SlipSense: Multimodal Sensing for Online Slip Detection in Legged Robots
Pith reviewed 2026-06-26 00:14 UTC · model grok-4.3
The pith
A multimodal sensorized foot paired with an LSTM model detects early slips in quadruped robots at an average 24mm displacement.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SlipSense integrates a multimodal sensor design with a LSTM-based model to infer ground reaction forces and detect slip-indicative anomalies during locomotion on a Unitree Go1 quadruped, achieving detection of early-stage slips at 24.1 +/-6.4mm average displacement with 85.9% accuracy, which is 3.3 times finer and 24% more accurate than a kinematic baseline.
What carries the argument
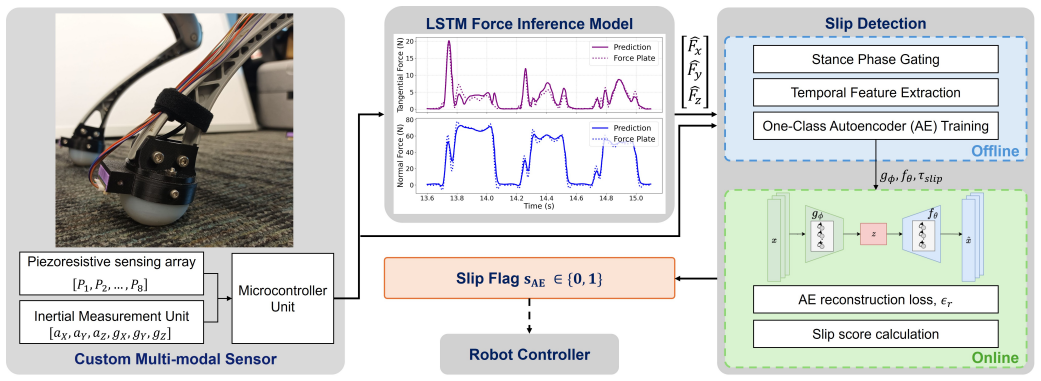
The multimodal sensorized foot that collects real-time data to feed into an LSTM model for inferring ground reaction forces and identifying slip anomalies.
If this is right
- Future controllers can use the detected forces to estimate terrain friction coefficients in real time.
- Gait planners can adjust step constraints dynamically to prevent escalation from early slip to full instability.
- The same sensor suite supports blind operation without external vision or motion capture.
- Overall locomotion stability improves on variable-friction surfaces through proactive rather than reactive responses.
Where Pith is reading between the lines
- The sensor foot could be scaled to other legged platforms if the LSTM is retrained on their dynamics.
- Adding the slip signal to existing state estimators might reduce reliance on expensive motion-capture validation.
- The framework opens a path to online friction mapping that could feed into model-predictive controllers.
Load-bearing premise
The multimodal sensor design and LSTM model can reliably infer ground reaction forces and identify slip-indicative anomalies from real-time data collected during locomotion on the Unitree Go1.
What would settle it
An experiment on the same robot over a new slippery surface where minimum detectable displacement exceeds 50mm or accuracy falls below 70 percent would falsify the claimed performance.
