Threading Optimization for Vision-Language-Action Model Inference in Low-Cost Smart Agricultural Manipulation
Pith reviewed 2026-06-28 17:32 UTC · model grok-4.3
The pith
Custom threading for RTAC reduces latency and improves stability in VLA control on low-cost agricultural robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
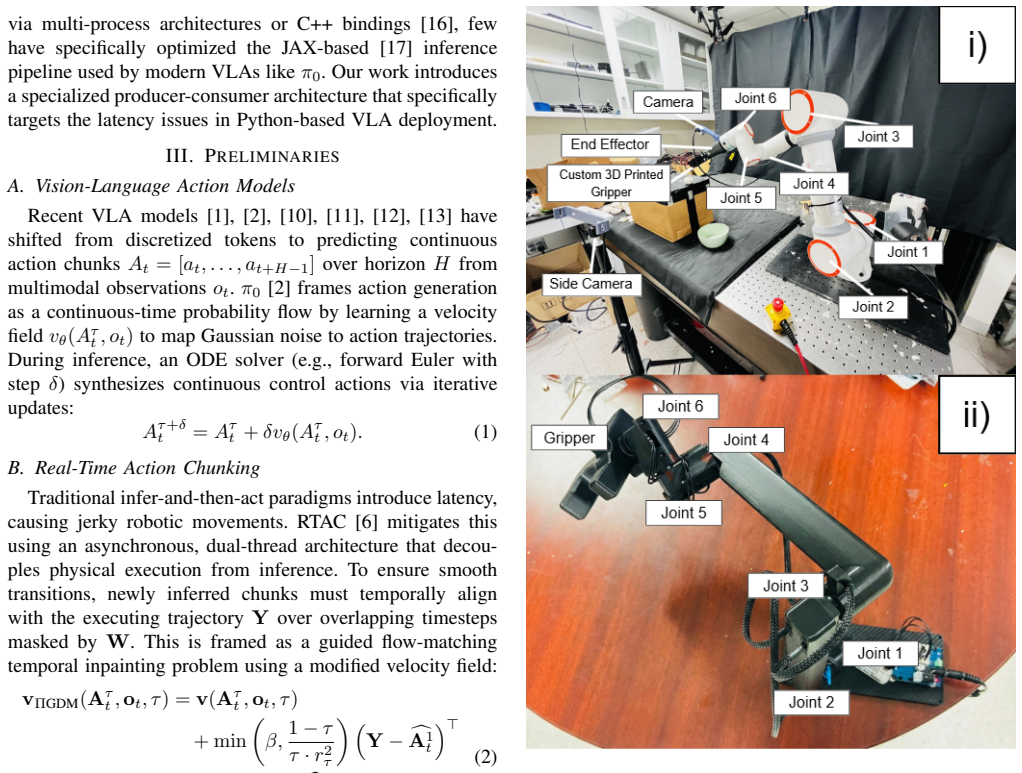
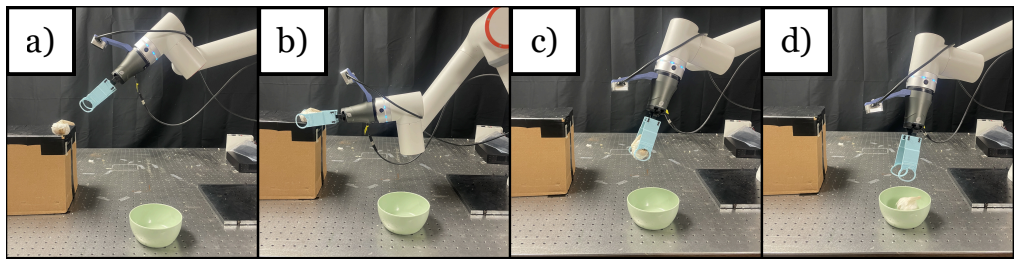
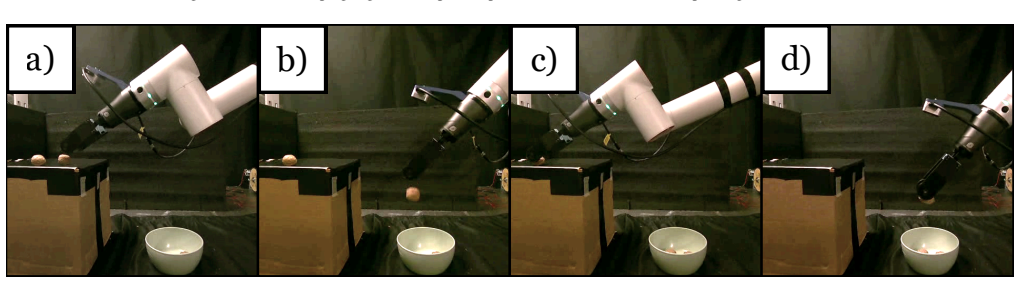
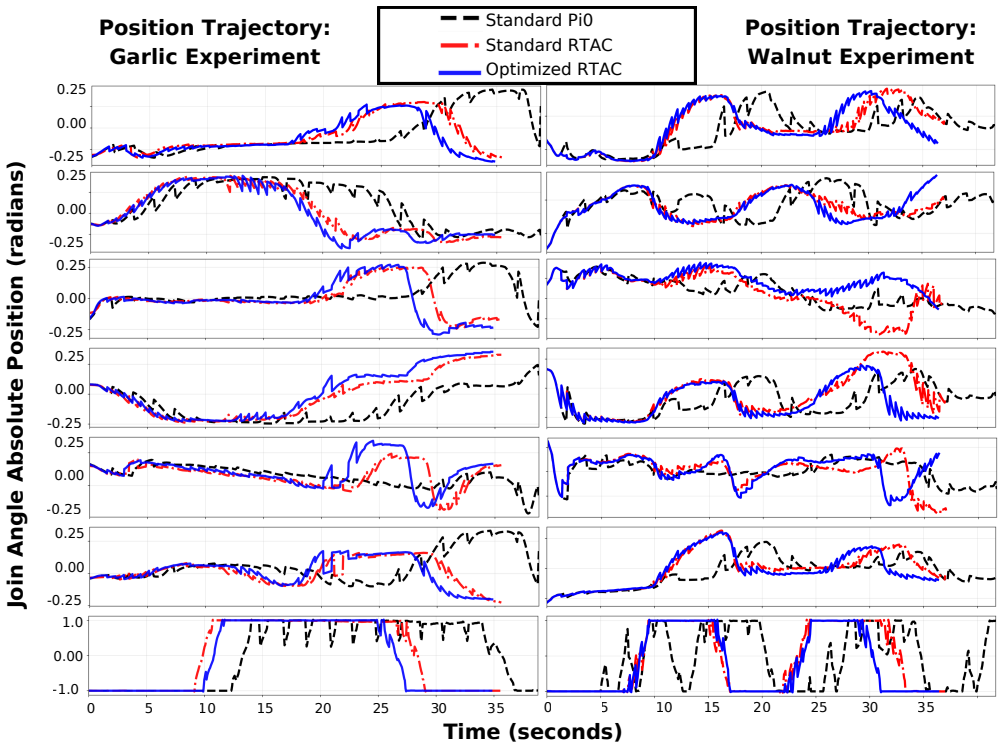
