Whole-Body Inverse Kinematics with Graph Diffusion
Pith reviewed 2026-06-30 13:39 UTC · model grok-4.3
The pith
Modeling robots as kinematic graphs and running conditional graph diffusion on them solves inverse kinematics for single-arm, dual-arm, and whole-body systems while producing multiple valid solutions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Formulating inverse kinematics as a conditional graph diffusion process on a kinematic graph constructed from URDF, augmented by hierarchical stage-wise message passing and torso-aware conditioning, yields a unified framework that supports single-arm, dual-arm, and multi-branch articulated robots while producing accurate solutions and multiple feasible configurations for redundant systems.
What carries the argument
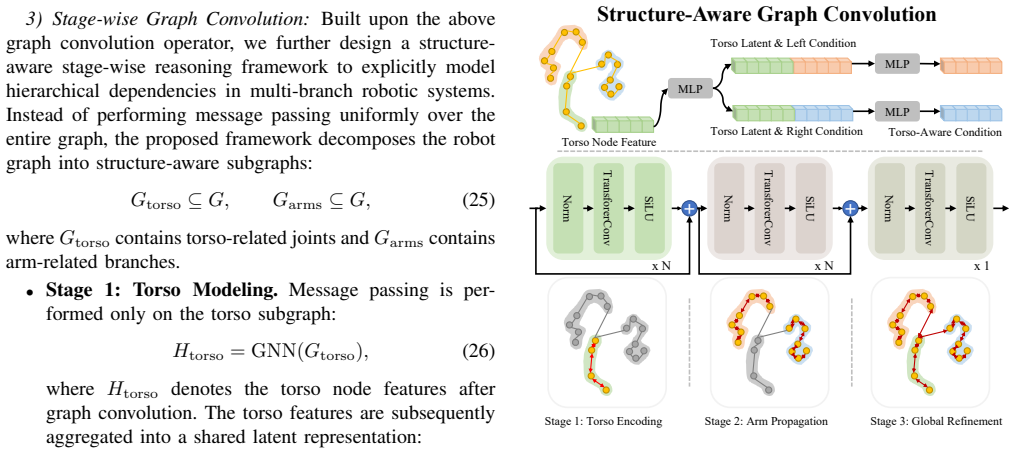
Kinematic graph built from URDF with conditional graph diffusion and hierarchical stage-wise message passing plus torso-aware conditioning.
If this is right
- A single trained model produces IK solutions for single-arm, dual-arm, and torso-equipped robots.
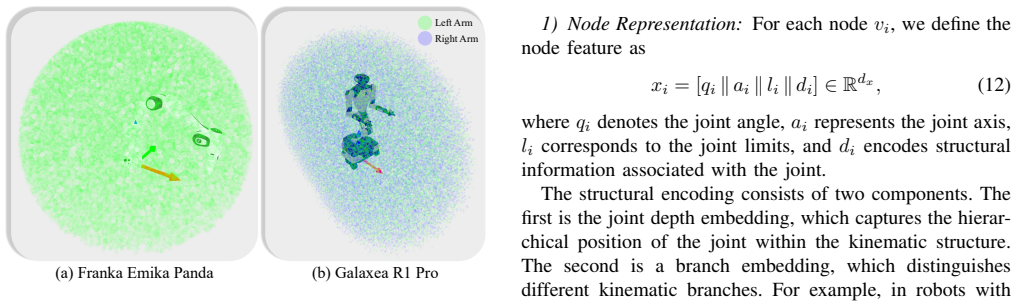
- The diffusion process yields multiple distinct yet valid joint configurations when the robot is redundant.
- Noisy forward-kinematics feedback during denoising improves geometric accuracy of the generated poses.
- Task-space supervision keeps the solutions aligned with the commanded end-effector targets.
Where Pith is reading between the lines
- Swapping the URDF input could let the same model adapt to new robot designs without retraining from scratch.
- Sampling multiple modes from the diffusion process may help downstream planners choose among collision-free options.
- Faster sampling or model distillation would be needed before the method runs inside a real-time control loop.
