A minimax Bilinear Transport Problem and Nash-Monge-Kantorovich Maps
Pith reviewed 2026-07-02 10:10 UTC · model grok-4.3
The pith
A bilinear min-max transport problem from a zero-sum game reduces to a Nash equilibrium over couplings via an endpoint cost below a critical interaction strength, and yields Monge solutions in the quadratic case.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The equilibrium induces a finite-dimensional stationary problem via an endpoint cost on transport plans, which is well defined below a critical interaction strength and yields a Nash equilibrium over couplings. In the quadratic interaction case, we derive an explicit endpoint cost and a dual formulation. The resulting Nash-Monge-Kantorovich (NMK) plans admit Monge solutions, recovering classical structures in optimal transport, with optimal maps given by gradients of convex or concave functions when they exist.
What carries the argument
The endpoint cost on transport plans, which reduces the dynamic path-space formulation to a finite-dimensional stationary Nash problem over couplings.
If this is right
- The NMK plans admit Monge solutions.
- Optimal maps are given by gradients of convex or concave functions when they exist.
- The equilibrium maps are linked to coupled nonlinear PDEs.
- Classical structures of optimal transport are recovered for the nonstandard costs.
Where Pith is reading between the lines
- The reduction technique might apply to other interaction costs once an analogous endpoint functional can be identified.
- The link to Monge-Ampere-type equations suggests that numerical schemes for convex optimization could be used to compute the equilibrium maps.
- The framework connects zero-sum games on path space to mean-field-type limits, which could be examined by letting the number of players grow.
Load-bearing premise
The interaction strength must stay below a critical threshold so that the endpoint cost remains well-defined and the induced stationary problem yields a true Nash equilibrium.
What would settle it
A concrete counter-example in which the minimax value fails to equal the maximin value, or in which no Monge solution exists, once the interaction strength exceeds the stated threshold would falsify the reduction.
Figures
read the original abstract
We study a min-max bilinear transport problem arising from a two-player zero-sum game with quadratic kinetic and interaction costs. Starting from a dynamic path space formulation, we establish existence of minimax and maximin plans and prove a minimax theorem. We show that the equilibrium induces a finite-dimensional stationary problem via an endpoint cost on transport plans, which is well defined below a critical interaction strength and yields a Nash equilibrium over couplings. In the quadratic interaction case, we derive an explicit endpoint cost and a dual formulation. The resulting Nash-Monge-Kantorovich (NMK) plans admit Monge solutions, recovering classical structures in optimal transport, with optimal maps given by gradients of convex or concave functions when they exist. Our analysis highlights duality and cyclical (anti-)monotonicity for nonstandard costs and links the equilibrium maps to coupled nonlinear PDEs, bridging optimal transport, zero-sum games, and Monge-Ampere-type equations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies a min-max bilinear transport problem from a two-player zero-sum game with quadratic kinetic and interaction costs. Starting from a dynamic path-space formulation, it establishes existence of minimax and maximin plans and proves a minimax theorem. The equilibrium is shown to induce a finite-dimensional stationary problem via an endpoint cost on transport plans, well-defined below a critical interaction strength, yielding a Nash equilibrium over couplings. In the quadratic interaction case, an explicit endpoint cost and dual formulation are derived. The resulting Nash-Monge-Kantorovich (NMK) plans admit Monge solutions, recovering classical optimal transport structures with optimal maps as gradients of convex or concave functions when they exist. The analysis links the equilibrium maps to coupled nonlinear PDEs.
Significance. If the central claims hold, the work bridges optimal transport, zero-sum games, and Monge-Ampère-type equations by introducing NMK plans and showing how the dynamic minimax problem reduces to a stationary Nash problem below a critical threshold. The explicit quadratic case and recovery of Monge solutions with gradient maps are notable strengths, as is the emphasis on duality and cyclical (anti-)monotonicity for nonstandard costs.
major comments (1)
- [Abstract / equilibrium induction paragraph] The reduction from the dynamic path-space minimax formulation to the finite-dimensional stationary Nash problem (abstract, paragraph on equilibrium induction) is conditioned on the endpoint cost being well-defined below an unspecified critical interaction strength. No explicit expression for this threshold is given, nor is there verification that the minimax plans satisfy the Nash condition precisely when the cost remains defined. This assumption is load-bearing for all subsequent claims about the induced stationary problem, duality, and Monge solvability.
minor comments (1)
- The abstract refers to 'cyclical (anti-)monotonicity for nonstandard costs' without citing the relevant theorem or section where this is established.
