Terrestrial Soft Mobile Robots: A Review
Pith reviewed 2026-05-21 02:15 UTC · model grok-4.3
The pith
A review of soft mobile robots maps terrestrial locomotion without wheels and flags key barriers to adoption.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
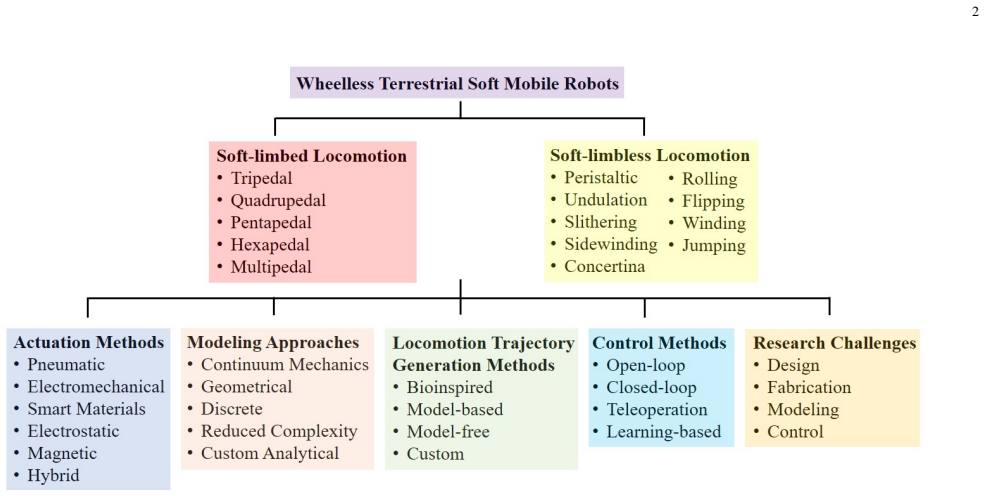
The paper establishes that wheelless terrestrial soft mobile robots have progressed through diverse locomotion strategies, actuation approaches, modeling methods, and control architectures, yet persistent challenges in areas such as robustness, energy use, and scalability must be resolved before widespread practical deployment becomes feasible.
What carries the argument
The central organizing mechanism is the division of the field into locomotion strategies, actuation methods, modeling approaches, and control systems, which the review uses to catalog developments and surface open problems.
If this is right
- Addressing the listed challenges would allow soft robots to operate reliably in unstructured outdoor environments for search-and-rescue tasks.
- Better actuation and control methods would expand use in service and surveillance roles where gentle interaction with surroundings matters.
- Improved modeling would speed up the design cycle for soft robots intended for manufacturing or exploration settings.
- Resolving these issues could accelerate transition from laboratory prototypes to field-ready systems.
Where Pith is reading between the lines
- The review's structure could guide experiments that directly compare locomotion strategies under identical terrain conditions to quantify trade-offs.
- Connections between the highlighted challenges and emerging soft-material fabrication techniques remain open for future targeted studies.
- The catalog of control approaches might inform hybrid systems that combine soft bodies with minimal rigid components for added precision.
Load-bearing premise
The review assumes that the papers it selected represent the full current state of the field and that the challenges it highlights are the most important ones blocking adoption.
What would settle it
A later survey that incorporates a substantial set of omitted papers or demonstrates that different unlisted challenges are more decisive would undermine the review's claim to comprehensive coverage.
Figures






read the original abstract
Soft mobile robots have emerged as a promising area of research with potential applications in various disciplines including but not limited to search-and-rescue, service, surveillance, explorations, and manufacturing. In this article, we provide a comprehensive review of the current state of soft mobile robot research, focusing on wheelless terrestrial locomotive systems. We include past and present developments in locomotion strategies, actuation methods, modeling approaches, and control systems. Further, we identify key research challenges that must be overcome to enable the widespread adoption of soft mobile robots in various applications. Overall, this article provides a valuable resource for researchers and practitioners interested in the field of soft mobile robots and soft robotics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This review article surveys past and present developments in terrestrial soft mobile robots with a focus on wheelless locomotion. It organizes the literature around locomotion strategies, actuation methods, modeling approaches, and control systems, and concludes by identifying key research challenges that must be addressed for broader adoption in applications such as search-and-rescue and exploration.
