Embodying Intelligence into Mechanical Metamaterials via Reservoir Computing
Pith reviewed 2026-05-20 07:43 UTC · model grok-4.3
The pith
Mechanical metamaterials with contact nonlinearities can process vibrations as a physical reservoir computer using only linear readouts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
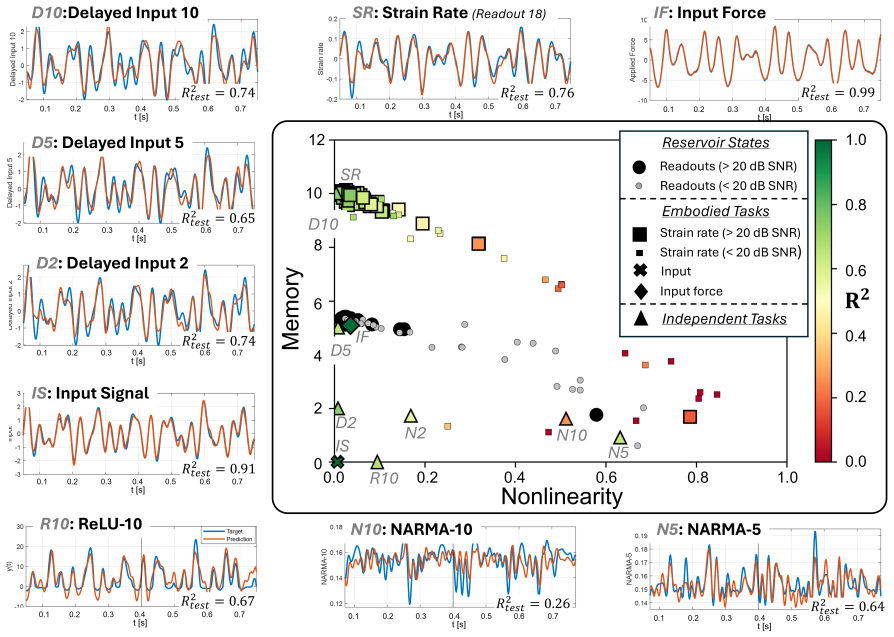
A metamaterial built from unit cells whose contact nonlinearities act as physical leaky ReLU activations functions as a reservoir computer. It maps input vibrations into a higher-dimensional space of spatially separated frequency responses; a trained linear readout on those responses then computes both independent benchmark tasks and embodied tasks coupled to the structure's dynamics.
What carries the argument
The metamaterial reservoir of unit cells with contact nonlinearities that generate ReLU-like transformations and separate input vibrations into new frequency content distributed across sensor readouts.
If this is right
- Nonlinearity supplied by physical contacts is essential for high performance on both benchmark and embodied tasks.
- The metamaterial remains effective across inputs that vary in complexity.
- Frequency separation across sensors directly drives task success, as confirmed by a greedy sensor-selection algorithm.
- A memory-versus-nonlinearity subspace can be used to predict how well a given metamaterial design will generalize across tasks.
Where Pith is reading between the lines
- Structures built this way could sense and react to their environment without any external processor.
- The same contact-nonlinearity principle might be scaled to larger mechanical systems for distributed, real-time adaptation.
- Designers could use the memory-nonlinearity metric to choose metamaterial geometries for specific sensing goals before fabrication.
Load-bearing premise
The physical contacts inside the unit cells produce consistent, repeatable nonlinear transformations under vibration without being disrupted by fabrication differences, hysteresis, or sensor noise.
What would settle it
Running the same tasks on an otherwise identical metamaterial in which the contacts are replaced by purely linear elastic connections and checking whether task accuracy falls to near-chance levels.
