EIT-Pneumatic Hybrid Robotic Skin for Practical and Accurate Force Map Reconstruction
Pith reviewed 2026-06-29 12:00 UTC · model grok-4.3
The pith
Hybrid robotic skin combines EIT with pneumatic calibration to cut sensitivity variation from 0.31 to 0.14.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
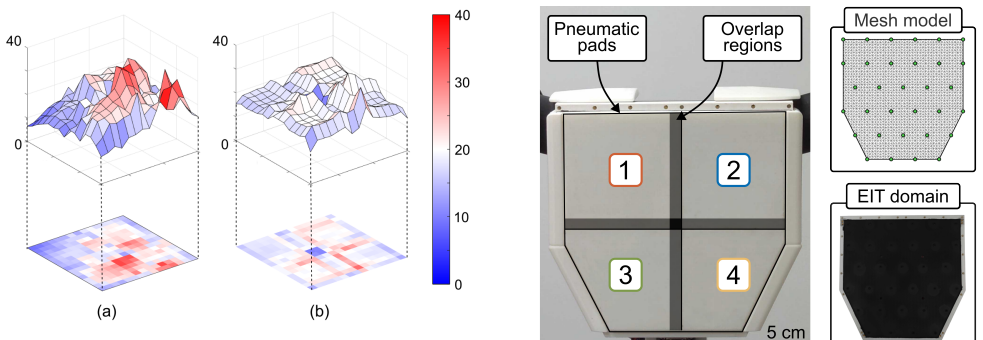
By pairing EIT measurements with per-pad pneumatic calibration, the hybrid skin achieves accurate force map reconstruction across entire pads. This reduces the longstanding sensitivity non-uniformity of EIT, lowering the coefficient of variation from 0.31 to 0.14, while the fabrication method remains simple and scalable.
What carries the argument
Per-pad pneumatic calibration that normalizes the non-uniform sensitivity of EIT-based force reconstruction.
If this is right
- Force reconstruction is consistent across different contact locations on the same pad.
- Sensitivity non-uniformity is reduced compared to EIT-only methods.
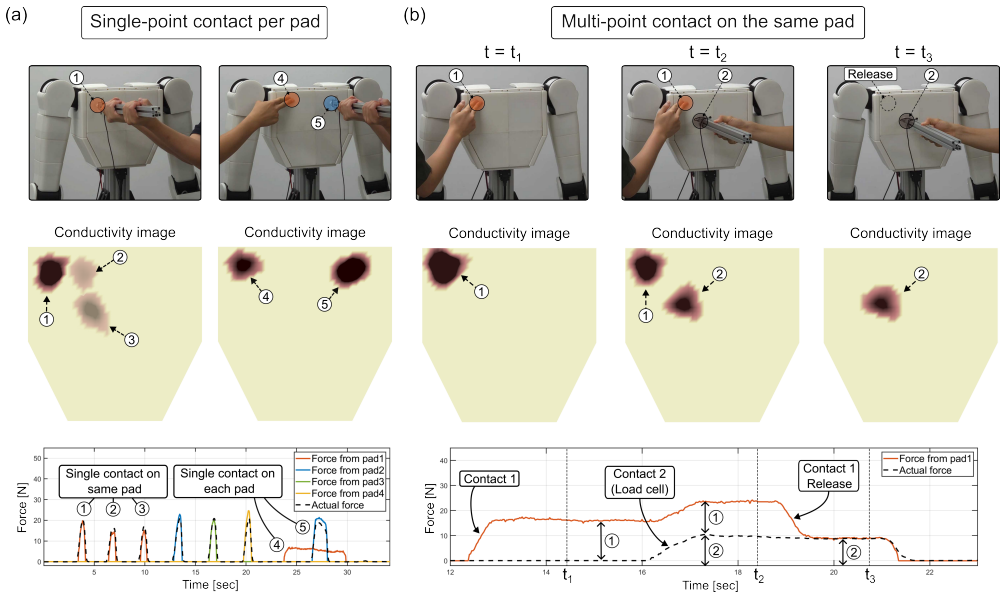
- Pneumatic signals remain reliable for diverse contact scenarios including simultaneous multiple contacts.
- The approach supports integration into real robotic systems for whole-body tactile sensing.
Where Pith is reading between the lines
- Calibration per pad could extend EIT sensing to more complex contact patterns without redesign.
