Julia: A Fresh Approach to Numerical Computing
Bezanson, Jeff and Edelman, Alan and Karpinski, Stefan and Shah, Viral B. , year = 2015, month = jul, number =. Julia:. doi:10.48550/arXiv.1411.1607 , urldate =. arXiv , keywords =:1411.1607 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1411.1607 2015
-
[27]
Bingham, Eli and Chen, Jonathan P and Jankowiak, Martin and Obermeyer, Fritz and Pradhan, Neeraj and Karaletsos, Theofanis and Singh, Rohit and Szerlip, Paul and Horsfall, Paul and Goodman, Noah D , year = 2019, journal =. Pyro:
2019
-
[28]
Pattern Recognition and Machine Learning , author =
-
[29]
, year = 2011, month = dec, journal =
Blackmore, Lars and Ono, Masahiro and Williams, Brian C. , year = 2011, month = dec, journal =. Chance-. doi:10.1109/TRO.2011.2161160 , urldate =
-
[30]
Blei, David M. and Jordan, Michael I. , year = 2006, month = mar, journal =. Variational Inference for. doi:10.1214/06-BA104 , urldate =
-
[31]
Journal of the American Statistical Association , author =
Blei, David M. and Kucukelbir, Alp and McAuliffe, Jon D. , year = 2017, month = apr, journal =. Variational. doi:10.1080/01621459.2017.1285773 , urldate =
-
[32]
Bliznyuk, Nikolay and Ruppert, David and Shoemaker, Christine and Regis, Rommel and Wild, Stefan and Mugunthan, Pradeep , year = 2008, month = jun, journal =. Bayesian. doi:10.1198/106186008X320681 , urldate =
-
[33]
Biosystems Engineering , volume =
Minimising the Non-Working Distance Travelled by Machines Operating in a Headland Field Pattern , author =. Biosystems Engineering , volume =. doi:10.1016/j.biosystemseng.2008.06.008 , urldate =
-
[34]
Bolin, David and Lindgren, Finn , year = 2011, journal =. Spatial. 23024839 , eprinttype =
2011
-
[35]
Artificial Intelligence , volume =
Planning as Heuristic Search , author =. Artificial Intelligence , volume =. doi:10.1016/S0004-3702(01)00108-4 , urldate =
-
[36]
Multi-Task
Bonilla, Edwin V and Chai, Kian and Williams, Christopher , year = 2007, volume =. Multi-Task. Advances in
2007
-
[37]
The International Journal of Robotics Research , volume =
Closing the Learning-Planning Loop with Predictive State Representations , author =. The International Journal of Robotics Research , volume =. doi:10.1177/0278364911404092 , urldate =
-
[38]
Mat\'ern
Borovitskiy, Viacheslav and Terenin, Alexander and Mostowsky, Peter and Deisenroth, Marc Peter , year = 2020, month = dec, series =. Mat\'ern. Proceedings of the 34th
2020
-
[39]
Trends in Cognitive Sciences , volume =
Planning as Inference , author =. Trends in Cognitive Sciences , volume =. doi:10.1016/j.tics.2012.08.006 , urldate =
-
[40]
Generating Sentences from a Continuous Space , booktitle =
Bowman, Samuel and Vilnis, Luke and Vinyals, Oriol and Dai, Andrew and Jozefowicz, Rafal and Bengio, Samy , year = 2016, pages =. Generating Sentences from a Continuous Space , booktitle =
2016
-
[41]
Bradbury, James and Frostig, Roy and Hawkins, Peter and Johnson, Matthew James and Leary, Chris and Maclaurin, Dougal and Necula, George and Paszke, Adam and VanderPlas, Jake and
-
[42]
Brockman, Greg and Cheung, Vicki and Pettersson, Ludwig and Schneider, Jonas and Schulman, John and Tang, Jie and Zaremba, Wojciech , year = 2016, month = jun, number =. doi:10.48550/arXiv.1606.01540 , urldate =. arXiv , keywords =:1606.01540 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1606.01540 2016
-
[43]
Scalable
Bruinsma, Wessel and Perim, Eric and Tebbutt, William and Hosking, Scott and Solin, Arno and Turner, Richard , year = 2020, month = nov, pages =. Scalable. Proceedings of the 37th
