Manipulider: A Multi-Engine Buoyancy-Controlled Robot for Thrusterless Underwater Gliding and Manipulation
Pith reviewed 2026-06-26 14:33 UTC · model grok-4.3
The pith
Four syringe buoyancy engines let an underwater robot glide and hold large tilts without any thrusters by balancing net force and center of buoyancy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
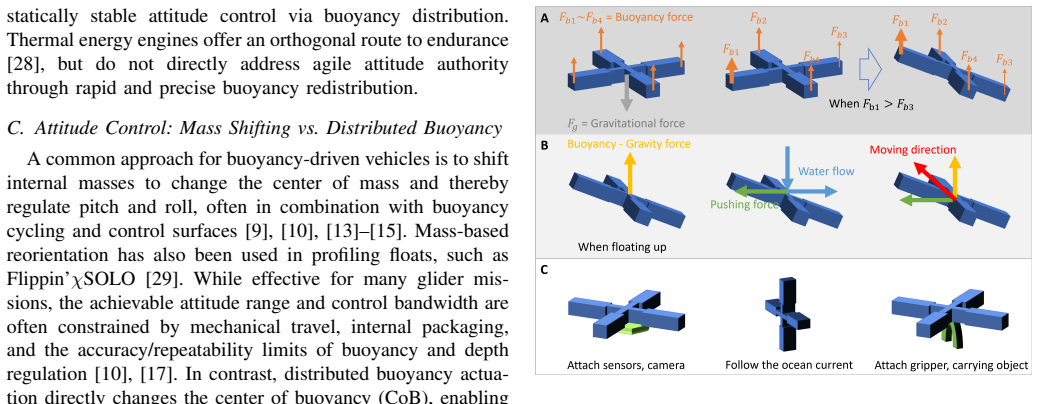
Four distributed syringe buoyancy engines allow independent regulation of local buoyancy volumes, which in combination set both the net buoyant force and the center of buoyancy location. This permits the robot to achieve statically stable large tilt angles without propulsion, supporting thrusterless gliding locomotion and attitude-controlled manipulation while using a magnetic modular interface for payload attachment.
What carries the argument
Four syringe-based buoyancy engines distributed around the body that jointly regulate net buoyancy and the center of buoyancy through static force balance.
If this is right
- The vehicle can execute controlled ascent and descent by changing only net buoyancy.
- Tilt regulation and transitions between attitudes are possible without any thruster input.
- Payload transport sequences can be performed using the attached gripper in a completely thrusterless manner.
- Propeller entanglement risks are eliminated during manipulation because no rotating thrusters are required.
Where Pith is reading between the lines
- The distributed-engine layout could be adapted to other buoyancy-driven platforms that need both vertical translation and orientation control.
- The magnetic interface implies that field teams could swap sensors or tools between dives without redesigning the core vehicle.
- Stability claims would require additional trials that include external flow or variable payload mass before deployment in open water.
Load-bearing premise
The syringe engines can produce repeatable volume changes large enough to maintain static equilibrium under external disturbances such as currents or payload shifts.
What would settle it
A direct test in which the robot is commanded to hold a large tilt while exposed to measurable water currents or a shifting payload; loss of the commanded angle would falsify the claim that static balance alone is sufficient.
Figures





read the original abstract
The Manipulider is a buoyancy-actuated underwater robot that enables thrusterless, glide-like locomotion and attitude-based manipulation, while providing a magnetic modular interface for rapid payload swapping (e.g., a gripper or sensors). Four syringe-based buoyancy engines distributed around the body jointly regulate net buoyancy and the center of buoyancy, allowing the vehicle to maintain large tilt angles through static force balance without continuous thrust and to avoid propeller entanglement risks. We present the mechanical and electrical design, calibration procedure, and control architecture. Experiments with a gripper attached (no external payload) show a controllable buoyancy-displacement range of 40 mL per engine ({\approx}160 g total buoyancy authority), maximum statically stable tilts of 64.6{\deg} (single-engine) and 61.8{\deg} (dual-engine), and representative vertical and tilt-transition dynamics. We further demonstrate tilt regulation, controlled ascent/descent primitives, and a proof-of-concept gripper-based payload-transport sequence without thrusters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents the Manipulider, a buoyancy-actuated underwater robot employing four syringe-based engines to jointly control net buoyancy and center of buoyancy. This enables thrusterless gliding locomotion and attitude-based manipulation via static force balance, supporting large stable tilts without continuous thrust. The work details the mechanical/electrical design, calibration procedure, and control architecture, with experiments (gripper attached, no external payload) reporting a 40 mL per-engine displacement range (~160 g total authority), maximum tilts of 64.6° (single-engine) and 61.8° (dual-engine), vertical/tilt dynamics, tilt regulation, ascent/descent primitives, and a proof-of-concept payload-transport sequence.