- Full-body application on robots might enhance safe physical interaction with humans.
- Similar calibration strategies may improve other tomographic sensing methods in robotics.
Load-bearing premise
Pneumatic calibration per pad stays accurate and stable for diverse contact scenarios including multiple simultaneous contacts on the same sensing pad.
What would settle it
A test where force reconstruction becomes inconsistent under multiple simultaneous contacts on one pad would show the calibration does not hold.
Figures

read the original abstract
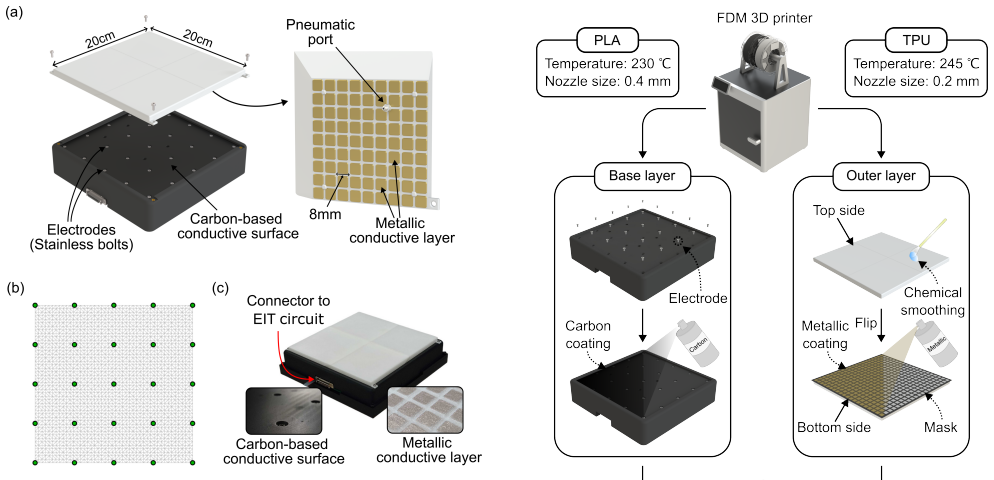
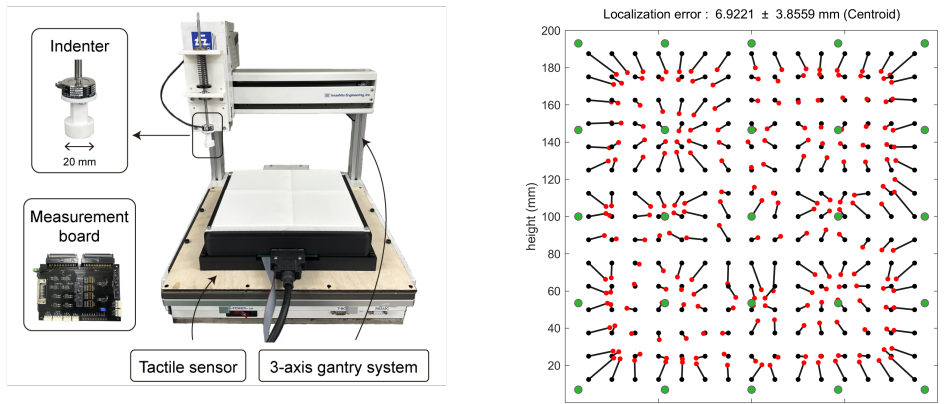
We present a hybrid robotic skin that combines electrical impedance tomography (EIT) with pneumatic tactile sensing to improve force reconstruction capability. The developed robotic skin is fabricated entirely by 3D printing and spray coating, making it affordable and easy to build. A Tikhonov-regularized inverse reconstruction, paired with per-pad pneumatic calibration, enables accurate large-area tactile sensing with a simple measurement scheme. For validation, we conducted load-cell indentation experiments; the results showed consistent force reconstruction across locations within a pad. Compared with an EIT-only baseline, sensitivity non-uniformity was also reduced, with the coefficient of variation decreasing from 0.31 to 0.14, indicating that the proposed approach addresses a longstanding limitation of EIT. We further demonstrated chest-mounted integration on a humanoid robot and found that the pneumatic signals remained reliable across diverse contact scenarios, including multiple simultaneous contacts on the same sensing pad. These results indicate a practical path toward accurate, scalable whole-body tactile sensing in real robotic systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a hybrid robotic skin combining electrical impedance tomography (EIT) with pneumatic tactile sensing, fabricated entirely by 3D printing and spray coating. It employs Tikhonov-regularized inverse reconstruction paired with per-pad pneumatic calibration to achieve accurate large-area force mapping. Load-cell indentation experiments are reported to show consistent force reconstruction within pads and a reduction in sensitivity non-uniformity (coefficient of variation from 0.31 to 0.14 versus an EIT-only baseline). Integration on a chest-mounted humanoid robot is used to demonstrate reliability of pneumatic signals under diverse contacts, including multiple simultaneous contacts on the same pad.