Significance. A well-structured review that accurately synthesizes the cited works could provide a useful entry point for researchers entering the soft robotics field and help consolidate knowledge on locomotion and actuation trade-offs. The manuscript's value hinges on whether the selected body of work is representative; the current presentation leaves this untestable.
major comments (1)
- The manuscript provides no explicit literature-search protocol (databases, keywords, date ranges, or inclusion/exclusion criteria). Because the central claim is that the review is comprehensive and identifies the most critical challenges, the absence of a methods section makes the representativeness of the cited literature impossible to assess and constitutes a load-bearing weakness.
minor comments (2)
- The abstract states the scope is limited to 'wheelless terrestrial locomotive systems' yet the title is 'Terrestrial Soft Mobile Robots: A Review'; a brief clarification of scope boundaries in the introduction would help readers.
- Several figures (e.g., those summarizing actuation mechanisms) would benefit from consistent caption formatting and explicit citation of the original sources for each illustrated robot.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's report on our manuscript 'Terrestrial Soft Mobile Robots: A Review'. We appreciate the constructive criticism and have prepared a point-by-point response to the major comment. We plan to make revisions to address the identified weakness.
read point-by-point responses
-
Referee: The manuscript provides no explicit literature-search protocol (databases, keywords, date ranges, or inclusion/exclusion criteria). Because the central claim is that the review is comprehensive and identifies the most critical challenges, the absence of a methods section makes the representativeness of the cited literature impossible to assess and constitutes a load-bearing weakness.
Authors: We concur that documenting the literature search methodology is essential for establishing the scope and representativeness of a review article. Our review was compiled through a thorough examination of the existing literature on soft mobile robots, utilizing major academic search engines and focusing on peer-reviewed publications and key conference proceedings from the past two decades. However, we acknowledge that an explicit protocol was not provided in the original submission. In the revised manuscript, we will add a 'Literature Search Methodology' section that specifies the databases (such as IEEE Xplore, ScienceDirect, and Google Scholar), the primary keywords employed (including 'soft robot', 'terrestrial locomotion', 'soft mobile robot', 'wheelless robot'), the date range (approximately 2000 to present), and the inclusion criteria (e.g., relevance to wheelless terrestrial locomotion, actuation, modeling, and control). Exclusion criteria will also be noted, such as works focused solely on aquatic or aerial soft robots. This revision will enable readers to better evaluate the comprehensiveness of our survey. revision: yes
Circularity Check
No circularity: review draws exclusively on external literature
full rationale
This is a narrative literature review with no equations, fitted parameters, predictions, or derivation chain. All content is presented as summaries of prior external work on locomotion, actuation, modeling, and control. The representativeness assumption is an untestable selection choice rather than a self-referential reduction; no step equates a claimed result to its own inputs by construction. The paper is self-contained against external benchmarks via citations to independent sources.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,”Nature, vol. 521, no. 7553, pp. 467–475, 2015