2020
-
[44]
and Kim, Chang Sub and McGregor, Simon and Seth, Anil K
Buckley, Christopher L. and Kim, Chang Sub and McGregor, Simon and Seth, Anil K. , year = 2017, month = dec, journal =. The Free Energy Principle for Action and Perception:. doi:10.1016/j.jmp.2017.09.004 , urldate =
-
[45]
and Nguyen, Cuong V
Bui, Thang D. and Nguyen, Cuong V. and Turner, Richard E. , year = 2017, month = dec, series =. Streaming Sparse. Proceedings of the 31st
2017
-
[46]
Finding the Outliers in Scanpath Data , booktitle =
Burch, Michael and Kumar, Ayush and Mueller, Klaus and Kervezee, Titus and Nuijten, Wouter and Oostenbach, Rens and Peeters, Lucas and Smit, Gijs , year = 2019, month = jun, series =. Finding the Outliers in Scanpath Data , booktitle =. doi:10.1145/3317958.3318225 , urldate =
-
[47]
Carpenter, Bob and Gelman, Andrew and Hoffman, Matthew D. and Lee, Daniel and Goodrich, Ben and Betancourt, Michael and Brubaker, Marcus and Guo, Jiqiang and Li, Peter and Riddell, Allen , year = 2017, journal =. doi:10.18637/jss.v076.i01 , urldate =
-
[48]
Stochastic Versions of the Em Algorithm: An Experimental Study in the Mixture Case , shorttitle =
Celeux,. Stochastic Versions of the Em Algorithm: An Experimental Study in the Mixture Case , shorttitle =. Journal of Statistical Computation and Simulation , volume =. doi:10.1080/00949659608811772 , urldate =
-
[49]
Champion, Th. Branching. Neural Networks , volume =. doi:10.1016/j.neunet.2022.03.036 , urldate =
-
[50]
Chang, Huiwen and Zhang, Han and Barber, Jarred and Maschinot, A. J. and Lezama, Jose and Jiang, Lu and Yang, Ming-Hsuan and Murphy, Kevin and Freeman, William T. and Rubinstein, Michael and Li, Yuanzhen and Krishnan, Dilip , year = 2023, month = jan, number =. Muse:. doi:10.48550/arXiv.2301.00704 , urldate =. arXiv , keywords =:2301.00704 , primaryclass =
-
[51]
Chen, Fan and Wang, Huan and Xiong, Caiming and Mei, Song and Bai, Yu , year = 2023, month = jul, pages =. Lower. Proceedings of the 40th
2023
-
[52]
Loop Calculus in Statistical Physics and Information Science , author =. Physical Review E , volume =. doi:10.1103/PhysRevE.73.065102 , urldate =
-
[53]
Advances in Neural Information Processing Systems , volume =
Minigrid & Miniworld:. Advances in Neural Information Processing Systems , volume =
-
[54]
Corenflos, Adrien and Zhao, Zheng and S. Temporal. 2022 25th. doi:10.23919/FUSION49751.2022.9841306 , urldate =
-
[55]
International
Cox, Marco and. International
-
[56]
American journal of physics , volume =
Probability, Frequency and Reasonable Expectation , author =. American journal of physics , volume =
-
[57]
and Ramaker, B
Cutler, Richard R. and Ramaker, B. L. , year = 1979, journal =. Dynamic
1979
-
[58]
Active Inference on Discrete State-Spaces:
Da Costa, Lancelot and Parr, Thomas and Sajid, Noor and Veselic, Sebastijan and Neacsu, Victorita and Friston, Karl , year = 2020, month = dec, journal =. Active Inference on Discrete State-Spaces:. doi:10.1016/j.jmp.2020.102447 , urldate =
-
[59]
Da Costa, Lancelot and Tenka, Samuel and Zhao, Dominic and Sajid, Noor , year = 2024, month = jan, number =. Active. doi:10.48550/arXiv.2401.12917 , urldate =. arXiv , keywords =:2401.12917 , primaryclass =
-
[60]
doi:10.5194/essd-15-317-2023 , urldate =
Earth System Science Data , volume =. doi:10.5194/essd-15-317-2023 , urldate =
-
[61]
IEEE Transactions on Geoscience and Remote Sensing , volume =
Bayesian. IEEE Transactions on Geoscience and Remote Sensing , volume =. doi:10.1109/TGRS.2024.3434443 , urldate =
-
[62]