Significance. If the reported performance holds under further scrutiny, the design offers a practical alternative to thruster-based systems for underwater tasks, reducing entanglement risks and enabling energy-efficient static attitude control. The explicit reporting of calibration steps and concrete experimental metrics (displacement range and achieved tilts) strengthens the contribution as a hardware prototype suitable for replication or extension in robotics applications.
major comments (2)
- [Abstract] Abstract: the stated experimental outcomes (40 mL range, 64.6° and 61.8° tilts, gripper sequence) supply no error bars, sample sizes, number of trials, or statistical measures, preventing verification of repeatability for the central static-force-balance claim.
- [Experiments] Experiments section: no disturbance-rejection tests (currents, payload shifts, or external forces) are reported despite the claim of stable large tilts via static balance; this directly bears on whether the mechanism remains reliable outside controlled conditions.
minor comments (1)
- [Abstract] Abstract: LaTeX artifacts such as {\approx} and {\deg} should be rendered as proper symbols in the published version.
Simulated Author's Rebuttal
Thank you for the constructive feedback on our manuscript. We address each major comment below with proposed revisions to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract: the stated experimental outcomes (40 mL range, 64.6° and 61.8° tilts, gripper sequence) supply no error bars, sample sizes, number of trials, or statistical measures, preventing verification of repeatability for the central static-force-balance claim.
Authors: We agree that the abstract would be strengthened by including details on experimental repeatability. The reported values derive from repeated trials in the experiments section. In revision, we will update the abstract to specify the number of trials and indicate that the maximum tilts represent consistent outcomes across those trials, enabling better verification of the static balance results. revision: yes
-
Referee: [Experiments] Experiments section: no disturbance-rejection tests (currents, payload shifts, or external forces) are reported despite the claim of stable large tilts via static balance; this directly bears on whether the mechanism remains reliable outside controlled conditions.
Authors: The referee is correct that our validation occurred in a controlled laboratory tank without external disturbances. The work prioritizes demonstrating static force balance and basic primitives under these conditions. We will revise the experiments section to explicitly acknowledge the absence of disturbance tests as a limitation and outline future work on robustness, without claiming broader reliability. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper is a hardware prototype description focused on mechanical design, calibration, control architecture, and direct experimental measurements of buoyancy displacement and achieved tilt angles. No mathematical derivations, fitted predictions, self-referential equations, or load-bearing self-citations appear in the abstract or described content. All central claims rest on reported experimental outcomes rather than any reduction to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Net buoyancy and center of buoyancy can be treated as independently controllable variables via four distributed syringe engines.
Reference graph
Works this paper leans on
-
[1]
Soft Robots for Ocean Exploration and Offshore Operations: A Perspective,
S. Aracri, F. Giorgio-Serchi, G. Suaria, M. E. Sayed, M. P. Nemitz, S. Mahon, and A. A. Stokes, “Soft Robots for Ocean Exploration and Offshore Operations: A Perspective,”Soft Robotics, vol. 8, no. 6, pp. 625–639, Dec 2021
2021
-
[2]
Bioinspired soft robots for deep-sea exploration,
G. Li, T.-W. Wong, B. Shih, C. Guo, L. Wang, J. Liu, T. Wang, X. Liu, J. Yan, B. Wu, F. Yu, Y . Chen, Y . Liang, Y . Xue, C. Wang, S. He, L. Wen, M. T. Tolley, A.-M. Zhang, C. Laschi, and T. Li, “Bioinspired soft robots for deep-sea exploration,”Nature Communications, vol. 14, no. 1, p. 7097, Nov 2023
2023
-
[3]
Recent Advances on Underwater Soft Robots,
J. Qu, Y . Xu, Z. Li, Z. Yu, B. Mao, Y . Wang, Z. Wang, Q. Fan, X. Qian, M. Zhang, M. Xu, B. Liang, H. Liu, X. Wang, X. Wang, and T. Li, “Recent Advances on Underwater Soft Robots,”Advanced Intelligent Systems, p. 2300299, Oct 2023
2023
-
[4]
Reefglider: A highly maneuverable vectored buoyancy engine based underwater robot,
K. Macauley, L. Cai, P. Adamczyk, and Y . Girdhar, “Reefglider: A highly maneuverable vectored buoyancy engine based underwater robot,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 6082–6088
2024
-
[5]
Experimental assessment of entanglement for a propeller driven unmanned underwater vehicle,