work page 2015
-
[2]
G. M. Whitesides, “Soft robotics,”Angewandte Chemie Int. Edition, vol. 57, no. 16, pp. 4258–4273, 2018
work page 2018
-
[3]
Fundamentals of soft robot locomotion,
M. Calisti, G. Picardi, and C. Laschi, “Fundamentals of soft robot locomotion,”Journal of The Royal Society Interface, vol. 14, no. 130, 2017
work page 2017
-
[4]
Roadmap on soft robotics: multifunctionality, adaptability and growth without borders,
B. Mazzolai, F. Carpi, K. Suzumori, M. Cianchetti, T. Speck, S. K. Smoukov, I. Burgert, T. Keplinger, G. Siqueira, F. Vannesteet al., “Roadmap on soft robotics: multifunctionality, adaptability and growth without borders,”Multifunctional Materials, 2022
work page 2022
-
[5]
Soft crawling robots: design, actuation, and locomotion,
S. Chen, Y . Cao, M. Sarparast, H. Yuan, L. Dong, X. Tan, and C. Cao, “Soft crawling robots: design, actuation, and locomotion,”Advanced Materials Technologies, vol. 5, no. 2, p. 1900837, 2020
work page 2020
-
[6]
Decade of bio-inspired soft robots: A review,
F. Ahmed, M. Waqas, B. Javed, A. M. Soomro, S. Kumar, H. Ashraf, U. Khan, K. hwan Kim, and K. H. Choi, “Decade of bio-inspired soft robots: A review,”Smart Materials and Structures, 2022
work page 2022
-
[7]
Soft actuators for soft robotic applications: a review,
N. El-Atab, R. B. Mishra, F. Al-Modaf, L. Joharji, A. A. Alsharif, H. Alamoudi, M. Diaz, N. Qaiser, and M. M. Hussain, “Soft actuators for soft robotic applications: a review,”Advanced Intelligent Systems, vol. 2, no. 10, p. 2000128, 2020
work page 2020
-
[8]
Soft robots for ocean exploration and offshore operations: A perspective,
S. Aracri, F. Giorgio-Serchi, G. Suaria, M. E. Sayed, M. P. Nemitz, S. Mahon, and A. A. Stokes, “Soft robots for ocean exploration and offshore operations: A perspective,”Soft Robotics, vol. 8, no. 6, pp. 625–639, 2021
work page 2021
-
[9]
A soft robot that navigates its environment through growth,
E. W. Hawkes, L. H. Blumenschein, J. D. Greer, and A. M. Okamura, “A soft robot that navigates its environment through growth,”Science Robotics, vol. 2, no. 8, p. eaan3028, 2017
work page 2017
-
[10]
T. T. Oshiro, “Soft robotics in radiation environments: A prospective study of an emerging automated technology for existing nuclear appli- cations,” 2018
work page 2018
-
[11]
Untethered soft robots for future planetary explorations?
C. S. X. Ng and G. Z. Lum, “Untethered soft robots for future planetary explorations?”Advanced Intelligent Systems, p. 2100106, 2021
work page 2021
-
[12]
Progress, challenges, and prospects of soft robotics for space applications,
Y . Zhang, P. Li, J. Quan, L. Li, G. Zhang, and D. Zhou, “Progress, challenges, and prospects of soft robotics for space applications,” Advanced Intelligent Systems, p. 2200071, 2022
work page 2022
-
[13]
Soft robots manufac- turing: A review,
F. Schmitt, O. Piccin, L. Barbé, and B. Bayle, “Soft robots manufac- turing: A review,”Frontiers in Robotics and AI, vol. 5, p. 84, 2018
work page 2018
-
[14]
Bio-inspired robots and structures toward fostering the modernization of agriculture,
M. Kondoyanni, D. Loukatos, C. Maraveas, C. Drosos, and K. G. Arvanitis, “Bio-inspired robots and structures toward fostering the modernization of agriculture,”Biomimetics, vol. 7, no. 2, p. 69, 2022
work page 2022
-
[15]
Tendon-driven soft robotic gripper for blackberry harvest- ing,
A. L. Gunderman, J. A. Collins, A. L. Myers, R. T. Threlfall, and Y . Chen, “Tendon-driven soft robotic gripper for blackberry harvest- ing,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2652– 2659, 2022