- Adding obstacle or self-collision information as extra conditioning could turn the framework into a primitive motion planner.
Load-bearing premise
Representing the robot as a graph from its URDF and applying hierarchical message passing in a diffusion process will capture the structural dependencies and multi-modal character of inverse kinematics across different robot shapes.
What would settle it
Generate samples for a dual-arm robot with torso, apply the resulting joint angles through forward kinematics, and check whether the end-effector errors remain below a few millimeters while the torso link stays within its joint limits.
Figures



read the original abstract
Inverse kinematics (IK) is a fundamental problem in robotics, requiring the generation of joint configurations that satisfy target end-effector poses. Existing approaches often struggle to generalize across diverse robot morphologies and to effectively model the multi-modal nature of IK, particularly in articulated systems with multiple kinematic branches. In this work, we propose GraphDiff-IK, a structure-aware graph diffusion framework for inverse kinematics. Specifically, we represent the robot as a kinematic graph constructed from the robot URDF, where nodes correspond to actuated joints and edges encode kinematic dependencies. Building upon this representation, we formulate IK as a conditional graph diffusion process that directly generates joint configurations on the robot graph. To better capture structural dependencies in articulated systems, we further introduce a structure-aware graph reasoning framework with hierarchical stage-wise message passing and torso-aware conditioning for multi-branch robots. In addition, we incorporate noisy forward kinematics feedback and task-space supervision to improve geometric consistency during denoising. The proposed framework provides a unified formulation that naturally supports single-arm robots, dual-arm systems, and articulated robots with torso or waist structures. Extensive experiments on diverse robotic platforms demonstrate that the proposed method achieves accurate and stable IK performance while preserving the ability to generate multiple feasible solutions for redundant robotic systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes GraphDiff-IK, a structure-aware graph diffusion framework for whole-body inverse kinematics. Robots are represented as kinematic graphs derived from URDF (nodes as actuated joints, edges as kinematic dependencies); IK is cast as a conditional graph diffusion process that generates joint configurations. The method adds hierarchical stage-wise message passing, torso-aware conditioning for multi-branch systems, and auxiliary losses from noisy forward kinematics plus task-space supervision. It claims a unified formulation supporting single-arm, dual-arm, and torso/waist robots, with experiments on diverse platforms showing accurate, stable performance and the ability to produce multiple feasible solutions for redundant manipulators.
Significance. If the empirical claims hold, the work supplies a unified, morphology-agnostic approach to multi-modal IK that directly exploits graph structure and diffusion to address generalization and solution diversity—two persistent challenges for articulated systems. The graph representation and conditioning mechanisms are a natural fit for the problem and could reduce the need for morphology-specific engineering.
major comments (2)
- [Abstract / Experiments] The abstract asserts that 'extensive experiments on diverse robotic platforms demonstrate that the proposed method achieves accurate and stable IK performance,' yet supplies no quantitative metrics, baselines, success-rate tables, or ablation results. Without these data the central empirical claim cannot be evaluated.
- [Method] The description of hierarchical stage-wise message passing and torso-aware conditioning is given at a conceptual level only; no equations, layer definitions, or conditioning mechanism details are provided, preventing assessment of whether the architecture actually captures the claimed structural dependencies.
minor comments (1)
- [Method] Notation for the graph diffusion process (e.g., forward/reverse schedules, conditioning variables) should be introduced with explicit symbols and a short algorithmic outline.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the manuscript to strengthen the presentation of results and technical details.
read point-by-point responses
-
Referee: [Abstract / Experiments] The abstract asserts that 'extensive experiments on diverse robotic platforms demonstrate that the proposed method achieves accurate and stable IK performance,' yet supplies no quantitative metrics, baselines, success-rate tables, or ablation results. Without these data the central empirical claim cannot be evaluated.
