Low-Cost Neuromorphic Fall Detection Using Synthetic Event Data and Hybrid SNNs
Pith reviewed 2026-06-26 21:20 UTC · model grok-4.3
The pith
Hybrid SNN-CNN models detect falls from synthetic event data generated by smartphone videos with efficiency gains and no accuracy loss.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Hybrid architectures that merge spiking layers with convolutional elements, when trained on event streams synthesized from conventional video frames, achieve fall detection performance comparable to standard models while delivering substantial efficiency improvements, validating the use of SNNs and DVS-style data for this task without specialized sensors.
What carries the argument
Hybrid SNNs integrating spiking neural layers with CNN components, trained on synthetic Dynamic Vision Sensor event data converted from smartphone video frames.
If this is right
- Energy consumption drops for fall detection while accuracy holds steady against conventional models.
- Development of neuromorphic applications becomes feasible without access to real event cameras during training.
- The approach extends to other spatio-temporal recognition tasks in resource-limited settings.
- Simulated data pipelines lower barriers to testing SNN viability on complex real-world problems.
Where Pith is reading between the lines
- Direct hardware trials on edge neuromorphic chips would reveal whether simulation-to-reality gaps affect latency or power in deployed systems.
- Combining the hybrid models with additional low-cost sensors could address edge cases like varying lighting or clothing that simulation may under-represent.
- The same conversion method from video to events could support rapid prototyping for other detection tasks such as gesture or activity recognition.
Load-bearing premise
Event data simulated from smartphone videos reproduces the timing statistics and noise properties of real DVS hardware closely enough for models to transfer without performance degradation.
What would settle it
Deploying the trained hybrid models on recordings from physical DVS cameras and measuring whether accuracy or energy metrics deviate substantially from the simulated results.
Figures




read the original abstract
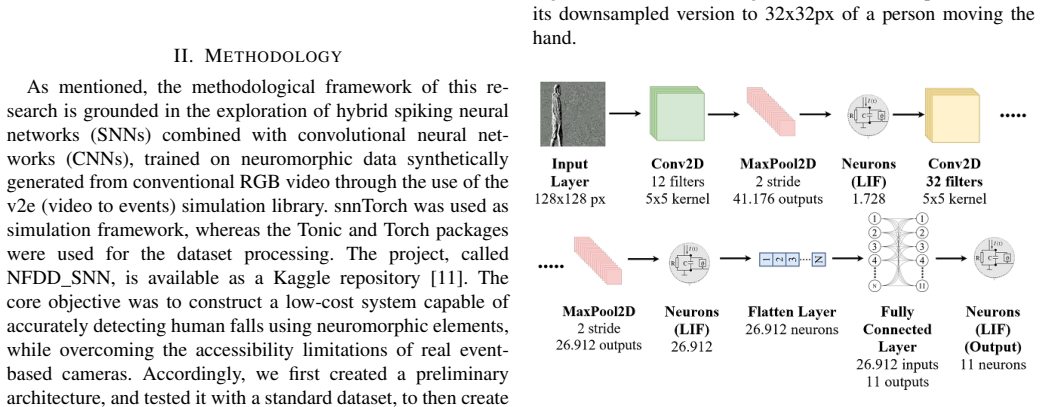
This work presents the development of hybrid models that integrate spiking neural networks (SNNs) with components of convolutional neural networks (CNNs) to learn from simulated event-based camera data (Dynamic Vision Sensor, DVS) generated from conventional smartphone videos. Aimed primarily at human fall detection, the approach leverages the energy efficiency and spatio-temporal processing capabilities of SNNs by converting video frames into event-based data. The proposed models are evaluated through simulations on multiple datasets, comparing their performance to that of traditional machine learning models. Results demonstrate significant gains in efficiency without sacrificing accuracy, underscoring the potential of combining SNNs and DVS technology for complex tasks in real-world environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes the creation of hybrid spiking neural network (SNN) models that incorporate convolutional neural network (CNN) elements for processing synthetic event-based data generated from standard smartphone videos. Focused on fall detection, the models are tested on multiple datasets and compared to conventional machine learning techniques, with claims of improved efficiency at comparable accuracy levels, pointing to the promise of neuromorphic approaches in practical scenarios.
Significance. Should the synthetic event simulation prove representative of actual Dynamic Vision Sensor (DVS) output, the method offers a pathway to develop energy-efficient fall detection systems using readily available video sources rather than specialized cameras. This could accelerate research in neuromorphic computing for healthcare applications. The hybrid model design is a sensible way to handle the sparse, asynchronous nature of event data.
major comments (2)
- [Abstract] Abstract: The statement regarding 'significant gains in efficiency without sacrificing accuracy' provides no supporting quantitative evidence, such as specific accuracy rates, efficiency metrics, dataset descriptions, or baseline comparisons. This omission makes it impossible to verify the central performance claims.