work page 2022
-
[16]
Soft robot skin with conformal adaptability for on-body tactile perception of collaborative robots,
Z. Ye, G. Pang, K. Xu, Z. Hou, H. Lv, Y . Shen, and G. Yang, “Soft robot skin with conformal adaptability for on-body tactile perception of collaborative robots,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5127–5134, 2022
work page 2022
-
[17]
Soft mobile robots: a review of soft robotic locomotion modes,
Y . Sun, A. Abudula, H. Yang, S.-S. Chiang, Z. Wan, S. Ozel, R. Hall, E. Skorina, M. Luo, and C. D. Onal, “Soft mobile robots: a review of soft robotic locomotion modes,”Current Robotics Reports, pp. 1–27, 2021
work page 2021
-
[18]
Locomotion and gait analysis of multi-limb soft robots driven by smart actuators,
S. Mao, E. Dong, H. Jin, M. Xu, and K. Low, “Locomotion and gait analysis of multi-limb soft robots driven by smart actuators,” in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2016, pp. 2438–2443
work page 2016
-
[19]
Trajectory optimiza- tion for cable-driven soft robot locomotion
J. M. Bern, P. Banzet, R. Poranne, and S. Coros, “Trajectory optimiza- tion for cable-driven soft robot locomotion.” inRobotics: Science and Systems, vol. 1, no. 3, 2019
work page 2019
-
[20]
Design and modeling of tetrahedral soft- legged robot for multi-gait locomotion,
Y . Wang, J. Wang, and Y . Fei, “Design and modeling of tetrahedral soft- legged robot for multi-gait locomotion,”IEEE/ASME Transactions on Mechatronics, 2021
work page 2021
-
[21]
Teleoperation of soft modular robots: Study on real-time stability and gait control,
D. M. Perera, D. D. Arachchige, S. Mallikarachchi, T. Ghafoor, I. Kanj, Y . Chen, and I. S. Godage, “Teleoperation of soft modular robots: Study on real-time stability and gait control,” inIEEE Intl. Conf. on Soft Robotics (RoboSoft), 2023, pp. 01–07
work page 2023
-
[22]
Study on soft robotic pin- niped locomotion,
D. D. Arachchige, T. Varshney, U. Huzaifa, I. Kanj, T. Nanayakkara, Y . Chen, H. B. Gilbert, and I. S. Godage, “Study on soft robotic pin- niped locomotion,” inIEEE/ASME Intl. Conf. on Advanced Intelligent Mechatronics (AIM), 2023, pp. 65–71
work page 2023
-
[23]
Tumbling locomotion of tetrahedral soft-limbed robots,
D. D. Arachchige, D. M. Perera, U. Huzaifa, I. Kanj, and I. S. Godage, “Tumbling locomotion of tetrahedral soft-limbed robots,” IEEE Robotics and Automation Letters, 2024
work page 2024
-
[24]
An untethered jumping soft robot,
M. T. Tolley, R. F. Shepherd, M. Karpelson, N. W. Bartlett, K. C. Galloway, M. Wehner, R. Nunes, G. M. Whitesides, and R. J. Wood, “An untethered jumping soft robot,” inIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2014, pp. 561–566
work page 2014
-
[25]
Locomotion with continuum limbs,
I. S. Godage, T. Nanayakkara, and D. G. Caldwell, “Locomotion with continuum limbs,” inIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2012, pp. 293–298
work page 2012
-
[26]
Design and gait analysis of a tortoise-like robot with soft limbs,
S. Mao, E. Dong, L. Zhou, H. Jin, Y . Tan, G. Liu, M. Xu, and K. H. Low, “Design and gait analysis of a tortoise-like robot with soft limbs,” inASSISTIVE ROBOTICS: Proceedings of the 18th International Conference on CLAWAR 2015. World Scientific, 2016, pp. 215–223
work page 2015
-
[27]
Precharged pneumatic soft actuators and their applications to untethered soft robots,
Y . Li, Y . Chen, T. Ren, Y . Li, and S. H. Choi, “Precharged pneumatic soft actuators and their applications to untethered soft robots,”Soft robotics, vol. 5, no. 5, pp. 567–575, 2018
work page 2018
-
[28]