A complete implementation of RTAC on a low-cost robotic arm, with optimized threading in the policy inference and control pipeline, reduces end-to-end latency and improves responsiveness without modifying the underlying policy, resulting in significantly better control stability and speed on tasks involving manipulation of agricultural produce such as garlic bulbs and walnuts.
What carries the argument
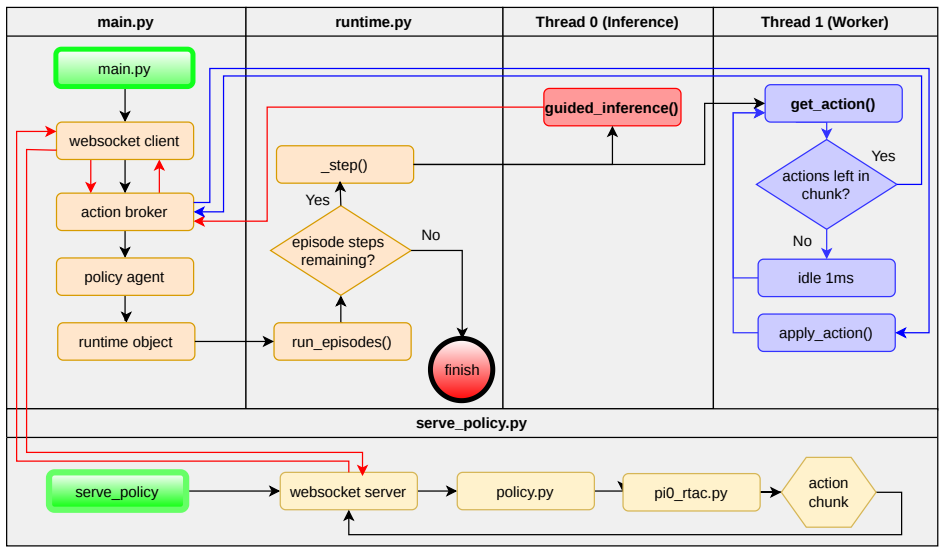
The custom threading implementation for the policy inference and control pipeline.