Differentiable Expected Hypervolume Improvement for Parallel Multi-Objective
Daulton, Samuel and Balandat, Maximilian and Bakshy, Eytan , year = 2020, month = dec, series =. Differentiable Expected Hypervolume Improvement for Parallel Multi-Objective. Proceedings of the 34th
2020
-
[63]
Parallel
Daulton, Samuel and Balandat, Maximilian and Bakshy, Eytan , year = 2021, month = dec, series =. Parallel. Proceedings of the 35th
2021
-
[64]
, year = 2007, month = jun, pages =
Dauwels, J. , year = 2007, month = jun, pages =. On. doi:10.1109/ISIT.2007.4557602 , abstract =
-
[65]
doi:10.1109/MMAR.2012.6347921 , urldate =
Consistent Control Hierarchies with Top Layers Represented by Timed Event Graphs , booktitle =. doi:10.1109/MMAR.2012.6347921 , urldate =
-
[66]
Spatial and. Entropy , volume =. doi:10.3390/e26010083 , urldate =
-
[67]
De Vries, Bert and Nuijten, Wouter and. Expected. doi:10.48550/arXiv.2504.14898 , urldate =. arXiv , keywords =:2504.14898 , primaryclass =
-
[68]
Journal of neural engineering , volume =
The Neural Optimal Control Hierarchy for Motor Control , author =. Journal of neural engineering , volume =
-
[69]
Dillon, Joshua V. and Langmore, Ian and Tran, Dustin and Brevdo, Eugene and Vasudevan, Srinivas and Moore, Dave and Patton, Brian and Alemi, Alex and Hoffman, Matt and Saurous, Rif A. , year = 2017, month = nov, number =. doi:10.48550/arXiv.1711.10604 , urldate =. arXiv , keywords =:1711.10604 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1711.10604 2017
-
[70]
Stochastic
Dritsas, Ioannis , year = 2011, month = feb, publisher =. Stochastic
2011
-
[71]
Drusch, M. and Del Bello, U. and Carlier, S. and Colin, O. and Fernandez, V. and Gascon, F. and Hoersch, B. and Isola, C. and Laberinti, P. and Martimort, P. and Meygret, A. and Spoto, F. and Sy, O. and Marchese, F. and Bargellini, P. , year = 2012, month = may, journal =. Sentinel-2:. doi:10.1016/j.rse.2011.11.026 , urldate =
-
[72]
Duane, Simon and Kennedy, A. D. and Pendleton, Brian J. and Roweth, Duncan , year = 1987, month = sep, journal =. Hybrid. doi:10.1016/0370-2693(87)91197-X , urldate =
-
[73]
Durrande, Nicolas and Adam, Vincent and Bordeaux, Lucas and Eleftheriadis, Stefanos and Hensman, James , year = 2019, month = apr, pages =. Banded. Proceedings of the
2019
-
[74]
Eliasmith, Chris and Stewart, Terrence C. and Choo, Xuan and Bekolay, Trevor and DeWolf, Travis and Tang, Yichuan and Rasmussen, Daniel , year = 2012, month = nov, journal =. A. doi:10.1126/science.1225266 , urldate =
-
[75]
Resolving Uncertainty on the Fly:
Engstr. Resolving Uncertainty on the Fly:. doi:10.48550/arXiv.2311.06417 , urldate =. arXiv , keywords =:2311.06417 , primaryclass =
-
[76]
Scalable Global Optimization via Local
Eriksson, David and Pearce, Michael and Gardner, Jacob R and Turner, Ryan and Poloczek, Matthias , year = 2019, month = dec, number =. Scalable Global Optimization via Local. Proceedings of the 33rd
2019
-
[77]
Esaki, Kanako and Matsumura, Tadayuki and Minusa, Shunsuke and Shao, Yang and Yoshimura, Chihiro and Mizuno, Hiroyuki , editor =. Dynamical. Active. doi:10.1007/978-3-031-47958-8_2 , abstract =
-
[78]
Hierarchical
Findeisen, W. Hierarchical
-
[79]
Annealing in Variational Inference Mitigates Mode Collapse:
Fogliani, Luigi and Loureiro, Bruno and Gabri. Annealing in Variational Inference Mitigates Mode Collapse:. doi:10.48550/arXiv.2602.12923 , urldate =. arXiv , keywords =:2602.12923 , primaryclass =
-
[80]
David , year = 2001, journal =
Forney, G. David , year = 2001, journal =. Codes on Graphs:
2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.