Authors: We agree that the abstract's empirical claim requires supporting quantitative evidence to be properly evaluated. The manuscript's experiments section presents results on multiple platforms, but we acknowledge the absence of consolidated metrics, baselines, and ablations in a form that directly substantiates the abstract. We will revise by adding a concise summary of key metrics (e.g., position/orientation errors and success rates) to the abstract and by ensuring prominent tables for baselines, success rates, and ablations appear in the experiments section. revision: yes
-
Referee: [Method] The description of hierarchical stage-wise message passing and torso-aware conditioning is given at a conceptual level only; no equations, layer definitions, or conditioning mechanism details are provided, preventing assessment of whether the architecture actually captures the claimed structural dependencies.
Authors: We appreciate this observation. The method section currently describes the hierarchical stage-wise message passing and torso-aware conditioning at a conceptual level. We will expand this section in the revision to include the explicit equations for the message-passing updates, the layer definitions, and the precise formulation of the torso-aware conditioning mechanism. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided abstract and description outline a construction for GraphDiff-IK: a URDF-derived kinematic graph, formulated as a conditional graph diffusion process with hierarchical stage-wise message passing, torso-aware conditioning, and auxiliary noisy FK/task-space losses. No equations, derivations, or parameter-fitting steps are shown that would allow any claimed result to reduce to its inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked in a load-bearing way. The unified support for different robot morphologies follows directly from the graph representation itself, with no evidence of circular reduction in the stated components.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Siciliano, L
B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo,Robotics: mod- elling, planning and control. Springer, 2009
2009
-
[2]
Introduction to robotics: Mechanics and control,
F. Merat, “Introduction to robotics: Mechanics and control,”IEEE Journal on Robotics and Automation, vol. 3, no. 2, pp. 166–166, 1987
1987
-
[3]
M. W. Spong, S. Hutchinson, and M. Vidyasagar,Robot modeling and control. Wiley New York, 2020, vol. 2
2020
-
[4]
S. M. LaValle,Planning algorithms. Cambridge university press, 2006
2006
-
[5]
Learning fine-grained bimanual manipulation with low-cost hardware,
Y . Zhanget al., “Learning fine-grained bimanual manipulation with low-cost hardware,” inProceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[6]
Unitree g1 humanoid robot,
Unitree Robotics, “Unitree g1 humanoid robot,” 2024, available: https://www.unitree.com/g1
2024
-
[7]
C. Li, R. Zhang, J. Wong, C. Gokmen, S. Srivastava, R. Mart ´ın-Mart´ın, C. Wang, G. Levine, W. Ai, B. Martinez, H. Yin, M. Lingelbach, M. Hwang, A. Hiranaka, S. Garlanka, A. Aydin, S. Lee, J. Sun, M. Anvari, M. Sharma, D. Bansal, S. Hunter, K.-Y . Kim, A. Lou, C. R. Matthews, I. Villa-Renteria, J. H. Tang, C. Tang, F. Xia, Y . Li, S. Savarese, H. Gweon, ...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[8]
Inverse kinematics techniques in computer graphics: A survey,
A. Aristidou, J. Lasenby, Y . Chrysanthou, and A. Shamir, “Inverse kinematics techniques in computer graphics: A survey,” inComputer graphics forum, vol. 37, no. 6. Wiley Online Library, 2018, pp. 35–58
2018
-
[9]
Manipulator inverse kinematic solutions based on vector formulations and damped least-squares methods,
C. W. Wampler, “Manipulator inverse kinematic solutions based on vector formulations and damped least-squares methods,”IEEE Trans- actions on Systems, Man, and Cybernetics, vol. 16, no. 1, pp. 93–101, 1986
1986
-
[10]
Generative graphical inverse kinematics,
O. Limoyo, F. Mari ´c, M. Giamou, P. Alexson, I. Petrovi ´c, and J. Kelly, “Generative graphical inverse kinematics,”IEEE Transactions on Robotics, vol. 41, pp. 1002–1018, 2025
2025
-
[11]
Ikflow: Generating diverse inverse kinematics solutions,
B. Ames, J. Morgan, and G. Konidaris, “Ikflow: Generating diverse inverse kinematics solutions,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7177–7184, 2022
2022
-
[12]
Neural inverse kinematic,
R. Bensadoun, S. Gur, N. Blau, and L. Wolf, “Neural inverse kinematic,” inProceedings of the 39th International Conference on Machine Learning, ser. Proceedings of Machine Learning Research, K. Chaudhuri, S. Jegelka, L. Song, C. Szepesvari, G. Niu, and S. Sabato, Eds., vol. 162. PMLR, 17–23 Jul 2022, pp. 1787–1797. [Online]. Available: https://proceedings...