Simulated Author's Rebuttal
We thank the referee for the detailed report and for identifying a load-bearing assumption in the reduction from the dynamic minimax problem to the stationary Nash problem. We address the concern directly below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract / equilibrium induction paragraph] The reduction from the dynamic path-space minimax formulation to the finite-dimensional stationary Nash problem (abstract, paragraph on equilibrium induction) is conditioned on the endpoint cost being well-defined below an unspecified critical interaction strength. No explicit expression for this threshold is given, nor is there verification that the minimax plans satisfy the Nash condition precisely when the cost remains defined. This assumption is load-bearing for all subsequent claims about the induced stationary problem, duality, and Monge solvability.
Authors: We agree that the critical interaction strength must be stated explicitly and that the verification linking minimax plans to the Nash condition (precisely when the endpoint cost is defined) should be highlighted. In the quadratic-interaction case the paper derives an explicit endpoint cost; the threshold arises as the value at which this cost ceases to be finite for all couplings. We will add the explicit formula for the threshold (in terms of the kinetic and interaction coefficients) to the abstract, the equilibrium-induction paragraph, and the relevant theorem statement. We will also insert a short lemma verifying that any minimax plan induces a Nash equilibrium over couplings if and only if the endpoint cost remains finite, with the proof relying on the already-established minimax theorem and the definition of the endpoint functional. These additions will be placed immediately after the existence result for minimax plans so that the reduction is fully justified before duality and Monge solvability are discussed. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided abstract and description show a derivation from dynamic path-space minimax to a stationary Nash problem via an endpoint cost that is conditioned on an external critical interaction strength threshold. This threshold is invoked as a hypothesis guaranteeing well-definedness and the reduction, not defined in terms of the resulting equilibrium or Nash plans. No self-citations, fitted parameters renamed as predictions, ansatzes smuggled via prior work, or self-definitional loops appear in the quoted material. The quadratic case derives an explicit endpoint cost and dual formulation from the interaction structure, recovering Monge solutions via standard OT arguments. The central claims rest on existence results external to the target quantities.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Existence of minimax and maximin plans in the dynamic path-space formulation