X. Huang, K. Kumar, M. K. Jawed, Z. Ye, and C. Majidi, “Soft electrically actuated quadruped (seaq)—integrating a flex circuit board and elastomeric limbs for versatile mobility,”IEEE Robotics and Automation Letters, vol. 4, no. 3, pp. 2415–2422, 2019
work page 2019
-
[29]
Design, fabrication, and locomotion analysis of an untethered miniature soft quadruped, squad,
M. A. I. Kalın, C. Aygül, A. Türkmen, J. Kwiczak-Yi ˘gitba¸ sı, B. Baytekin, and O. Özcan, “Design, fabrication, and locomotion analysis of an untethered miniature soft quadruped, squad,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3854–3860, 2020
work page 2020
-
[30]
Origami pump actuator based pneumatic quadruped robot (oparo),
Y . Kim, Y . Lee, and Y . Cha, “Origami pump actuator based pneumatic quadruped robot (oparo),”IEEE Access, vol. 9, pp. 41 010–41 018, 2021
work page 2021
-
[31]
Dynamic turning of a soft quadruped robot by changing phase difference,
H. Tanaka, T.-Y . Chen, and K. Hosoda, “Dynamic turning of a soft quadruped robot by changing phase difference,”Frontiers in Robotics and AI, vol. 8, p. 629523, 2021
work page 2021
-
[32]
A soft quadruped robot enabled by continuum actuators,
S. T. Muralidharan, R. Zhu, Q. Ji, L. Feng, X. V . Wang, and L. Wang, “A soft quadruped robot enabled by continuum actuators,” inIEEE Intl. Conf. on Automation Science and Engineering (CASE), 2021, pp. 834–840
work page 2021
-
[33]
A legged soft robot platform for dynamic locomotion,
B. Xia, J. Fu, H. Zhu, Z. Song, Y . Jiang, and H. Lipson, “A legged soft robot platform for dynamic locomotion,” inIEEE Intl. Conf. on Robotics and Automation (ICRA), 2021, pp. 11 812–11 819
work page 2021
-
[34]
Untethered cable-driven soft actuators for quadruped robots,
S. Gong, J. Wu, T. Zheng, W.-M. Zhang, and L. Shao, “Untethered cable-driven soft actuators for quadruped robots,” inIEEE Intl. Conf. on Mechatronics and Machine Vision in Practice (M2VIP), 2021, pp. 417–422
work page 2021
-
[35]
Reconfigurable soft robots by building blocks,
M. G. Atia, A. Mohammad, A. Gameros, D. Axinte, and I. Wright, “Reconfigurable soft robots by building blocks,”Advanced Science, p. 2203217, 2022
work page 2022
-
[36]
Q. Ji, S. Fu, K. Tan, S. T. Muralidharan, K. Lagrelius, D. Danelia, G. Andrikopoulos, X. V . Wang, L. Wang, and L. Feng, “Synthesizing the optimal gait of a quadruped robot with soft actuators using deep reinforcement learning,”Robotics and Computer-Integrated Manufac- turing, vol. 78, p. 102382, 2022
work page 2022
-
[37]
M. Wu, X. Xu, Q. Zhao, W. H. Afridi, N. Hou, R. H. Afridi, X. Zheng, C. Wang, and G. Xie, “A fully 3d-printed tortoise-inspired soft robot with terrains-adaptive and amphibious landing capabilities,”Advanced Materials Technologies, p. 2200536, 2022
work page 2022
-
[38]
R. F. Shepherd, F. Ilievski, W. Choi, S. A. Morin, A. A. Stokes, A. D. Mazzeo, X. Chen, M. Wang, and G. M. Whitesides, “Multigait soft robot,”Proceedings of the national academy of sciences, vol. 108, no. 51, pp. 20 400–20 403, 2011. 19
work page 2011
-
[39]
A resilient, untethered soft robot,
M. T. Tolley, R. F. Shepherd, B. Mosadegh, K. C. Galloway, M. Wehner, M. Karpelson, R. J. Wood, and G. M. Whitesides, “A resilient, untethered soft robot,”Soft Robotics, vol. 1, no. 3, pp. 213– 223, 2014
work page 2014
-
[40]
Soft-amphibious robot using thin and soft mckibben actuator,
A. A. M. Faudzi, M. R. M. Razif, G. Endo, H. Nabae, and K. Suzumori, “Soft-amphibious robot using thin and soft mckibben actuator,” inIEEE Intl. Conf. on Advanced Intelligent Mechatronics (AIM), 2017, pp. 981– 986
work page 2017
-
[41]