- [Methods] Data simulation approach (methods section): The conversion of RGB video to event data does not incorporate real DVS characteristics including photon noise, latency, and contrast threshold variations. The absence of a direct comparison between synthetic and real DVS recordings on the same fall scenarios undermines the assertion of potential for real-world neuromorphic deployment.
minor comments (1)
- [Abstract] The abstract would be strengthened by the inclusion of at least one key numerical result to substantiate the efficiency and accuracy claims.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point by point below, proposing revisions where they strengthen the manuscript without misrepresenting our work.
read point-by-point responses
-
Referee: [Abstract] Abstract: The statement regarding 'significant gains in efficiency without sacrificing accuracy' provides no supporting quantitative evidence, such as specific accuracy rates, efficiency metrics, dataset descriptions, or baseline comparisons. This omission makes it impossible to verify the central performance claims.
Authors: We agree that the abstract would be strengthened by including quantitative details. In the revised version, we will update the abstract to report specific accuracy rates, efficiency metrics (such as energy or latency comparisons), dataset names, and baseline results drawn from the experiments in the results section. revision: yes
-
Referee: [Methods] Data simulation approach (methods section): The conversion of RGB video to event data does not incorporate real DVS characteristics including photon noise, latency, and contrast threshold variations. The absence of a direct comparison between synthetic and real DVS recordings on the same fall scenarios undermines the assertion of potential for real-world neuromorphic deployment.
Authors: The simulation employs a standard RGB-to-event conversion without additional modeling of photon noise, latency, or variable contrast thresholds, as this is a low-cost synthetic approach. We will revise the methods section to describe the conversion process more explicitly and add a dedicated limitations paragraph in the discussion that qualifies the real-world deployment claims. A direct side-by-side comparison with real DVS recordings on identical scenarios is not possible with the data available in this study. revision: partial
- Direct comparison between the synthetic event data and real DVS recordings on the same fall scenarios
Circularity Check
No circularity: empirical ML evaluation with no derivations or self-referential predictions
full rationale
The paper describes an empirical study training hybrid SNN-CNN models on synthetic event data generated from smartphone videos for fall detection, with performance compared to traditional ML models. No equations, first-principles derivations, fitted parameters presented as predictions, or uniqueness theorems appear in the abstract or described content. Claims rest on simulation results rather than any mathematical chain that reduces to its own inputs by construction. This is a standard supervised learning setup without the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Event-based vision: A survey,
G. Gallego, T. Delbruck, G. Orchard, C. Bartolozzi, B. Taba, A. Censi, S. Leutenegger, A. J. Davison, J. Conradt, K. Daniilidis, and D. Scara- muzza, “Event-based vision: A survey,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 44, no. 1, pp. 154–180, 2020
2020
-
[2]
Ambient assisted living: A review of technologies, methodologies and future perspectives for healthy aging of population,
G. Cicirelli, R. Marani, A. Petitti, A. Milella, and T. D’Orazio, “Ambient assisted living: A review of technologies, methodologies and future perspectives for healthy aging of population,”Sensors, vol. 21, no. 10, p. 3549, 2021
2021
-
[3]
Elderly fall detection systems: A literature survey,
X. Wang, J. Ellul, and G. Azzopardi, “Elderly fall detection systems: A literature survey,”Frontiers in Robotics and AI, vol. 7, p. 71, 2020
2020
-
[4]
Sensor technologies for fall detection systems: A review,
A. Singhet al., “Sensor technologies for fall detection systems: A review,”IEEE Sensors Journal, vol. 20, no. 13, pp. 6889–6919, 2020
2020
-
[5]
Fall detection with event-based data: A case study,
X. Wanget al., “Fall detection with event-based data: A case study,” in International Conference on Computer Analysis of Images and Patterns. Springer Nature Switzerland, 2023
2023
-
[6]
v2e: From video frames to realistic dvs events,
Y . Hu, S.-C. Liu, and T. Delbruck, “v2e: From video frames to realistic dvs events,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021
2021
-
[7]
Hybrid snn-based privacy-preserving fall detection using neuromorphic sensors,
S. S. Prasadet al., “Hybrid snn-based privacy-preserving fall detection using neuromorphic sensors,” inProceedings of the F ourteenth Indian Conference on Computer Vision, Graphics and Image Processing, 2023
2023
-
[8]
Embedded real-time fall detection using deep learning for elderly care,
H. Leeet al., “Embedded real-time fall detection using deep learning for elderly care,”arXiv preprint arXiv:1711.11200, 2017
Pith/arXiv arXiv 2017
-
[9]
Benchmarking conventional vision models on neuromorphic fall detection and action recognition dataset,
K. S. Krishnan and K. S. Krishnan, “Benchmarking conventional vision models on neuromorphic fall detection and action recognition dataset,” in2022 IEEE 12th Annual Computing and Communication Workshop and Conference (CCWC). IEEE, 2022
2022
-
[10]
Care: A dynamic stereo vision sensor system for fall detection,
A. N. Belbachiret al., “Care: A dynamic stereo vision sensor system for fall detection,” in2012 IEEE International Symposium on Circuits and Systems (ISCAS). IEEE, 2012
2012
-
[11]
Nfdd snn kaggle notebook,
G. Rojas, “Nfdd snn kaggle notebook,” 2024, [Online]. Available: https://www.kaggle.com/code/apemangr/nfdd-snn
2024
-
[12]
A low power, fully event-based gesture recognition system,
A. Amiret al., “A low power, fully event-based gesture recognition system,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.