Figures




read the original abstract
This study harnesses the embodied intelligence of mechanical metamaterials to sense and process environmental vibrations with minimal digital computation. Using physical reservoir computing (PRC), we turn the metamaterial and its nonlinear dynamics into a physical neural network that nonlinearly transforms the input vibrations and uses a simple linear training to compute a range of tasks. We introduce a novel metamaterial reservoir composed of a network of unit cells with contact nonlinearities that are the physical equivalent of leaky rectified linear unit (ReLU) activation functions. We experimentally show that the metamaterial reservoir can compute two classes of tasks: independent tasks, such as benchmark functions, and embodied tasks, such as proprioception, which we introduce to describe tasks coupled to the structure's dynamics. By comparing against a linear metamaterial, we demonstrate that nonlinearity is critical for high task performance, and we show that the metamaterial is robust to inputs of varying complexity. Through dimensionality reduction, we uncover the governing information separation mechanism and show that the metamaterial separates the input vibrations into new frequency content spatially distributed across the sensor readouts. We then confirm that frequency content is a key indicator of task performance by conducting an optimal sensor selection study using a frequency-based greedy algorithm. Finally, we demonstrate that a metamaterial's generalized performance for different tasks can be quantified using the memory vs. nonlinearity subspace, providing a design tool for other reservoir abstractions. These results establish the embodied intelligence of mechanical metamaterials and provide a path for sense-assess-response in intelligent systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a mechanical metamaterial reservoir composed of unit cells with contact nonlinearities that emulate leaky ReLU activations. It experimentally demonstrates that this physical reservoir can perform independent benchmark tasks and embodied tasks such as proprioception, shows that nonlinearity is essential via direct comparison to a linear metamaterial control, identifies frequency-content separation across sensor readouts as the governing mechanism, and proposes a memory-versus-nonlinearity subspace metric as a design tool for reservoir performance.
Significance. If the experimental claims hold, the work advances physical reservoir computing by embedding computation directly into passive mechanical structures, enabling low-power vibration sensing and processing for intelligent systems. Credit is given for the explicit linear-metamaterial baseline comparison, the introduction of embodied proprioception tasks, and the frequency-based sensor-selection analysis that links mechanism to performance.
major comments (2)
- [Experimental validation] Experimental validation section: the claim that contact nonlinearities furnish stable, history-independent ReLU-like maps (central to the performance gap versus the linear control) is not supported by quantitative repeatability tests, hysteresis-loop measurements, or multi-trial statistics under sustained vibration; without these, fabrication scatter or micro-slip could produce the observed advantage as an artifact rather than the intended nonlinearity.
- [Results] Results on task performance and robustness: the reported superiority for benchmark and proprioceptive tasks lacks error bars, trial counts, or statistical significance tests, which is load-bearing for the assertion that the metamaterial is robust to inputs of varying complexity and that frequency separation is a reliable performance indicator.
minor comments (2)
- [Introduction] The definition of the embodied proprioception task could be stated more formally with explicit input-output mapping to avoid ambiguity with standard reservoir benchmarks.
- [Results] Figure captions for the frequency-separation visualizations should include the exact sensor locations and frequency bins used in the dimensionality-reduction analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of experimental rigor and statistical reporting that we have addressed through targeted revisions. Below we respond point by point to the major comments.
read point-by-point responses
-
Referee: [Experimental validation] Experimental validation section: the claim that contact nonlinearities furnish stable, history-independent ReLU-like maps (central to the performance gap versus the linear control) is not supported by quantitative repeatability tests, hysteresis-loop measurements, or multi-trial statistics under sustained vibration; without these, fabrication scatter or micro-slip could produce the observed advantage as an artifact rather than the intended nonlinearity.
Authors: We agree that additional quantitative characterization strengthens the central claim regarding the contact nonlinearities. In the revised manuscript we have expanded the Experimental validation section to include hysteresis-loop measurements obtained over repeated loading cycles under sustained vibration. We also report multi-trial statistics (n=10 independent trials per unit cell) demonstrating consistent ReLU-like maps with low variance across trials. These data confirm stability and history independence while indicating that fabrication scatter and micro-slip do not account for the observed performance differences relative to the linear control. revision: yes
-
Referee: [Results] Results on task performance and robustness: the reported superiority for benchmark and proprioceptive tasks lacks error bars, trial counts, or statistical significance tests, which is load-bearing for the assertion that the metamaterial is robust to inputs of varying complexity and that frequency separation is a reliable performance indicator.