If this is right
- End-to-end latency drops in the VLA inference and control loop.
- Responsiveness increases for fine-grained adjustments without altering the policy.
- Control stability improves on low-cost hardware for produce manipulation.
- The approach bridges pseudocode to a deployable system on affordable arms.
Where Pith is reading between the lines
- The threading pattern might transfer to other VLA applications on similar hardware.
- Further tuning of the same pipeline could support additional crop types or multi-object scenes.
- The method leaves open whether comparable gains appear when the base RTAC runs on higher-cost platforms.
Load-bearing premise
The base RTAC implementation provides a stable and representative baseline, and the garlic and walnut tasks sufficiently represent the fine-grained motion challenges in broader agricultural manipulation.
What would settle it
A side-by-side measurement of latency, stability, and speed metrics on the garlic and walnut tasks using the custom threading versus the base RTAC implementation would confirm or refute the claimed improvements.
Figures

read the original abstract
Vision-Language Action (VLA) models continue to face challenges such as slow inference speed and difficulty performing fine-grained motion adjustments, limiting their widespread adoption in industry. While the Real-Time Action Chunking (RTAC) algorithm has been proposed to address these bottlenecks, bridging the gap between the algorithm provided in pseudocode to a stable, real-world deployment on a low-cost robotic arm remains a challenge. In this work, we present a complete system-level implementation of RTAC tailored for a low-cost robotic manipulation system. We advance beyond the original high-level pseudocode by optimizing the threading implementation for the policy inference and control pipeline, reducing end-to-end latency and improving responsiveness without modifying the underlying policy. We evaluate this system on tasks involving the manipulation of agricultural produce, specifically garlic bulbs and walnuts. Experimental results demonstrate that our custom threading implementation significantly improves control stability and speed compared to the base implementation of RTAC.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a complete system-level implementation of the Real-Time Action Chunking (RTAC) algorithm for Vision-Language-Action models on a low-cost robotic arm, with a focus on threading optimizations in the policy inference and control pipeline for agricultural manipulation tasks (garlic bulbs and walnuts). It claims that these threading changes reduce end-to-end latency and improve responsiveness without altering the underlying policy, yielding significantly better control stability and speed than the base RTAC implementation.
Significance. If the baseline comparison is properly controlled and quantitative results are supplied, the work would offer a concrete, reproducible example of moving RTAC from pseudocode to stable low-cost hardware deployment, which could aid practical adoption of VLA models in agricultural robotics by addressing inference speed and fine-grained motion issues.
major comments (2)
- [Abstract] Abstract: the claim that 'experimental results demonstrate that our custom threading implementation significantly improves control stability and speed' is unsupported by any metrics, error bars, statistical tests, or implementation details, so the central empirical claim cannot be evaluated.
- The headline result rests on comparison to an unspecified 'base implementation of RTAC.' The manuscript provides no description of how this baseline was constructed (e.g., faithful translation of the original pseudocode, identical hardware and policy weights, or differences in buffering/scheduling/error handling), preventing attribution of any gains specifically to the threading changes.
minor comments (1)
- The choice of garlic/walnut tasks is presented as representative of fine-grained agricultural manipulation, but the manuscript would benefit from explicit justification of why these tasks suffice or from additional test cases.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify areas where additional quantitative details and implementation clarifications are needed to support the central claims. We will revise the manuscript to address these points directly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'experimental results demonstrate that our custom threading implementation significantly improves control stability and speed' is unsupported by any metrics, error bars, statistical tests, or implementation details, so the central empirical claim cannot be evaluated.
Authors: We agree that the abstract claim requires supporting quantitative evidence for proper evaluation. The revised manuscript will include specific metrics (e.g., end-to-end latency in ms, stability scores), error bars, statistical tests, and cross-references to implementation details in the methods and results sections. revision: yes
-
Referee: The headline result rests on comparison to an unspecified 'base implementation of RTAC.' The manuscript provides no description of how this baseline was constructed (e.g., faithful translation of the original pseudocode, identical hardware and policy weights, or differences in buffering/scheduling/error handling), preventing attribution of any gains specifically to the threading changes.