2022
-
[13]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,” inAdvances in Neural Information Processing Systems, H. Larochelle, M. Ranzato, R. Hadsell, M. Balcan, and H. Lin, Eds., vol. 33. Curran Associates, Inc., 2020, pp. 6840–6851
2020
-
[14]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,” in Proceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[15]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, L. u. Kaiser, and I. Polosukhin, “Attention is all you need,” in Advances in Neural Information Processing Systems, I. Guyon, U. V . Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett, Eds., vol. 30. Curran Associates, Inc., 2017
2017
-
[16]
Semi-Supervised Classification with Graph Convolutional Networks
T. N. Kipf and M. Welling, “Semi-supervised classification with graph convolutional networks,”arXiv preprint arXiv:1609.02907, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[17]
Learning representations by back-propagating errors,
D. E. Rumelhart, G. E. Hinton, and R. J. Williams, “Learning representations by back-propagating errors,”Nature, vol. 323, no. 6088, pp. 533–536, 1986
1986
-
[18]
J. J. Craig,Introduction to Robotics: Mechanics and Control. Pearson Prentice Hall, 2005
2005
-
[19]
D. L. Pieper,The kinematics of manipulators under computer control. Stanford University, 1969
1969
-
[20]
Inverse kinematic solutions with singularity robustness for robot manipulator control,
Y . Nakamura and H. Hanafusa, “Inverse kinematic solutions with singularity robustness for robot manipulator control,” 1986
1986
-
[21]
Introduction to inverse kinematics with jacobian transpose, pseudoinverse and damped least squares methods,
S. Buss, “Introduction to inverse kinematics with jacobian transpose, pseudoinverse and damped least squares methods,” 2004
2004
-
[22]
Manipulability of robotic mechanisms,
T. Yoshikawa, “Manipulability of robotic mechanisms,”The interna- tional journal of Robotics Research, vol. 4, no. 2, pp. 3–9, 1985
1985
-
[23]
Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators,
S. Chiaverini, “Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators,”IEEE Transac- tions on Robotics and Automation, vol. 13, no. 3, pp. 398–410, 2002
2002
-
[24]
Control of free-floating humanoid robots through task prioritization,
L. Sentis and O. Khatib, “Control of free-floating humanoid robots through task prioritization,” inProceedings of the 2005 IEEE Inter- national Conference on Robotics and Automation. IEEE, 2005, pp. 1718–1723
2005
-
[25]
A unified approach for motion and force control of robot manipulators: The operational space formulation,
O. Khatib, “A unified approach for motion and force control of robot manipulators: The operational space formulation,”IEEE Journal on Robotics and Automation, vol. 3, no. 1, pp. 43–53, 1987
1987
-
[26]
On solving the inverse kinematics problem using neural networks,
A. Csiszar, J. Eilers, and A. Verl, “On solving the inverse kinematics problem using neural networks,” in2017 24th International Con- ference on Mechatronics and Machine Vision in Practice (M2VIP). IEEE, 2017, pp. 1–6
2017
-
[27]
A deep learning approach to navigating the joint solution space of redundant inverse kinematics and its applications to numerical ik computations,
C.-K. Ho, L.-W. Chan, C.-T. King, and T.-Y . Yen, “A deep learning approach to navigating the joint solution space of redundant inverse kinematics and its applications to numerical ik computations,”IEEE Access, vol. 11, pp. 2274–2290, 2023
2023
-
[28]
Graph neural networks: A review of methods and applications,
J. Zhou, G. Cui, S. Hu, Z. Zhang, C. Yang, Z. Liu, L. Wang, C. Li, and M. Sun, “Graph neural networks: A review of methods and applications,”AI open, vol. 1, pp. 57–81, 2020
2020
-
[29]
Nervenet: Learning structured policy with graph neural networks,