Authors: We concur that error bars, explicit trial counts, and statistical tests are necessary to support the robustness and performance claims. The revised manuscript now includes error bars (standard deviation) on all task-performance figures, with trial counts explicitly stated (n=5 independent trials per task). We have added a statistical analysis subsection reporting p-values from paired t-tests that confirm significant differences between the nonlinear and linear metamaterials. These additions directly support the assertions regarding robustness to input complexity and the reliability of frequency separation as a performance indicator. revision: yes
Circularity Check
No circularity: experimental results grounded in physical measurements and baseline comparison
full rationale
The paper reports experimental demonstrations of reservoir computing tasks using a physical metamaterial with contact nonlinearities, including direct performance comparisons against a linear metamaterial control. Claims about task computation, frequency separation, and the importance of nonlinearity rest on measured sensor readouts and empirical robustness checks rather than any derivation that reduces by construction to fitted parameters, self-definitions, or self-citation chains. The work is self-contained against external benchmarks (physical experiments) with no load-bearing steps that equate predictions to inputs via the paper's own equations or prior author work.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Linear regression on sensor readouts is sufficient to extract task performance from the nonlinearly transformed physical states
- domain assumption Contact nonlinearities in the unit cells behave consistently and repeatably under the tested vibration inputs
invented entities (1)
-
Embodied tasks (proprioception)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
nonlinear beam unit cells with contact nonlinearities that are the physical equivalent of leaky rectified linear unit (ReLU) activation functions
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
nonlinearity vs. memory subspace... frequency content is a key indicator of task performance
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Herv´ e Abdi and Lynne J Williams. Princi- pal component analysis.Wiley interdisciplinary reviews: computational statistics, 2(4):433–459, 2010
work page 2010
-
[2]
Salvatore Ameduri and A Concilio. Morph- ing wings review: Aims, challenges, and cur- rent open issues of a technology.Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 237(18):4112–4130, 2023
work page 2023
-
[3]
Elsayed Atif Aner, Omar M Shehata, Mo- hammed Ibrahim Awad, and Nancy E ElHady. A decade of soft robotic manipulators: Advances in design, modeling, control, and emerging chal- lenges.Journal of Bionic Engineering, pages 1– 44, 2025
work page 2025
-
[4]
Priyanka Bhovad and Suyi Li. Physical reservoir computing with origami and its application to robotic crawling.Scientific Reports, 11(1):13002, 2021
work page 2021
-
[5]
Nonlinear mechanical metamaterial cloaks.Advanced Functional Materials, page e22895, 2025
Giovanni Bordiga, Jean-Gabriel Argaud, Au- drey A Watkins, Vincent Tournat, and Katia Bertoldi. Nonlinear mechanical metamaterial cloaks.Advanced Functional Materials, page e22895, 2025
work page 2025
-
[6]
Ting Bu, He Zhang, Santosh Kumar, Mingwei Jin, Prajnesh Kumar, and Yuping Huang. Ef- ficient optical reservoir computing for parallel data processing.Optics Letters, 47(15):3784– 3787, 2022. 15
work page 2022
-
[7]
Combina- torial design of textured mechanical metamate- rials.Nature, 535(7613):529–532, 2016
Corentin Coulais, Eial Teomy, Koen De Reus, Yair Shokef, and Martin Van Hecke. Combina- torial design of textured mechanical metamate- rials.Nature, 535(7613):529–532, 2016
work page 2016
-
[8]
Computing with networks of nonlinear mechanical oscillators.PloS one, 12(6):e0178663, 2017
Jean C Coulombe, Mark CA York, and Julien Sylvestre. Computing with networks of nonlinear mechanical oscillators.PloS one, 12(6):e0178663, 2017
work page 2017
-
[9]
Information pro- cessing capacity of dynamical systems.Scientific reports, 2(1):514, 2012
Joni Dambre, David Verstraeten, Benjamin Schrauwen, and Serge Massar. Information pro- cessing capacity of dynamical systems.Scientific reports, 2(1):514, 2012