Significance. If the reported CV reduction holds under rigorous validation, the hybrid approach would address a known limitation of EIT-based tactile skins by improving spatial uniformity without complex electrode arrays, while retaining the advantages of simple fabrication and measurement. The emphasis on affordability and robot integration points to practical utility for whole-body sensing, though the current evidence base is too thin to assess whether the improvement generalizes beyond the tested scenarios.
major comments (2)
- [Abstract] Abstract: The headline result (CV reduction from 0.31 to 0.14) is attributed to the hybrid method via per-pad pneumatic calibration, yet the load-cell indentation protocol is described only as yielding 'consistent force reconstruction across locations within a pad' with no explicit statement that multi-contact stability of the calibration was verified in those trials; the multi-contact demonstration is confined to the separate robot-integration experiments. This disconnect leaves the causal link between the hybrid calibration and the reported non-uniformity reduction unsupported.
- [Abstract] Abstract: No equations, regularization-parameter values, error bars, number of indentation trials, or exclusion criteria are supplied for the load-cell experiments that produced the CV figures, nor is the EIT-only baseline reconstruction procedure detailed. Without these, the quantitative improvement cannot be evaluated or reproduced.
minor comments (1)
- The Tikhonov regularization parameter is listed as a free parameter; a sensitivity analysis or selection criterion should be added to clarify its influence on the reported results.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below and propose revisions where they improve clarity without altering the reported findings.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline result (CV reduction from 0.31 to 0.14) is attributed to the hybrid method via per-pad pneumatic calibration, yet the load-cell indentation protocol is described only as yielding 'consistent force reconstruction across locations within a pad' with no explicit statement that multi-contact stability of the calibration was verified in those trials; the multi-contact demonstration is confined to the separate robot-integration experiments. This disconnect leaves the causal link between the hybrid calibration and the reported non-uniformity reduction unsupported.
Authors: The load-cell indentation experiments used single-point contacts at multiple locations within each pad to measure spatial sensitivity variation. The per-pad pneumatic calibration was applied directly to the EIT reconstructions from these single-contact trials, producing the reported CV reduction. The robot-integration experiments separately demonstrate pneumatic signal reliability under multi-contact conditions. We agree the abstract should explicitly distinguish the single-contact load-cell protocol (used for the CV metric) from the multi-contact robot demonstration and will revise the abstract accordingly to strengthen the presentation of the causal link. revision: partial
-
Referee: [Abstract] Abstract: No equations, regularization-parameter values, error bars, number of indentation trials, or exclusion criteria are supplied for the load-cell experiments that produced the CV figures, nor is the EIT-only baseline reconstruction procedure detailed. Without these, the quantitative improvement cannot be evaluated or reproduced.