Y . Tang, Y . Chi, J. Sun, T.-H. Huang, O. H. Maghsoudi, A. Spence, J. Zhao, H. Su, and J. Yin, “Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots,” Science advances, vol. 6, no. 19, p. eaaz6912, 2020
work page 2020
-
[42]
Toward a gecko-inspired, climbing soft robot,
L. Schiller, A. Seibel, and J. Schlattmann, “Toward a gecko-inspired, climbing soft robot,”Frontiers in neurorobotics, vol. 13, p. 106, 2019
work page 2019
-
[43]
A gait pattern generator for closed-loop position control of a soft walking robot,
——, “A gait pattern generator for closed-loop position control of a soft walking robot,”Frontiers in Robotics and AI, vol. 7, p. 87, 2020
work page 2020
-
[44]
A quadruped soft robot for climbing parallel rods,
N. Zhu, H. Zang, B. Liao, H. Qi, Z. Yang, M. Chen, X. Lang, and Y . Wang, “A quadruped soft robot for climbing parallel rods,”Robotica, vol. 39, no. 4, pp. 686–698, 2021
work page 2021
-
[45]
Remote control of a soft walking robot,
L. Schiller and A. Seibel, “Remote control of a soft walking robot,” in IEEE Intl. Conf. on Soft Robotics (RoboSoft), 2021, pp. 535–538
work page 2021
-
[46]
Soft steps: Exploring quadrupedal locomotion with modular soft robots,
D. D. Arachchige, D. M. Perera, S. Mallikarachchi, I. Kanj, and I. S. Godage, “Soft steps: Exploring quadrupedal locomotion with modular soft robots,”IEEE Access, vol. 11, pp. 63 136–63 148, 2023
work page 2023
-
[47]
A hybrid combining hard and soft robots,
A. A. Stokes, R. F. Shepherd, S. A. Morin, F. Ilievski, and G. M. Whitesides, “A hybrid combining hard and soft robots,”Soft Robotics, vol. 1, no. 1, pp. 70–74, 2014
work page 2014
-
[48]
A starfish inspired robot with multi- directional tube feet locomotion,
A. Poungrat and T. Maneewarn, “A starfish inspired robot with multi- directional tube feet locomotion,” inIEEE Intl. Conf. on Robotics and Biomimetics (ROBIO), 2017, pp. 712–717
work page 2017
-
[49]
3d printed soft actuators for a legged robot capable of navigating unstructured terrain,
D. Drotman, S. Jadhav, M. Karimi, P. de Zonia, and M. T. Tolley, “3d printed soft actuators for a legged robot capable of navigating unstructured terrain,” inIEEE Intl. Conf. on Robotics and Automation (ICRA), 2017, pp. 5532–5538
work page 2017
-
[50]
Application- driven design of soft, 3-d printed, pneumatic actuators with bellows,
D. Drotman, M. Ishida, S. Jadhav, and M. T. Tolley, “Application- driven design of soft, 3-d printed, pneumatic actuators with bellows,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 1, pp. 78–87, 2018
work page 2018
-
[51]
Electronics-free pneumatic circuits for controlling soft-legged robots,
D. Drotman, S. Jadhav, D. Sharp, C. Chan, and M. T. Tolley, “Electronics-free pneumatic circuits for controlling soft-legged robots,” Science Robotics, vol. 6, no. 51, 2021
work page 2021
-
[52]
M. Feng, D. Yang, C. Majidi, and G. Gu, “High-speed and low- energy actuation for pneumatic soft robots with internal exhaust air recirculation,”Authorea Preprints, 2022
work page 2022
-
[53]
Y . Li, T. Ren, Y . Li, Q. Liu, and Y . Chen, “Untethered-bioinspired quadrupedal robot based on double-chamber pre-charged pneumatic soft actuators with highly flexible trunk,”Soft Robotics, vol. 8, no. 1, pp. 97–108, 2021
work page 2021
-
[54]
Scaling up soft robotics: a meter-scale, modular, and reconfigurable soft robotic system,
S. Li, S. A. Awale, K. E. Bacher, T. J. Buchner, C. Della Santina, R. J. Wood, and D. Rus, “Scaling up soft robotics: a meter-scale, modular, and reconfigurable soft robotic system,”Soft Robotics, vol. 9, no. 2, pp. 324–336, 2022
work page 2022
-
[55]
Fully 3d-printed tortoise-like soft mobile robot with muti-scenarios adaptability,