Figures





read the original abstract
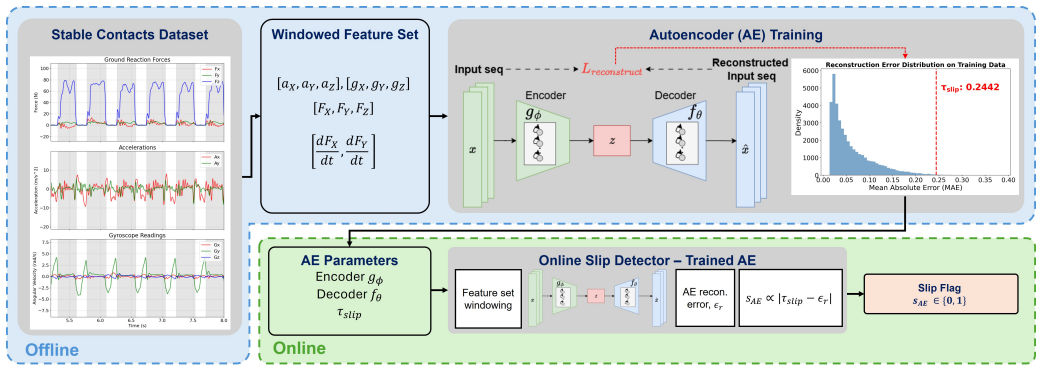
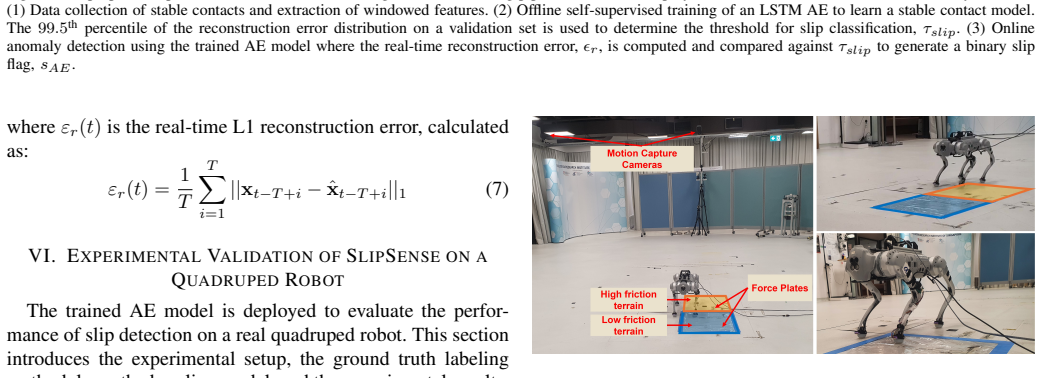
Legged robots rely on accurate ground interaction awareness to traverse variable terrains, such as slippery surfaces. Existing slip detection methods often rely on kinematics and proprioception, which lack the sensitivity to detect early-stage slips that occur prior to catastrophic instability. Thus, this paper presents SlipSense, a novel framework for online force-based slip detection using a custom lightweight sensorized foot for quadrupeds to detect slip. The framework integrates a multimodal sensor design with a LSTM-based model to infer ground reaction forces and detect slip-indicative anomalies during locomotion. The proposed framework is deployed on a Unitree Go1 quadruped to demonstrate blind online slip detection over a slippery terrain. Our method detects early-stage slips down to an average displacement of 24.1 +/-6.4mm with an overall accuracy of 85.9%. This represents a 3.3-fold finer detection resolution and a 24% relative accuracy improvement over a standard kinematic baseline that uses foot velocity inferred through state estimation. The work in this paper serves as a foundation for force-aware gait adaptation in legged robotic locomotion, allowing future controllers to estimate terrain friction and adjust constraints, thus improving the overall stability of the system.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces SlipSense, a framework for online slip detection in legged robots. It uses a custom lightweight multimodal sensorized foot on a quadruped combined with an LSTM model to infer ground reaction forces and detect slip-indicative anomalies in real time. The work reports hardware deployment on a Unitree Go1, claiming detection of early-stage slips at an average displacement of 24.1 +/- 6.4 mm with 85.9% overall accuracy. This is presented as a 3.3-fold finer resolution and 24% relative accuracy improvement over a standard kinematic baseline relying on state-estimation foot velocity. The framework is positioned as a foundation for force-aware gait adaptation and terrain friction estimation.
Significance. If the experimental claims hold after proper validation, the result would provide a practical hardware-software approach to earlier slip detection than kinematics alone, with direct applicability to improving stability on variable terrains. The reported numbers, if independently verifiable, would constitute a concrete, falsifiable performance benchmark for force-based sensing in commercial quadrupeds.
major comments (3)
- [Abstract] Abstract: the central performance claims (average slip displacement of 24.1 +/-6.4 mm at detection, 85.9% accuracy, 3.3-fold resolution improvement) are stated without any description of the ground-truth measurement method used to quantify actual foot displacement at the instant the LSTM flags a slip. No mention is made of motion capture, external encoders, or an independent reference system, so the resolution and accuracy numbers cannot be verified.