Authors: The full manuscript details the Tikhonov regularization (including parameter selection) in the Methods section, reports the number of indentation trials, error bars, and exclusion criteria in the Results section for the load-cell experiments, and describes the EIT-only baseline as identical reconstruction without pneumatic calibration. To improve abstract self-containment, we will add a concise statement of these key parameters and the baseline procedure in the revised abstract. revision: yes
Circularity Check
No significant circularity; empirical results are independent of inputs
full rationale
The paper reports an empirical comparison of force reconstruction accuracy between a hybrid EIT-pneumatic method and an EIT-only baseline, using load-cell indentation data to measure coefficient of variation (0.31 to 0.14). No equations, fitted parameters, or predictions are described that reduce by construction to the per-pad calibration data or any other input. The Tikhonov reconstruction is presented as a standard technique paired with calibration, but the non-uniformity reduction is shown as an experimental outcome rather than a definitional or fitted tautology. No self-citation load-bearing steps, uniqueness theorems, or ansatz smuggling appear in the provided text. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- Tikhonov regularization parameter
Reference graph
Works this paper leans on
-
[1]
Safe physical human-robot interaction: Measurements, analysis and new insights,
S. Haddadin, A. Albu-Sch ¨affer, and G. Hirzinger, “Safe physical human-robot interaction: Measurements, analysis and new insights,” inRobotics Research, M. Kaneko and Y . Nakamura, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2011, pp. 395–407
2011
-
[2]
Designing optimally safe robot surface properties for minimizing the stress characteristics of human-robot collisions,
J.-J. Park, S. Haddadin, J.-B. Song, and A. Albu-Sch ¨affer, “Designing optimally safe robot surface properties for minimizing the stress characteristics of human-robot collisions,” in2011 IEEE International Conference on Robotics and Automation, 2011, pp. 5413–5420
2011
-
[3]
Effect of active and passive protective soft skins on collision forces in human–robot collaboration,
P. Svarny, J. Rozlivek, L. Rustler, M. Sramek, ¨Ozg¨ur Deli, M. Zillich, and M. Hoffmann, “Effect of active and passive protective soft skins on collision forces in human–robot collaboration,”Robotics and Computer-Integrated Manufacturing, vol. 78, p. 102363, 2022
2022
-
[4]
Electrical impedance tomography for artificial sensitive robotic skin: A review,
D. Silvera-Tawil, D. Rye, M. Soleimani, and M. Velonaki, “Electrical impedance tomography for artificial sensitive robotic skin: A review,” IEEE Sensors Journal, vol. 15, no. 4, pp. 2001–2016, 2015
2001
-
[5]
Artificial sensitive skin for robotics based on electrical impedance tomography,
K. Liu, Y . Wu, S. Wang, H. Wang, H. Chen, B. Chen, and J. Yao, “Artificial sensitive skin for robotics based on electrical impedance tomography,”Advanced Intelligent Systems, vol. 2, no. 4, p. 1900161, 2020
2020
-
[6]
Recent developments in impedance- based tactile sensors: A review,
Z. Cui, Y . Yu, and H. Wang, “Recent developments in impedance- based tactile sensors: A review,”IEEE Sensors Journal, vol. 24, no. 3, pp. 2350–2366, 2023
2023
-
[7]
Variable sensitivity multimaterial robotic e-skin com- bining electronic and ionic conductivity using electrical impedance tomography,
A. Costa Cornell `a, D. Hardman, L. Costi, J. Brancart, G. Van Assche, and F. Iida, “Variable sensitivity multimaterial robotic e-skin com- bining electronic and ionic conductivity using electrical impedance tomography,”Scientific Reports, vol. 13, no. 1, p. 20004, 2023
2023
-
[8]
A novel physical human–robot interface with pressure distribution measurement based on electrical impedance tomography,
H. Chen, K. Langlois, J. Brancart, E. Roels, T. Verstraten, and B. Van- derborght, “A novel physical human–robot interface with pressure distribution measurement based on electrical impedance tomography,” IEEE Sensors Journal, vol. 23, no. 18, pp. 21 914–21 923, 2023
2023
-
[9]
Tikhonov regularization and prior information in electrical impedance tomography,
M. Vauhkonen, D. Vadasz, P. Karjalainen, E. Somersalo, and J. Kaipio, “Tikhonov regularization and prior information in electrical impedance tomography,”IEEE Transactions on Medical Imaging, vol. 17, no. 2, pp. 285–293, 1998