Authors: We agree that a clear specification of the baseline is essential. The revised manuscript will add a dedicated paragraph describing the base RTAC implementation as a direct, faithful translation of the original pseudocode using identical hardware, policy weights, and standard (non-optimized) buffering/scheduling/error handling, enabling attribution of improvements to the threading optimizations. revision: yes
Circularity Check
No circularity: empirical implementation comparison with no derivations or self-referential fits
full rationale
The paper describes a system-level threading implementation of the RTAC algorithm for VLA models on low-cost hardware, evaluated on garlic and walnut manipulation tasks. It claims improved stability and speed versus a 'base implementation of RTAC' but contains no equations, fitted parameters, predictions derived from inputs, uniqueness theorems, or ansatzes. The central claim is an empirical delta from an engineering comparison; no step reduces by construction to its own inputs or to a self-citation chain. The work is self-contained as an implementation report against a stated baseline.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[2]
π 0: A vision- language-action flow model for general robot control,
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichteret al., “π 0: A vision- language-action flow model for general robot control,”arXiv preprint arXiv:2410.24164, 2024
Pith/arXiv arXiv 2024
-
[3]
Claw: A vision-language- action framework for weight-aware robotic grasping,
Z. An, R. Yang, Y . Feng, and L. Zhou, “Claw: A vision-language- action framework for weight-aware robotic grasping,”arXiv preprint arXiv:2509.14143, 2025
Pith/arXiv arXiv 2025
-
[4]
R. Yang, Z. An, L. Zhou, and Y . Feng, “Seqvla: Sequential task ex- ecution for long-horizon manipulation with completion-aware vision- language-action model,”arXiv preprint arXiv:2509.14138, 2025
arXiv 2025
-
[5]
A survey on efficient vision-language-action models,
Z. Yu, B. Wang, P. Zeng, H. Zhang, J. Zhang, L. Gao, J. Song, N. Sebe, and H. T. Shen, “A survey on efficient vision-language-action models,” arXiv preprint arXiv:2510.24795, 2025
arXiv 2025
-
[6]
Real-time execution of action chunking flow policies,
K. Black, M. Y . Galliker, and S. Levine, “Real-time execution of action chunking flow policies,”arXiv preprint arXiv:2506.07339, 2025
Pith/arXiv arXiv 2025
-
[7]
Gello: A general, low- cost, and intuitive teleoperation framework for robot manipulators,
P. Wu, Y . Shentu, Z. Yi, X. Lin, and P. Abbeel, “Gello: A general, low- cost, and intuitive teleoperation framework for robot manipulators,” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 12 156–12 163
2024
-
[8]
Feasibility study for a python-based embedded real-time control system,
e. a. Lim, “Feasibility study for a python-based embedded real-time control system,”Electronics, vol. 12, no. 6, p. 1426, 2023
2023
-
[9]
Rt-2: Vision- language-action models transfer web knowledge to robotic control,
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, X. Chen, K. Choro- manski, T. Ding, D. Driess, A. Dubey, C. Finnet al., “Rt-2: Vision- language-action models transfer web knowledge to robotic control,” inConference on Robot Learning. PMLR, 2023, pp. 328–343
2023
-
[10]
Palm-e: An embodied multimodal language model,
D. Driess, F. Xia, M. S. Sajjadi, C. Lynch, A. Chowdhery, B. Ichter, A. Ayza, J. Bannon, A. Brohan, S. Brownet al., “Palm-e: An embodied multimodal language model,” inInternational Conference on Machine Learning. PMLR, 2023, pp. 8469–8488
2023
-
[11]
π0.5: A vision-language-action model with open-world generalization,
Physical Intelligenceet al., “π0.5: A vision-language-action model with open-world generalization,”arXiv preprint arXiv:2504.16054, April 2025
Pith/arXiv arXiv 2025
-
[12]
π0.6 model card,
Physical Intelligence, “π0.6 model card,” Physical Intelligence, Tech- nical Report, November 2025
2025
-
[13]
π*0.6: A vla that learns from experience,
A. Aminet al., “π*0.6: A vla that learns from experience,”Physical Intelligence, November 2025
2025
-
[14]
Learning fine-grained bimanual manipulation with low-cost hardware,
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine-grained bimanual manipulation with low-cost hardware,”arXiv preprint arXiv:2406.09246, 2023
Pith/arXiv arXiv 2023
-
[15]
Robotics: Modeling, planning, and control (siciliano, b. et al; 2009) [on the shelf],
P. Sanz, “Robotics: Modeling, planning, and control (siciliano, b. et al; 2009) [on the shelf],”Robotics & Automation Magazine, IEEE, vol. 16, pp. 101–101, 12 2009
2009
-
[16]
Pyrobot: An open-source robotics framework for research and benchmarking,
A. Murali, T. Chen, K. V . Alwala, D. Gandhi, L. Pinto, S. Gupta, and A. Gupta, “Pyrobot: An open-source robotics framework for research and benchmarking,”arXiv preprint arXiv:1906.08236, 2019. [Online]. Available: https://arxiv.org/abs/1906.08236
Pith/arXiv arXiv 1906
-
[17]
Compiling machine learning programs via high-level tracing,
L. C. Frostig R., Johnson M. J., “Compiling machine learning programs via high-level tracing,”SysML conference 2018, March 2018
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.