- [Abstract] Abstract: the comparison to the kinematic baseline is load-bearing for the claimed improvement, yet the manuscript supplies no information on how slip events were labeled or whether the ground-truth displacement shares the same state-estimation pipeline used by the baseline. If labeling depends on the baseline estimator, the reported 3.3-fold gain is circular by construction.
- [Abstract] Abstract: no details are provided on sensor calibration procedures, data collection protocol (e.g., number of trials, terrain types, locomotion speeds), LSTM architecture/training procedure, validation splits, or statistical testing. These omissions make it impossible to assess whether the reported accuracy and displacement figures are supported by the collected data.
Simulated Author's Rebuttal
We thank the referee for the careful review and for identifying the lack of supporting methodological information in the abstract. We agree that the abstract, in its current form, does not supply enough detail for independent verification of the reported performance metrics. We will revise the abstract to incorporate concise descriptions of the ground-truth method, labeling procedure, and experimental protocol while preserving its length constraints.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central performance claims (average slip displacement of 24.1 +/-6.4 mm at detection, 85.9% accuracy, 3.3-fold resolution improvement) are stated without any description of the ground-truth measurement method used to quantify actual foot displacement at the instant the LSTM flags a slip. No mention is made of motion capture, external encoders, or an independent reference system, so the resolution and accuracy numbers cannot be verified.
Authors: We agree that the abstract omits any description of the ground-truth measurement method. This information will be added to the revised abstract. revision: yes
-
Referee: [Abstract] Abstract: the comparison to the kinematic baseline is load-bearing for the claimed improvement, yet the manuscript supplies no information on how slip events were labeled or whether the ground-truth displacement shares the same state-estimation pipeline used by the baseline. If labeling depends on the baseline estimator, the reported 3.3-fold gain is circular by construction.
Authors: We agree that the abstract provides no information on slip-event labeling or its relationship to the kinematic baseline. We will revise the abstract to state that labeling was performed with an independent reference system distinct from the baseline's state estimator. revision: yes
-
Referee: [Abstract] Abstract: no details are provided on sensor calibration procedures, data collection protocol (e.g., number of trials, terrain types, locomotion speeds), LSTM architecture/training procedure, validation splits, or statistical testing. These omissions make it impossible to assess whether the reported accuracy and displacement figures are supported by the collected data.
Authors: We agree that the abstract contains none of the requested experimental details. We will add a short summary of the sensor calibration, data-collection protocol, model architecture, and validation approach to the revised abstract. revision: yes
Circularity Check
No circularity; experimental performance metrics from hardware tests
full rationale
The paper reports results from physical deployment of a multimodal foot sensor and LSTM model on the Unitree Go1 quadruped, claiming measured slip detection resolution and accuracy against a kinematic baseline. No derivation chain, equations, fitted parameters renamed as predictions, or self-citations appear in the provided text. The claims rest on direct experimental outcomes rather than any self-referential construction or reduction to inputs by definition. This matches the default case of a self-contained experimental robotics paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Multimodal sensor data from the custom foot can be used to infer ground reaction forces and detect slip-indicative anomalies during locomotion
Reference graph
Works this paper leans on
-
[1]
Contact model fusion for event-based locomotion in unstructured ter- rains