L. Sun, J. Wan, and T. Du, “Fully 3d-printed tortoise-like soft mobile robot with muti-scenarios adaptability,”Bioinspiration and Biomimet- ics, 2023
work page 2023
-
[56]
Motorized, untethered soft robots via 3d printed auxetics,
P. Kaarthik, F. L. Sanchez, J. Avtges, and R. L. Truby, “Motorized, untethered soft robots via 3d printed auxetics,”Soft Matter, vol. 18, no. 43, pp. 8229–8237, 2022
work page 2022
-
[57]
Automated gait generation for walking, soft robotic quadrupeds,
J. Ketchum, S. Schiffer, M. Sun, P. Kaarthik, R. L. Truby, and T. D. Murphey, “Automated gait generation for walking, soft robotic quadrupeds,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 10 245–10 251
work page 2023
-
[58]
A quadrupedal soft robot based on kresling origami actuators,
Y . Yang, S. Yan, M. Dai, Y . Xie, and J. Liu, “A quadrupedal soft robot based on kresling origami actuators,” inChinese Intelligent Automation Conference. Springer, 2023, pp. 417–426
work page 2023
-
[59]
Dynamic walking with a soft limb robot,
Y . Ansari, A. L. Shoushtari, V . Cacucciolo, M. Cianchetti, and C. Laschi, “Dynamic walking with a soft limb robot,” inConference on Biomimetic and Biohybrid Systems. Springer, 2015, pp. 13–25
work page 2015
-
[60]
Fast untethered soft robotic crawler with elastic instability,
Z. Xiong, Y . Su, and H. Lipson, “Fast untethered soft robotic crawler with elastic instability,” inIEEE Intl. Conf. on Robotics and Automation (ICRA), 2023, pp. 2606–2612
work page 2023
-
[61]
Body-induced soft robotic locomotion: A sim-to-real approach,
Z. Wang, S. Mallikarachchi, D. D. Arachchige, D. M. Perera, P. Thammi, and I. S. Godage, “Body-induced soft robotic locomotion: A sim-to-real approach,” in2025 22nd International Conference on Ubiquitous Robots (UR). IEEE, 2025, pp. 535–541
work page 2025
-
[62]
Simplified modeling of hybrid soft robots with constant stiffness assumption,
U. Huzaifa, D. D. Arachchige, M. A. U. Zaman, and U. Syed, “Simplified modeling of hybrid soft robots with constant stiffness assumption,” in2023 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2023, pp. 1–6
work page 2023
-
[63]
Path planning for continuum arms in dynamic environments,
B. H. Meng, D. D. Arachchige, I. S. Godage, and I. Kanj, “Path planning for continuum arms in dynamic environments,” in2024 IEEE 7th International Conference on Soft Robotics (RoboSoft). IEEE, 2024, pp. 900–905
work page 2024
-
[64]
Combining locomotion and grasping functionalities in soft robots,
A. Yin, H.-C. Lin, J. Thelen, B. Mahner, and T. Ranzani, “Combining locomotion and grasping functionalities in soft robots,”Advanced Intelligent Systems, vol. 1, no. 8, p. 1900089, 2019
work page 2019
-
[65]
Influence of surface traction on soft robot undulation,
C. Majidi, R. F. Shepherd, R. K. Kramer, G. M. Whitesides, and R. J. Wood, “Influence of surface traction on soft robot undulation,”The International Journal of Robotics Research, vol. 32, no. 13, pp. 1577– 1584, 2013
work page 2013
-
[66]
Tetraflex: A multigait soft robot for object transportation in confined environments,
P. Wharton, T. L. You, G. P. Jenkinson, R. S. Diteesawat, N. H. Le, E.- C. Hall, M. Garrad, A. T. Conn, and J. Rossiter, “Tetraflex: A multigait soft robot for object transportation in confined environments,”IEEE Robotics and Automation Letters, 2023
work page 2023
-
[67]
Locomotion via active suction in a sea star-inspired soft robot,
M. Ishida, J. A. Sandoval, S. Lee, S. Huen, and M. T. Tolley, “Locomotion via active suction in a sea star-inspired soft robot,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 304–10 311, 2022
work page 2022
-
[68]
On planar discrete elastic rod models for the locomotion of soft robots,