1998
-
[10]
In vivo impedance imaging with total variation regularization,
A. Borsic, B. M. Graham, A. Adler, and W. R. B. Lionheart, “In vivo impedance imaging with total variation regularization,”IEEE Transactions on Medical Imaging, vol. 29, no. 1, pp. 44–54, 2010
2010
-
[11]
Image reconstruction in electrical impedance tomography based on structure-aware sparse bayesian learning,
S. Liu, J. Jia, Y . D. Zhang, and Y . Yang, “Image reconstruction in electrical impedance tomography based on structure-aware sparse bayesian learning,”IEEE Transactions on Medical Imaging, vol. 37, no. 9, pp. 2090–2102, 2018
2090
-
[12]
A novel deep neural network method for electrical impedance tomography,
X. Li, Y . Zhou, J. Wang, Q. Wang, Y . Lu, X. Duan, Y . Sun, J. Zhang, and Z. Liu, “A novel deep neural network method for electrical impedance tomography,”Transactions of the Institute of Measurement and Control, vol. 41, no. 14, pp. 4035–4049, 2019
2019
-
[13]
Deep neural network based electrical impedance tomographic sensing methodology for large-area robotic tactile sensing,
H. Park, K. Park, S. Mo, and J. Kim, “Deep neural network based electrical impedance tomographic sensing methodology for large-area robotic tactile sensing,”IEEE Transactions on Robotics, vol. 37, no. 5, pp. 1570–1583, 2021
2021
-
[14]
Improved image reconstruction for an eit-based sensitive skin with multiple internal electrodes,
D. S. Tawil, D. Rye, and M. Velonaki, “Improved image reconstruction for an eit-based sensitive skin with multiple internal electrodes,”IEEE Transactions on Robotics, vol. 27, no. 3, pp. 425–435, 2011
2011
-
[15]
A deformable and deformation sensitive tactile distribution sensor,
A. Nagakubo, H. Alirezaei, and Y . Kuniyoshi, “A deformable and deformation sensitive tactile distribution sensor,” in2007 IEEE Inter- national Conference on Robotics and Biomimetics (ROBIO), 2007, pp. 1301–1308
2007
-
[16]
Extremely durable electrical impedance tomography–based soft and ultrathin wearable e-skin for three-dimensional tactile interfaces,
K. Kim, J.-H. Hong, K. Bae, K. Lee, D. J. Lee, J. Park, H. Zhang, M. Sang, J. E. Ju, Y . U. Cho, K. Kang, W. Park, S. Jung, J. W. Lee, B. Xu, J. Kim, and K. J. Yu, “Extremely durable electrical impedance tomography–based soft and ultrathin wearable e-skin for three-dimensional tactile interfaces,”Science Advances, vol. 10, no. 38, p. eadr1099, 2024
2024
-
[17]
Image reconstruction for electrical impedance tomography: Experimental comparison of radial basis neural network and gauss – newton method,
R. Hrabuska, M. Prauzek, M. Venclikova, and J. Konecny, “Image reconstruction for electrical impedance tomography: Experimental comparison of radial basis neural network and gauss – newton method,”IFAC-PapersOnLine, vol. 51, no. 6, pp. 438–443, 2018, 15th IFAC Conference on Programmable Devices and Embedded Systems PDeS 2018
2018
-
[18]
Artificial skin through super- sensing method and electrical impedance data from conductive fabric with aid of deep learning,
X. Duan, S. Taurand, and M. Soleimani, “Artificial skin through super- sensing method and electrical impedance data from conductive fabric with aid of deep learning,”Scientific reports, vol. 9, no. 1, p. 8831, 2019
2019
-
[19]
An ert-based robotic skin with sparsely distributed electrodes: Structure, fabrication, and dnn-based signal processing,
K. Park, H. Park, H. Lee, S. Park, and J. Kim, “An ert-based robotic skin with sparsely distributed electrodes: Structure, fabrication, and dnn-based signal processing,” in2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 1617–1624
2020
-
[20]
3d printed soft skin for safe human-robot interaction,
J. Kim, A. Alspach, and K. Yamane, “3d printed soft skin for safe human-robot interaction,” in2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015, pp. 2419–2425
2015
-
[21]
Punyo-1: Soft tactile-sensing upper-body robot for large object manipulation and physical human interaction,
A. Goncalves, N. Kuppuswamy, A. Beaulieu, A. Uttamchandani, K. M. Tsui, and A. Alspach, “Punyo-1: Soft tactile-sensing upper-body robot for large object manipulation and physical human interaction,” in2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), 2022, pp. 844–851
2022
-
[22]
Adaptive electronic skin sensitivity for safe human-robot interaction,