Gerardo Bledt, Patrick M Wensing, Sam Ingersoll, and Sangbae Kim. Contact model fusion for event-based locomotion in unstructured ter- rains. In2018 IEEE International Conference on Robotics and Automa- tion (ICRA), pages 4399–4406. IEEE, 2018
2018
-
[2]
The MIT super mini cheetah: A small, low-cost quadrupedal robot for dynamic locomotion
Will Bosworth, Sangbae Kim, and Neville Hogan. The MIT super mini cheetah: A small, low-cost quadrupedal robot for dynamic locomotion. In2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pages 1–8. IEEE, 2015
2015
-
[3]
Slip detection and recovery for quadruped robots
Michele Focchi, Victor Barasuol, Marco Frigerio, Darwin G Caldwell, and Claudio Semini. Slip detection and recovery for quadruped robots. Robotics Research: V olume 2, pages 185–199, 2017
2017
-
[4]
Slip detec- tion and recovery for quadruped robots via orthogonal decomposition
Chengzhen Yan, Jiahu Qin, Qingchen Liu, and Qichao Ma. Slip detec- tion and recovery for quadruped robots via orthogonal decomposition. IEEE Transactions on Industrial Electronics, 2024
2024
-
[5]
Robust rough-terrain locomotion with a quadrupedal robot
P ´eter Fankhauser, Marko Bjelonic, C Dario Bellicoso, Takahiro Miki, and Marco Hutter. Robust rough-terrain locomotion with a quadrupedal robot. In2018 IEEE International Conference on Robotics and Automa- tion (ICRA), pages 5761–5768. IEEE, 2018
2018
-
[6]
Extended active observer for force estimation and disturbance rejection of robotic manip- ulators.Robotics and Autonomous Systems, 61(12):1277–1287, 2013
Linping Chan, Fazel Naghdy, and David Stirling. Extended active observer for force estimation and disturbance rejection of robotic manip- ulators.Robotics and Autonomous Systems, 61(12):1277–1287, 2013
2013
-
[7]
Contact force estimation method of legged-robot and its application in impedance control.IEEE Access, 8:161175–161187, 2020
Zhang Cong, An Honglei, Chengye Wu, Lin Lang, Qing Wei, and Ma Hongxu. Contact force estimation method of legged-robot and its application in impedance control.IEEE Access, 8:161175–161187, 2020
2020
-
[8]
Walking on TacTip toes: A tactile sensing foot for walking robots
Elizabeth A Stone, Nathan F Lepora, and David AW Barton. Walking on TacTip toes: A tactile sensing foot for walking robots. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 9869–9875. IEEE, 2020
2020
-
[9]
Bi-modal hemispherical sensors for dynamic locomotion and manipulation
Lindsay Epstein, Andrew SaLoutos, Donghyun Kim, and Sangbae Kim. Bi-modal hemispherical sensors for dynamic locomotion and manipulation. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7381–7381. IEEE, 2020
2020
-
[10]
Foottile: a rugged foot sensor for force and center of pressure sensing in soft terrain
Felix Ruppert and Alexander Badri-Spr ¨owitz. Foottile: a rugged foot sensor for force and center of pressure sensing in soft terrain. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 4810–4816. IEEE, 2020
2020
-
[11]
Integrated ground reaction force sensing and terrain classifi- cation for small legged robots.IEEE Robotics and Automation Letters, 1(2):1125–1132, 2016
X Alice Wu, Tae Myung Huh, Rudranarayan Mukherjee, and Mark Cutkosky. Integrated ground reaction force sensing and terrain classifi- cation for small legged robots.IEEE Robotics and Automation Letters, 1(2):1125–1132, 2016
2016
-
[12]
Tactile sensing and terrain-based gait control for small legged robots.IEEE Transactions on Robotics, 36(1):15–27, 2019
X Alice Wu, Tae Myung Huh, Aaron Sabin, Srinivasan A Suresh, and Mark R Cutkosky. Tactile sensing and terrain-based gait control for small legged robots.IEEE Transactions on Robotics, 36(1):15–27, 2019
2019
-
[13]
Tactid: High-performance visuo-tactile sensor-based terrain identification for legged robots.IEEE Sensors Journal, 2024
Ziwu Song, Chenchang Li, Zhentan Quan, Shilong Mu, Xiaosa Li, Ziyi Zhao, Wanxin Jin, Chenye Wu, Wenbo Ding, and Xiao-Ping Zhang. Tactid: High-performance visuo-tactile sensor-based terrain identification for legged robots.IEEE Sensors Journal, 2024
2024
-
[14]
Quadrupedal locomotion on uneven terrain with sensorized feet.IEEE Robotics and Automation Letters, 5(2):1548–1555, 2020
Giorgio Valsecchi, Ruben Grandia, and Marco Hutter. Quadrupedal locomotion on uneven terrain with sensorized feet.IEEE Robotics and Automation Letters, 5(2):1548–1555, 2020