work page 2012
-
[10]
Arameh Eyvazian, Yooseob Song, Chibukhchyan Hovhannes, Ardeshir Savari, and Narinderjit Singh Sawaran Singh. State-of-the-art soft robotic systems for unstructured and real-world environments: A systematic review.Engineering Science and Technology, an International Jour- nal, 73:102264, 2026
work page 2026
-
[11]
Twin vortex computer in fluid flow.New Journal of Physics, 23(6):063051, 2021
Ken Goto, Kohei Nakajima, and Hirofumi Notsu. Twin vortex computer in fluid flow.New Journal of Physics, 23(6):063051, 2021
work page 2021
-
[12]
Programmable elastic metamaterials
Babak Haghpanah, Hamid Ebrahimi, Davood Mousanezhad, Jonathan Hopkins, and Ashkan Vaziri. Programmable elastic metamaterials. Advanced Engineering Materials, 18(4):643–649, 2016
work page 2016
-
[13]
Physical reser- voir computing on a soft bio-inspired swimmer
Shan He and Patrick Musgrave. Physical reser- voir computing on a soft bio-inspired swimmer. Neural Networks, 181:106766, 2025
work page 2025
-
[14]
Shan He and Patrick F Musgrave. The role of nonlinearity, dimensionality, memory, and input on a mechanical oscillator reservoir computer. Neurocomputing, 652:131158, 2025
work page 2025
-
[15]
Kenneth AW Hoffmann, Tony G Chen, Mark R Cutkosky, and David Lentink. Bird-inspired robotics principles as a framework for developing smart aerospace materials.Journal of Composite Materials, 57(4):679–710, 2023
work page 2023
-
[16]
Reservoir computing beyond memory- nonlinearity trade-off.Scientific reports, 7(1):10199, 2017
Masanobu Inubushi and Kazuyuki Yoshimura. Reservoir computing beyond memory- nonlinearity trade-off.Scientific reports, 7(1):10199, 2017
work page 2017
-
[17]
Short term memory in echo state networks
Herbert Jaeger. Short term memory in echo state networks. 2001
work page 2001
-
[18]
Herbert Jaeger and Harald Haas. Harnessing nonlinearity: Predicting chaotic systems and saving energy in wireless communication.sci- ence, 304(5667):78–80, 2004
work page 2004
-
[19]
Soft robotics: a bioinspired evolu- tion in robotics.Trends in Biotechnology, 2013
Sangbae Kim. Soft robotics: a bioinspired evolu- tion in robotics.Trends in Biotechnology, 2013
work page 2013
-
[20]
Steven Kiyabu, Daniel Nelson, John Thomson, Benjamin Schultz, Timothy Vincent, Nathan Hertlein, Andrew Gillman, Amanda Criner, and Philip R Buskohl. Optomechanical reservoir computing.Proceedings of the National Academy of Sciences, 122(29):e2424991122, 2025
work page 2025
-
[21]
Perspectives on intelligence in soft robotics.Advanced Intelligent Systems, 7(1):2400294, 2025
Vera Gesina Kortman, Barbara Mazzolai, Aime´ e Sakes, and Jovana Jovanova. Perspectives on intelligence in soft robotics.Advanced Intelligent Systems, 7(1):2400294, 2025
work page 2025
-
[22]
Ryan H Lee, Erwin AB Mulder, and Jonathan B Hopkins. Mechanical neural networks: Archi- tected materials that learn behaviors.Science Robotics, 7(71):eabq7278, 2022
work page 2022
-
[23]
Physical reservoir computing with emerging electronics
Xiangpeng Liang, Jianshi Tang, Yanan Zhong, Bin Gao, He Qian, and Huaqiang Wu. Physical reservoir computing with emerging electronics. Nature Electronics, 7(3):193–206, 2024
work page 2024
-
[24]
Y. Ma. A review of smart materials for morphing structures.Composite Structures, 2019
work page 2019
-
[25]
Rectifier nonlinearities improve neural net- work acoustic models
Andrew L Maas, Awni Y Hannun, Andrew Y Ng, et al. Rectifier nonlinearities improve neural net- work acoustic models. InProc. icml, volume 30, page 3. Atlanta, GA, 2013
work page 2013
-
[26]
Wolfgang Maass, Thomas Natschl¨ ager, and Henry Markram. Real-time computing without stable states: A new framework for neural com- putation based on perturbations.Neural compu- tation, 14(11):2531–2560, 2002
work page 2002
-
[27]
Md Najmul Mowla, Davood Asadi, Tahir Durhasan, Javad Rashid Jafari, and Moham- madreza Amoozgar. Recent advancements in morphing applications: Architecture, artificial intelligence integration, challenges, and future trends-a comprehensive survey.Aerospace Sci- ence and Technology, 161:110102, 2025
work page 2025
-
[28]
Kohei Nakajima. Physical reservoir comput- ing—an introductory perspective.Japanese Journal of Applied Physics, 59(6):060501, 2020
work page 2020
-
[29]