N. N. Goldberg, X. Huang, C. Majidi, A. Novelia, O. M. O’Reilly, D. A. Paley, and W. L. Scott, “On planar discrete elastic rod models for the locomotion of soft robots,”Soft Robotics, vol. 6, no. 5, pp. 595–610, 2019
work page 2019
-
[69]
Sorx: A soft pneumatic hexapedal robot to traverse rough, steep, and unstable terrain,
Z. Liu, Z. Lu, and K. Karydis, “Sorx: A soft pneumatic hexapedal robot to traverse rough, steep, and unstable terrain,” inIEEE Intl. Conf. on Robotics and Automation (ICRA), 2020, pp. 420–426
work page 2020
-
[70]
Position control and variable-height trajectory tracking of a soft pneumatic legged robot,
Z. Liu and K. Karydis, “Position control and variable-height trajectory tracking of a soft pneumatic legged robot,” inIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2021, pp. 1708–1709
work page 2021
-
[71]
Q. Shao, X. Dong, Z. Lin, C. Tang, H. Sun, X.-J. Liu, and H. Zhao, “Untethered robotic millipede driven by low-pressure microfluidic actuators for multi-terrain exploration,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 12 142–12 149, 2022
work page 2022
-
[72]
Omnidirectional walking of a quadruped robot enabled by compress- ible tendon-driven soft actuators,
Q. Ji, S. Fu, L. Feng, G. Andrikopoulos, X. V . Wang, and L. Wang, “Omnidirectional walking of a quadruped robot enabled by compress- ible tendon-driven soft actuators,” inIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2022, pp. 11 015–11 022
work page 2022
-
[73]
A new soft bionic starfish robot with multi-gaits,
S. Mao, E. Dong, S. Zhang, M. Xu, and J. Yang, “A new soft bionic starfish robot with multi-gaits,” inIEEE/ASME Intl. Conf. on Advanced Intelligent Mechatronics, 2013, pp. 1312–1317
work page 2013
-
[74]
Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by smas,
S. Mao, E. Dong, H. Jin, M. Xu, S. Zhang, J. Yang, and K. H. Low, “Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by smas,”Journal of Bionic Engineering, vol. 11, no. 3, pp. 400–411, 2014
work page 2014
-
[75]
H. Jin, E. Dong, M. Xu, C. Liu, G. Alici, and Y . Jie, “Soft and smart modular structures actuated by shape memory alloy (sma) wires as tentacles of soft robots,”Smart Materials and Structures, vol. 25, no. 8, p. 085026, 2016
work page 2016
-
[76]
A starfish robot based on soft and smart modular structure (sms) actuated by sma wires,
H. Jin, E. Dong, G. Alici, S. Mao, X. Min, C. Liu, K. Low, and J. Yang, “A starfish robot based on soft and smart modular structure (sms) actuated by sma wires,”Bioinspiration and Biomimetics, vol. 11, no. 5, p. 056012, 2016
work page 2016
-
[77]
Geometric gait design for a starfish- inspired robot using a planar discrete elastic rod model,
W. L. Scott and D. A. Paley, “Geometric gait design for a starfish- inspired robot using a planar discrete elastic rod model,”Advanced Intelligent Systems, vol. 2, no. 6, p. 1900186, 2020
work page 2020
-
[78]
3d-printed programmable tensegrity for soft robotics,
H. Lee, Y . Jang, J. K. Choe, S. Lee, H. Song, J. P. Lee, N. Lone, and J. Kim, “3d-printed programmable tensegrity for soft robotics,”Science Robotics, vol. 5, no. 45, p. eaay9024, 2020
work page 2020
-
[79]
Elastic materials producing compliant robots,
K. Suzumori, “Elastic materials producing compliant robots,”Robotics and Automation Systems, vol. 18, no. 1-2, pp. 135–140, 1996
work page 1996
-
[80]
Applications of flexible microactuators to walking robots,
K. Suzumori, F. Kondo, and H. Tanaka, “Applications of flexible microactuators to walking robots,” inVideo proc. of IEEE Intl. Conf. on Robotics and Automation, 2003
work page 2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.