2020
-
[15]
Soft foot sensor design and terrain classification for dynamic legged locomotion
Xiaofeng Guo, Bryan Blaise, Jennifer Molnar, Jeremiah Coholich, Shantanu Padte, Ye Zhao, and Frank L Hammond. Soft foot sensor design and terrain classification for dynamic legged locomotion. In 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), pages 550–557. IEEE, 2020
2020
-
[16]
Evaluation of ground slipperiness during collision using MEMS local slip sensor
Taiyu Okatani and Isao Shimoyama. Evaluation of ground slipperiness during collision using MEMS local slip sensor. In2019 IEEE 32nd In- ternational Conference on Micro Electro Mechanical Systems (MEMS), pages 823–825. IEEE, 2019
2019
-
[17]
Design of anti-skid foot with passive slip detection mechanism for conditional utilization of heterogeneous foot pads.IEEE Robotics and Automation Letters, 4(2):1170–1177, 2019
Jaejun Park and Hae-Won Park. Design of anti-skid foot with passive slip detection mechanism for conditional utilization of heterogeneous foot pads.IEEE Robotics and Automation Letters, 4(2):1170–1177, 2019
2019
-
[18]
Integrated barometric pressure sensors on legged robots for enhanced tactile exploration of edges.IEEE Robotics and Automation Letters, 2024
Thijs Van Hauwermeiren, Anatolii Sianov, Annelies Coene, and Guil- laume Crevecoeur. Integrated barometric pressure sensors on legged robots for enhanced tactile exploration of edges.IEEE Robotics and Automation Letters, 2024
2024
-
[19]
Walking on partial footholds including line contacts with the humanoid robot atlas
Georg Wiedebach, Sylvain Bertrand, Tingfan Wu, Luca Fiorio, Stephen McCrory, Robert Griffin, Francesco Nori, and Jerry Pratt. Walking on partial footholds including line contacts with the humanoid robot atlas. In2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pages 1312–1319. IEEE, 2016
2016
-
[20]
On slip detection for quadruped robots.Sensors, 22(8):2967, 2022
Ylenia Nistic `o, Shamel Fahmi, Lucia Pallottino, Claudio Semini, and Geoff Fink. On slip detection for quadruped robots.Sensors, 22(8):2967, 2022
2022
-
[21]
State estimation for legged robots on unstable and slippery terrain
Michael Bloesch, Christian Gehring, P ´eter Fankhauser, Marco Hutter, Mark A Hoepflinger, and Roland Siegwart. State estimation for legged robots on unstable and slippery terrain. In2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 6058–6064. IEEE, 2013
2013
-
[22]
Legged robot state estimation in slippery environments using invariant extended kalman filter with velocity update
Sangli Teng, Mark Wilfried Mueller, and Koushil Sreenath. Legged robot state estimation in slippery environments using invariant extended kalman filter with velocity update. In2021 IEEE International Con- ference on Robotics and Automation (ICRA), pages 3104–3110. IEEE, 2021
2021
-
[23]
Michael Maravgakis, Despina-Ekaterini Argiropoulos, Stylianos Piper- akis, and Panos Trahanias. Probabilistic contact state estima- tion for legged robots using inertial information.arXiv preprint arXiv:2303.00538, 2023
arXiv 2023
-
[24]
Learning slip detection for agile locomotion of quadruped robots
Peng Sun, Junjie Qiang, Letian Qian, and Xin Luo. Learning slip detection for agile locomotion of quadruped robots. In2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pages 1–6. IEEE, 2023
2023
-
[25]
Bi-modal hemispherical sensor: A unifying solution for three axis force and contact angle measurement
Meng Yee Michael Chuah, Lindsay Epstein, Donghyun Kim, Juan Romero, and Sangbae Kim. Bi-modal hemispherical sensor: A unifying solution for three axis force and contact angle measurement. In2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7968–7975. IEEE, 2019
2019
-
[26]
Enabling force sens- ing during ground locomotion: A bio-inspired, multi-axis, composite force sensor using discrete pressure mapping.IEEE Sensors Journal, 14(5):1693–1703, 2014
Meng Yee Michael Chuah and Sangbae Kim. Enabling force sens- ing during ground locomotion: A bio-inspired, multi-axis, composite force sensor using discrete pressure mapping.IEEE Sensors Journal, 14(5):1693–1703, 2014
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.