- domain assumption The endpoint cost is well-defined below a critical interaction strength
Reference graph
Works this paper leans on
-
[1]
A user’s guide to optimal transport.Modelling and Optimisation of Flows on Networks: Cetraro, Italy 2009, Editors: Benedetto Piccoli, Michel Rascle, pages 1–155, 2013
Luigi Ambrosio, Alberto Bressan, Dirk Helbing, Axel Klar, Enrique Zuazua, Luigi Ambrosio, and Nicola Gigli. A user’s guide to optimal transport.Modelling and Optimisation of Flows on Networks: Cetraro, Italy 2009, Editors: Benedetto Piccoli, Michel Rascle, pages 1–155, 2013
2009
-
[2]
Polar factorization and monotone rearrangement of vector-valued functions.Communications on pure and applied mathematics, 44(4):375–417, 1991
Yann Brenier. Polar factorization and monotone rearrangement of vector-valued functions.Communications on pure and applied mathematics, 44(4):375–417, 1991
1991
-
[3]
Springer, 2011
Haim Br´ ezis.Functional analysis, Sobolev spaces and partial differential equations. Springer, 2011
2011
-
[4]
An optimal transportation principle for interacting paths and congestion, 2022
Rene Cabrera. An optimal transportation principle for interacting paths and congestion, 2022
2022
-
[5]
PhD thesis, University of Mas- sachusetts Amherst, May 2022
Ren´ e Cabrera.An Optimal Transportation Theory for Interacting Paths. PhD thesis, University of Mas- sachusetts Amherst, May 2022. Ph.D. Dissertation, Department of Mathematics and Statistics
2022
-
[6]
Caffarelli
Luis A. Caffarelli. Some regularity properties of solutions of monge amp` ere equation.Communications on Pure and Applied Mathematics, 44(8-9):965–969, 1991
1991
-
[7]
Caffarelli
Luis A. Caffarelli. Boundary regularity of maps with convex potentials.Communications on Pure and Applied Mathematics, 45(9):1141–1151, 1992
1992
-
[8]
Caffarelli
Luis A. Caffarelli. The regularity of mappings with a convex potential.Journal of the American Mathematical Society, 5(1):99–104, 1992
1992
-
[9]
Caffarelli
Luis A. Caffarelli. Monotonicity properties of optimal transportation and the FKG and related inequalities. Comm. Math. Phys., 214(3):547–563, 2000
2000
-
[10]
W 2, 1 regularity for solutions of the monge–amp` ere equation
Guido De Philippis and Alessio Figalli. W 2, 1 regularity for solutions of the monge–amp` ere equation. Inventiones mathematicae, 192(1):55–69, 2013
2013
-
[11]
American mathematical society, 2022
Lawrence C Evans.Partial differential equations, volume 19. American mathematical society, 2022
2022
-
[12]
Fixed-point theorems for continuous mappings.Proceedings of the National Academy of Sciences, 38(2):121–126, 1952
Ky Fan. Fixed-point theorems for continuous mappings.Proceedings of the National Academy of Sciences, 38(2):121–126, 1952
1952
-
[13]
EMS Press, 2017
Alessio Figalli.The Monge-Amp` ere equation and its applications. EMS Press, 2017
2017
-
[14]
The geometry of optimal transportation.Acta Mathematica, 177(2):113–161, 1998