K. E. Irgens, J. T. Klamo, and A. G. Pollman, “Experimental assessment of entanglement for a propeller driven unmanned underwater vehicle,” Naval Engineers Journal, vol. 133, no. 3, pp. 103–114, 2021
2021
-
[6]
Developing an un- derwater glider for educational purposes,
B. Mitchell, E. Wilkening, and N. Mahmoudian, “Developing an un- derwater glider for educational purposes,” in2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, May 2013, pp. 3423–3428
2013
-
[7]
Design of a Low-Cost Open-Source Underwater Glider,
A. Williams, “Design of a Low-Cost Open-Source Underwater Glider,” Engineering Archive, Tech. Rep., Apr 2018, type: article
2018
-
[8]
Soft Fluidic Closed-Loop Con- troller for Untethered Underwater Gliders,
K. Bonofiglio, L. Whiteside, M. Angeles, M. Haahr, B. Simpson, J. Palmer, Y . Wu, and M. P. Nemitz, “Soft Fluidic Closed-Loop Con- troller for Untethered Underwater Gliders,” in2023 IEEE International Conference on Soft Robotics (RoboSoft). Singapore, Singapore: IEEE, Apr 2023, pp. 1–6
2023
-
[9]
Model-based feedback control of autonomous underwater gliders,
N. E. Leonard and J. G. Graver, “Model-based feedback control of autonomous underwater gliders,”IEEE Journal of Oceanic Engineering, vol. 26, no. 4, pp. 633–645, 2001
2001
-
[10]
Underwater gliders: Dynamics, con- trol and design,
J. G. Graver, “Underwater gliders: Dynamics, con- trol and design,” Ph.D. dissertation, Princeton Univer- sity, 2005. [Online]. Available: https://naomi.princeton.edu/wp- content/uploads/sites/744/2021/03/jggraver-thesis-4-11-05.pdf
2005
-
[11]
Autonomous underwater glider: A comprehensive review,
E. Petritoli, F. Leccese, and M. Cagnetti, “Autonomous underwater glider: A comprehensive review,”Drones, vol. 9, no. 1, p. 21, 2024
2024
-
[12]
An optimization method for control parameters of underwater gliders considering energy consump- tion and motion accuracy,
H. Wu, W. Niu, S. Wang, and S. Yan, “An optimization method for control parameters of underwater gliders considering energy consump- tion and motion accuracy,”Applied Mathematical Modelling, vol. 90, pp. 1099–1119, 2021
2021
-
[13]
Seaglider: a long- range autonomous underwater vehicle for oceanographic research,
C. C. Eriksen, T. J. Osse, R. D. Light, T. Wen, T. W. Lehman, P. L. Sabin, J. W. Ballard, and A. M. Chiodi, “Seaglider: a long- range autonomous underwater vehicle for oceanographic research,”IEEE Journal of Oceanic Engineering, vol. 26, no. 4, pp. 424–436, 2001
2001
-
[14]
The autonomous underwater glider ‘spray’,
J. Sherman, R. E. Davis, W. B. Owens, and J. Valdes, “The autonomous underwater glider ‘spray’,”IEEE Journal of Oceanic Engineering, vol. 26, no. 4, pp. 437–446, 2001
2001
-
[15]
Slocum: an underwater glider propelled by environmental energy,
D. C. Webb, P. J. Simonetti, and C. P. Jones, “Slocum: an underwater glider propelled by environmental energy,”IEEE Journal of Oceanic Engineering, vol. 26, no. 4, pp. 447–452, 2001
2001
-
[16]
Underwater gliders for ocean research,
D. L. Rudnick, R. E. Davis, C. C. Eriksen, D. M. Fratantoni, and M. J. Perry, “Underwater gliders for ocean research,”Marine Technology Society Journal, vol. 38, no. 2, pp. 73–84, 2004
2004
-
[17]
High accuracy buoyancy for underwater gliders: The uncertainty in the depth control,
E. Petritoli, F. Leccese, and M. Cagnetti, “High accuracy buoyancy for underwater gliders: The uncertainty in the depth control,”Sensors, vol. 19, no. 8, p. 1831, 2019
2019
-
[18]
Hybrid actuation with comple- mentary allocation for depth control of a Lagrangian sea-floor imaging platform,
W. Snyder, C. Roman, and S. Licht, “Hybrid actuation with comple- mentary allocation for depth control of a Lagrangian sea-floor imaging platform,”Journal of Field Robotics, vol. 35, no. 3, pp. 330–344, 2018
2018
-
[19]
Under- water robot with a buoyancy control system based on the spermaceti oil hypothesis,
K. Shibuya, Y . Kado, S. Honda, T. Iwamoto, and K. Tsutsumi, “Under- water robot with a buoyancy control system based on the spermaceti oil hypothesis,” in2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, Oct 2006, pp. 3012–3017
2006
-
[20]
Design of a small sized self-powered robot for monitoring the ocean water column,
F. Fornai, G. Ferri, B. Mazzolai, and C. Laschi, “Design of a small sized self-powered robot for monitoring the ocean water column,” in 2013 MTS/IEEE OCEANS - Bergen. Bergen: IEEE, Jun 2013, pp. 1–6
2013
-
[21]
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dy- namic Payloads,
C. Detweiler, S. Sosnowski, I. Vasilescu, and D. Rus, “Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dy- namic Payloads,” inExperimental Robotics, B. Siciliano, O. Khatib, F. Groen, O. Khatib, V . Kumar, and G. J. Pappas, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2009, vol. 54, pp. 429–438, series Title: Springer Tr...