L. Rustler, M. Misar, and M. Hoffmann, “Adaptive electronic skin sensitivity for safe human-robot interaction,” in2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids), 2024, pp. 475–482
2024
-
[23]
Low-cost and easy-to-build soft robotic skin for safe and contact-rich human–robot collaboration,
K. Park, K. Shin, S. Yamsani, K. Gim, and J. Kim, “Low-cost and easy-to-build soft robotic skin for safe and contact-rich human–robot collaboration,”IEEE Transactions on Robotics, vol. 40, pp. 2327– 2338, 2024
2024
-
[24]
A biomimetic elastomeric robot skin using electrical impedance and acoustic to- mography for tactile sensing,
K. Park, H. Yuk, M. Yang, J. Cho, H. Lee, and J. Kim, “A biomimetic elastomeric robot skin using electrical impedance and acoustic to- mography for tactile sensing,”Science Robotics, vol. 7, no. 67, p. eabm7187, 2022
2022
-
[25]
Fully 3d printable robot hand and soft tactile sensor based on air-pressure and capacitive prox- imity sensing,
S. Taylor, K. Park, S. Yamsani, and J. Kim, “Fully 3d printable robot hand and soft tactile sensor based on air-pressure and capacitive prox- imity sensing,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 18 100–18 105
2024
-
[26]
A body-scale robotic skin using distributed multimodal sensing modules: Design, evaluation, and application,
M. J. Yang, H. Chung, Y . Kim, K. Park, and J. Kim, “A body-scale robotic skin using distributed multimodal sensing modules: Design, evaluation, and application,”IEEE Transactions on Robotics, vol. 41, pp. 96–109, 2025
2025
-
[27]
Large-area tomographic tactile skin with air pressure sensing for improved force estimation,
H. Chen, B. Himmel, J. Kubik, M. Hoffmann, and H. Lee, “Large-area tomographic tactile skin with air pressure sensing for improved force estimation,”arXiv preprint arXiv:2503.13036, 2025
-
[28]
Uses and abuses of eidors: an extensible software base for eit,
A. Adler and W. R. B. Lionheart, “Uses and abuses of eidors: an extensible software base for eit,”Physiological Measurement, vol. 27, no. 5, p. S25, apr 2006. [Online]. Available: https://dx.doi.org/10.1088/0967-3334/27/5/S03
-
[29]
A large-area robotic skin for intelligent tactile interaction of collaborative robots,
W. Zheng, D. Guo, W. Yang, and H. Liu, “A large-area robotic skin for intelligent tactile interaction of collaborative robots,”IEEE/ASME Transactions on Mechatronics, pp. 1–11, 2025
2025
-
[30]
Learning-enhanced electronic skin for tactile sensing on deformable surface based on electrical impedance tomography,
H. Dong, X. Wu, D. Hu, Z. Liu, F. Giorgio-Serchi, and Y . Yang, “Learning-enhanced electronic skin for tactile sensing on deformable surface based on electrical impedance tomography,”IEEE Transac- tions on Instrumentation and Measurement, vol. 74, pp. 1–9, 2025
2025
-
[31]
Cali- brating a soft ert-based tactile sensor with a multiphysics model and sim-to-real transfer learning,
H. Lee, H. Park, G. Serhat, H. Sun, and K. J. Kuchenbecker, “Cali- brating a soft ert-based tactile sensor with a multiphysics model and sim-to-real transfer learning,” in2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 1632–1638
2020
-
[32]
Adaptive opti- mal measurement algorithm for ert-based large-area tactile sensors,
K. Park, H. Lee, K. J. Kuchenbecker, and J. Kim, “Adaptive opti- mal measurement algorithm for ert-based large-area tactile sensors,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 1, pp. 304– 314, 2021
2021
-
[33]
Neural-gas network-based optimal design method for ert-based whole-body robotic skin,
K. Park and J. Kim, “Neural-gas network-based optimal design method for ert-based whole-body robotic skin,”IEEE Transactions on Robotics, vol. 38, no. 6, pp. 3463–3478, 2022
2022
-
[34]
Predicting the force map of an ert-based tactile sensor using simulation and deep networks,
H. Lee, H. Sun, H. Park, G. Serhat, B. Javot, G. Martius, and K. J. Kuchenbecker, “Predicting the force map of an ert-based tactile sensor using simulation and deep networks,”IEEE Transactions on Automation Science and Engineering, vol. 20, no. 1, pp. 425–439, 2022
2022
-
[35]
Location-dependent performance of large-area piezoresistive tactile sensors based on electrical impedance tomogra- phy,
Y . Chen and H. Liu, “Location-dependent performance of large-area piezoresistive tactile sensors based on electrical impedance tomogra- phy,”IEEE Sensors Journal, vol. 21, no. 19, pp. 21 622–21 630, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.