T. Wang, R. Liao, J. Ba, and S. Fidler, “Nervenet: Learning structured policy with graph neural networks,” inInternational conference on learning representations, 2018
2018
-
[30]
Graph networks as learnable physics engines for inference and control,
A. Sanchez-Gonzalez, N. Heess, J. T. Springenberg, J. Merel, M. Ried- miller, R. Hadsell, and P. Battaglia, “Graph networks as learnable physics engines for inference and control,” inInternational conference on machine learning. PMLR, 2018, pp. 4470–4479
2018
-
[31]
Riemannian optimization for distance-geometric inverse kinematics,
F. Mari ´c, M. Giamou, A. W. Hall, S. Khoubyarian, I. Petrovi ´c, and J. Kelly, “Riemannian optimization for distance-geometric inverse kinematics,”IEEE Transactions on Robotics, vol. 38, no. 3, pp. 1703– 1722, 2022
2022
-
[32]
Instant policy: In-context imitation learning via graph diffusion,
V . V osylius and E. Johns, “Instant policy: In-context imitation learning via graph diffusion,” inProceedings of the International Conference on Learning Representations (ICLR), 2025
2025
-
[33]
Score-Based Generative Modeling through Stochastic Differential Equations
Y . Song, J. Sohl-Dickstein, D. P. Kingma, A. Kumar, S. Ermon, and B. Poole, “Score-based generative modeling through stochastic differential equations,”arXiv preprint arXiv:2011.13456, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[34]
Planning with Diffusion for Flexible Behavior Synthesis
M. Janner, Y . Du, J. B. Tenenbaum, and S. Levine, “Plan- ning with diffusion for flexible behavior synthesis,”arXiv preprint arXiv:2205.09991, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[35]
Diffusion models for robotic manipulation: A survey,
R. Wolf, Y . Shi, S. Liu, and R. Rayyes, “Diffusion models for robotic manipulation: A survey,”Frontiers in Robotics and AI, vol. 12, p. 1606247, 2025
2025
-
[36]
Motion planning diffusion: Learning and planning of robot motions with diffusion models,
J. Carvalho, A. T. Le, M. Baierl, D. Koert, and J. Peters, “Motion planning diffusion: Learning and planning of robot motions with diffusion models,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 1916–1923
2023
-
[37]
Motion planning diffusion: Learning and adapting robot motion planning with diffusion models,
J. Carvalho, A. T. Le, P. Kicki, D. Koert, and J. Peters, “Motion planning diffusion: Learning and adapting robot motion planning with diffusion models,”IEEE Transactions on Robotics, 2025
2025
-
[38]
Featherstone,Rigid Body Dynamics Algorithms
R. Featherstone,Rigid Body Dynamics Algorithms. New York, NY: Springer, 2008
2008
-
[39]
Film: Visual reasoning with a general conditioning layer,
E. Perez, F. Strub, H. de Vries, V . Dumoulin, and A. C. Courville, “Film: Visual reasoning with a general conditioning layer,” inAAAI, 2018
2018
-
[40]
On the continuity of rotation representations in neural networks,
Y . Zhou, C. Barnes, J. Lu, J. Yang, and H. Li, “On the continuity of rotation representations in neural networks,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 5745–5753
2019
-
[41]
Denoising diffusion implicit models,
J. Song, C. Meng, and S. Ermon, “Denoising diffusion implicit models,” inInternational Conference on Learning Representations (ICLR), 2021
2021
-
[42]
Paszke, S
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K ¨opf, E. Yang, Z. DeVito, M. Raison, A. Tejani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala,PyTorch: an imperative style, high- performance deep learning library. Red Hook, NY , USA: Curran Associates Inc., 2019
2019
-
[43]
Fast graph representation learning with PyTorch Geometric,
M. Fey and J. E. Lenssen, “Fast graph representation learning with PyTorch Geometric,” inICLR Workshop on Representation Learning on Graphs and Manifolds, 2019
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.