2009
-
[22]
Amour v: A hovering energy efficient under- water robot capable of dynamic payloads,
I. Vasilescu, C. Detweiler, M. Doniec, D. Gurdan, S. Sosnowski, J. Stumpf, and D. Rus, “Amour v: A hovering energy efficient under- water robot capable of dynamic payloads,”The International Journal of Robotics Research, vol. 29, no. 5, pp. 547–570, 2010
2010
-
[23]
Design and experimental tests of a buoyancy change module for autonomous underwater vehicles,
J. Falc ˜ao Carneiro, J. Bravo Pinto, F. Gomes de Almeida, and N. A. Cruz, “Design and experimental tests of a buoyancy change module for autonomous underwater vehicles,”Actuators, vol. 11, no. 9, p. 254, 2022
2022
-
[24]
Electrohydraulic and electromechanical buoyancy change device unified vertical motion model,
J. Falc ˜ao Carneiro, J. B. Pinto, F. Gomes de Almeida, and N. A. Cruz, “Electrohydraulic and electromechanical buoyancy change device unified vertical motion model,” inActuators, vol. 12, no. 10. MDPI, 2023, p. 380
2023
-
[25]
Depth control of an underwater sensor platform: Comparison between variable buoyancy and propeller actuated devices,
J. F. Carneiro, J. B. Pinto, F. G. de Almeida, and N. A. Cruz, “Depth control of an underwater sensor platform: Comparison between variable buoyancy and propeller actuated devices,”Sensors, vol. 24, no. 10, p. 3050, 2024
2024
-
[26]
Design and analysis of a variable buoyancy system for efficient hovering control of underwater vehicles with state feedback controller,
B. K. Tiwari and R. Sharma, “Design and analysis of a variable buoyancy system for efficient hovering control of underwater vehicles with state feedback controller,”Journal of Marine Science and Engineering, vol. 8, no. 4, p. 263, 2020
2020
-
[27]
Design and testing of a miniature variable buoyancy system for underwater vehicles,
M. Elkolali, “Design and testing of a miniature variable buoyancy system for underwater vehicles,” Master’s thesis, Oslo Metropolitan University (OsloMet), 2022
2022
-
[28]
A thermal engine for underwater glider driven by ocean thermal energy,
Y . Yang, Y . Wang, Z. Ma, and S. Wang, “A thermal engine for underwater glider driven by ocean thermal energy,”Applied Thermal Engineering, vol. 99, pp. 455–464, 2016
2016
-
[29]
Flippin’χSOLO, an upper-ocean autonomous turbulence-profiling float,
J. N. Moumet al., “Flippin’χSOLO, an upper-ocean autonomous turbulence-profiling float,”Journal of Atmospheric and Oceanic Tech- nology, vol. 40, no. 5, pp. 629–644, 2023
2023
-
[30]
Design and development of modular magnetic bio-inspired autonomous underwater robot – MMBAUV,
M. Wright, Q. Xiao, S. Dai, M. Post, H. Yue, and B. Sarkar, “Design and development of modular magnetic bio-inspired autonomous underwater robot – MMBAUV,”Ocean Engineering, vol. 273, p. 113968, Apr 2023
2023
-
[31]
Towards docking for small scale underwater robots,
S. Mintchev, R. Ranzani, F. Fabiani, and C. Stefanini, “Towards docking for small scale underwater robots,”Autonomous Robots, vol. 38, no. 3, pp. 283–299, Mar 2015
2015
-
[32]
Underwater Mobile Manipulation: A Soft Arm on a Benthic Legged Robot,
J. Liu, S. Iacoponi, C. Laschi, L. Wen, and M. Calisti, “Underwater Mobile Manipulation: A Soft Arm on a Benthic Legged Robot,”IEEE Robotics & Automation Magazine, vol. 27, no. 4, pp. 12–26, Dec 2020
2020
-
[33]
Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing,
M. Wu, X. Zheng, R. Liu, N. Hou, W. H. Afridi, R. H. Afridi, X. Guo, J. Wu, C. Wang, and G. Xie, “Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing,”Advanced Science, vol. 9, no. 17, p. 2104382, Jun 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.