Wilfrid Gangbo and Robert J McCann. The geometry of optimal transportation.Acta Mathematica, 177(2):113–161, 1998
1998
-
[15]
A further generalization of the kakutani fixed point theorem, with application to nash equilibrium points.Proceedings of the American Mathematical Society, 3(1):170–174, 1952
Irving L Glicksberg. A further generalization of the kakutani fixed point theorem, with application to nash equilibrium points.Proceedings of the American Mathematical Society, 3(1):170–174, 1952
1952
-
[16]
John Wiley & Sons, New York, 1965
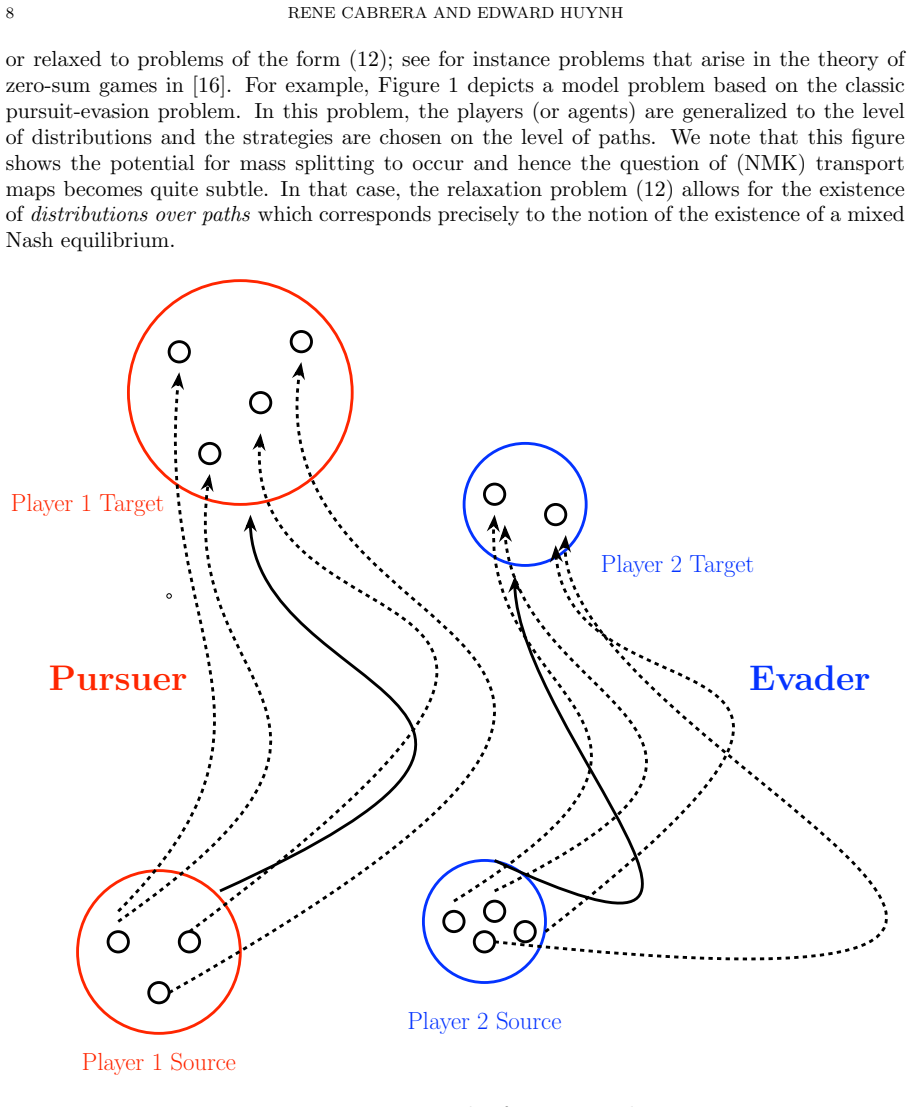
Rufus Isaacs.Differential Games: A Mathematical Theory with Applications to Warfare and Pursuit, Control and Optimization. John Wiley & Sons, New York, 1965
1965
-
[17]
Quadratic optimal transportation problem with a positive semi definite structure on the cost function, 2025
Seonghyeon Jeong. Quadratic optimal transportation problem with a positive semi definite structure on the cost function, 2025
2025
-
[18]
A generalization of brouwer’s fixed point theorem.Duke Mathematical Journal, 8(3):457– 459, 1941
Shizuo Kakutani. A generalization of brouwer’s fixed point theorem.Duke Mathematical Journal, 8(3):457– 459, 1941
1941
-
[19]
Elementary proof for sion’s minimax theorem.Kodai mathematical journal, 11(1):5–7, 1988
Hidetoshi Komiya. Elementary proof for sion’s minimax theorem.Kodai mathematical journal, 11(1):5–7, 1988. A MINIMAX BILINEAR TRANSPORT PROBLEM AND NASH-MONGE-KANTOROVICH MAPS 53
1988
-
[20]
I: Functional Analysis
Michael Reed and Barry Simon.Methods of Modern Mathematical Physics. I: Functional Analysis. Academic Press, New York, 1972
1972
-
[21]
Tyrrell Rockafellar.Convex Analysis, volume 28 ofPrinceton Mathematical Series
R. Tyrrell Rockafellar.Convex Analysis, volume 28 ofPrinceton Mathematical Series. Princeton University Press, Princeton, NJ, 1970
1970
-
[22]
Birkh¨ auser, Cham, 2015
Filippo Santambrogio.Optimal Transport for Applied Mathematicians, volume 87 ofProgress in Nonlinear Differential Equations and Their Applications. Birkh¨ auser, Cham, 2015
2015
-
[23]
Maurice Sion. On general minimax theorems.Pacific Journal of Mathematics, 8(1):171–176, 1958.https: //projecteuclid.org/euclid.pjm/1103040253
-
[24]
American Mathematical Soc., 2021
C´ edric Villani.Topics in optimal transportation, volume 58. American Mathematical Soc., 2021
2021
-
[25]
Springer, 2008
C´ edric Villani et al.Optimal transport: old and new, volume 338. Springer, 2008
2008
-
[26]
Zhengxin Zhang, Ziv Goldfeld, Kristjan Greenewald, Youssef Mroueh, and Bharath K Sriperumbudur. Gra- dient flows and riemannian structure in the gromov-wasserstein geometry.arXiv preprint arXiv:2407.11800, 2024. Department of Mathematics, The University of Texas at Austin, 2515 Speedway Stop C1200, Austin, Texas 78712-1202 Email address:rene.cabrera@math....
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.