Kohei Nakajima, Helmut Hauser, Rongjie Kang, Emanuele Guglielmino, Darwin G Caldwell, and Rolf Pfeifer. A soft body as a reservoir: case studies in a dynamic model of octopus-inspired 16 soft robotic arm.Frontiers in computational neuroscience, 7:91, 2013
work page 2013
-
[30]
Spectral analysis of mechan- ical reservoir computing with relu spring net- works
Daniel Nelson, Steven Kiyabu, Timothy Vin- cent, Andrew Gillman, Amanda Criner, and Philip R Buskohl. Spectral analysis of mechan- ical reservoir computing with relu spring net- works. InSmart Materials, Adaptive Structures and Intelligent Systems, volume 88322, page V001T08A004. American Society of Mechanical Engineers, 2024
work page 2024
-
[31]
Recent advances in reservoir comput- ing with a focus on electronic reservoirs
Fabiha Nowshin, Yuhao Zhang, Lingjia Liu, and Yang Yi. Recent advances in reservoir comput- ing with a focus on electronic reservoirs. In2020 11th International Green and Sustainable Com- puting Workshops (IGSC), pages 1–8. IEEE, 2020
work page 2020
-
[32]
Ryan Poon and Jonathan B Hopkins. Phase- changing metamaterial capable of variable stiff- ness and shape morphing.Advanced Engineering Materials, 21(12):1900802, 2019
work page 2019
-
[33]
Mushegh Rafayelyan, Jonathan Dong, Yongqi Tan, Florent Krzakala, and Sylvain Gigan. Large-scale optical reservoir computing for spa- tiotemporal chaotic systems prediction.Physical Review X, 10(4):041037, 2020
work page 2020
-
[34]
Jordan R Raney, Neel Nadkarni, Chiara Daraio, Dennis M Kochmann, Jennifer A Lewis, and Katia Bertoldi. Stable propagation of mechani- cal signals in soft media using stored elastic en- ergy.Proceedings of the National Academy of Sciences, 113(35):9722–9727, 2016
work page 2016
-
[35]
Design, fabri- cation and control of soft robots.Nature, 2015
Daniela Rus and Michael Tolley. Design, fabri- cation and control of soft robots.Nature, 2015
work page 2015
-
[36]
Recent advances in physical reser- voir computing: A review.Neural Networks, 115:100–123, 2019
Gouhei Tanaka, Toshiyuki Yamane, Jean Benoit H´ eroux, Ryosho Nakane, Naoki Kanazawa, Seiji Takeda, Hidetoshi Numata, Daiju Nakano, and Akira Hirose. Recent advances in physical reser- voir computing: A review.Neural Networks, 115:100–123, 2019
work page 2019
-
[37]
Bret W Tobalske. Biomechanics of bird flight. Journal of Experimental Biology, 210(18):3135– 3146, 2007
work page 2007
-
[38]
Information processing dynamics with perturbed cylinder-flap fluid-structure interac- tions
Timothy Vincent, David M Boston, Steven Kiyabu, Alexander M Pankonien, and Philip Buskohl. Information processing dynamics with perturbed cylinder-flap fluid-structure interac- tions. InAIAA SCITECH 2026 Forum, page 0900, 2026
work page 2026
-
[39]
Timothy Vincent and Alex Pankonien. Fluid- based reservoir computing for distributed signal processing.Journal of Intelligent Material Sys- tems and Structures, 36(18-19):1297–1300, 2025
work page 2025
-
[40]
Yanmei Wang, Yanen Wang, Ray Tahir Mush- taq, and Qinghua Wei. Advancements in soft robotics: a comprehensive review on actuation methods, materials, and applications.Polymers, 16(8):1087, 2024
work page 2024
-
[41]
Yuhang Wang, Lifeng Wang, and Yuqiang Gao. Metamaterial beam with resonators of ac- tive feedback control to broaden and tune the bandgaps.Acta Mechanica, 236(3):2331–2343, 2025
work page 2025
-
[42]
Mechan- ical computing.Nature, 598(7879):39–48, 2021
Hiromi Yasuda, Philip R Buskohl, Andrew Gillman, Todd D Murphey, Susan Stepney, Richard A Vaia, and Jordan R Raney. Mechan- ical computing.Nature, 598(7879):39–48, 2021
work page 2021
-
[43]
Yuning Zhang, Aditya Deshmukh, and Kon-Well Wang. Embodying multifunctional mechano- intelligence in and through phononic metastruc- tures harnessing physical reservoir computing. Advanced Science, 10(34):2305074, 2023
work page 2023
-
[44]
Harnessing physical reservoir computing in nonlinear me- chanical metastructures
Yuning Zhang and Kon-Well Wang. Harnessing physical reservoir computing in nonlinear me- chanical metastructures. InAIAA Scitech 2022 Forum, page 1464, 2022. 17 Supporting Information: Embodying Intelligence into Mechanical Metamaterials via Reservoir Computing Finite Element Model of Metamaterial Unit Cells The finite element analysis (FEA) of the ReLU b...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.