Center-Fed Pinching Antenna System for Uplink Environment Sensing
Pith reviewed 2026-06-25 20:12 UTC · model grok-4.3
The pith
Center-fed pinching antenna system achieves strictly lower reconstruction error bound than conventional end-fed systems in uplink environment sensing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Through the center-fed framework, doubled degrees of freedom is achieved compared to conventional end-fed PASS. A linear inverse model is developed to reconstruct the environment through signals scattered by the environment object. The distance between the feed points for stable separation of the received signals is characterized in closed form. Ziv-Zakai bound expressions for the mean-squared reconstruction error are derived for C-PASS and end-fed PASS, proving that C-PASS achieves a strictly lower reconstruction error bound than conventional PASS for uplink environment sensing.
What carries the argument
The center-fed pinching antenna system (C-PASS) that enables doubled degrees of freedom and supports a linear inverse model for environment reconstruction, along with the derived Ziv-Zakai bounds.
If this is right
- C-PASS provides more stable separation of the received signals than end-fed PASS.
- The derived ZZB expressions accurately predict the mean-squared reconstruction error.
- C-PASS demonstrates consistent performance advantages in numerical validations.
- Environment reconstruction benefits from the increased degrees of freedom in uplink scenarios.
Where Pith is reading between the lines
- The approach may generalize to other sensing modalities such as radar imaging or localization tasks.
- Combining C-PASS with advanced signal processing could further reduce errors in dynamic environments.
- Practical deployments might need to account for hardware imperfections not modeled in the linear inverse framework.
- This could influence the design of future antenna systems for integrated sensing and communication.
Load-bearing premise
The linear inverse model for reconstructing the environment from scattered signals is valid and the closed-form feed point distance allows stable separation without extra practical constraints.
What would settle it
A real-world experiment or simulation where the reconstruction error for C-PASS is not strictly lower than for end-fed PASS, or where the linear inverse model fails to accurately reconstruct the environment.
Figures

read the original abstract
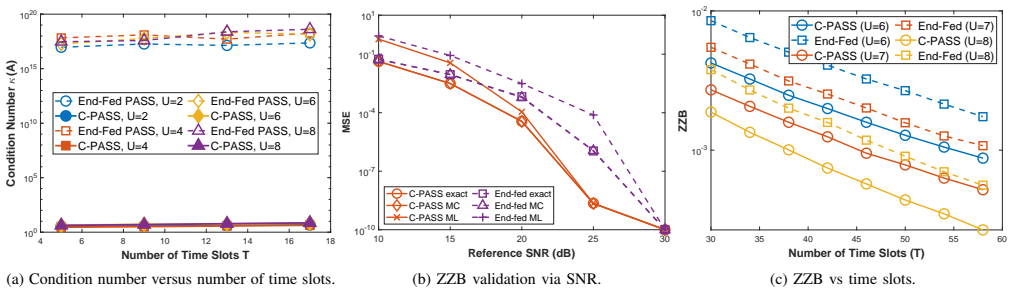
A center-fed pinching antenna system (C-PASS)-enabled uplink environment sensing framework is proposed. Through the center-fed framework, doubled degrees of freedom is achieved compared to conventional end-fed PASS. Based on this, we consider an uplink sensing scenario, in which a linear inverse model is developed to reconstruct the environment through signals scattered by the environment object. In the proposed framework, the distance between the feed points for stable separation of the received signals is characterized in closed form. Furthermore, Ziv-Zakai bound (ZZB) expressions for the mean-squared reconstruction error are derived for C-PASS and end-fed PASS. Based on these theoretical results, it can be proved that C-PASS achieves a strictly lower reconstruction error bound than conventional PASS for uplink environment sensing. Finally, numerical results validate the accuracy of the derived ZZB expressions and 1) demonstrate that C-PASS provides more stable separation of the received signals, and 2) confirm the consistent performance advantages of C-PASS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a center-fed pinching antenna system (C-PASS) for uplink environment sensing. It claims doubled degrees of freedom relative to end-fed PASS, develops a linear inverse model to reconstruct the environment from scattered signals, derives a closed-form expression for the feed-point separation distance that enables stable signal separation, obtains Ziv-Zakai bound (ZZB) expressions for the mean-squared reconstruction error of both architectures, and proves that the C-PASS ZZB is strictly lower than that of conventional PASS. Numerical results are reported to confirm the accuracy of the ZZB expressions and the performance advantages of C-PASS.
Significance. If the derivations hold, the paper supplies a concrete theoretical comparison, via explicitly derived ZZB expressions, between two pinching-antenna architectures for environment sensing. The closed-form separation distance and the strict inequality proof constitute a clear analytical contribution; the accompanying numerical validation of the bounds adds credibility. These elements together strengthen the case for center-fed designs in uplink sensing scenarios.
Simulated Author's Rebuttal
We thank the referee for the positive review, the clear summary of our contributions, and the recommendation to accept the manuscript.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper develops a linear inverse model for environment reconstruction from scattered signals, derives closed-form feed-point separation, then obtains ZZB expressions for reconstruction MSE under C-PASS versus end-fed PASS and proves the strict inequality. These steps are standard applications of the ZZB to the stated linear model; the comparison follows directly from the differing degrees of freedom without reducing any bound to a fitted parameter or self-citation. No self-definitional, fitted-input, or uniqueness-imported patterns appear. The result is externally falsifiable via the reported numerical validation of the ZZB expressions.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The center-fed framework achieves doubled degrees of freedom compared to conventional end-fed PASS.
- domain assumption A linear inverse model can reconstruct the environment from signals scattered by the environment object.
Reference graph
Works this paper leans on
-
[1]
Flexible-antenna systems: A pinching-antenna perspective,
Z. Ding, R. Schober, and H. Vincent Poor, “Flexible-antenna systems: A pinching-antenna perspective,”IEEE Trans. Commun., vol. 73, no. 10, pp. 9236–9253, Oct. 2025
2025
-
[2]
Pinching- antenna systems: Architecture designs, opportunities, and outlook,
Y . Liu, Z. Wang, X. Mu, C. Ouyang, X. Xu, and Z. Ding, “Pinching- antenna systems: Architecture designs, opportunities, and outlook,” IEEE Commun. Mag., pp. 1–7, Sep. 2025
2025
-
[3]
Wireless sensing via pinching-antenna systems,
Z. Wang, C. Ouyang, Y . Liu, and A. Nallanathan, “Wireless sensing via pinching-antenna systems,”IEEE Wireless Commun. Lett., vol. 14, no. 11, pp. 3475–3479, Aug. 2025
2025
-
[4]
Pinching antenna-enabled ISAC systems: Exploiting look-angle dependence of RCS for target diversity,
A. Khalili, B. Kaziu, V . K. Papanikolaou, and R. Schober, “Pinching antenna-enabled ISAC systems: Exploiting look-angle dependence of RCS for target diversity,”arXiv preprint arXiv:2505.01777, 2025
arXiv 2025
-
[5]
ISAC rate region of pinching-antenna systems,
C. Ouyang, Z. Wang, Y . Zou, Y . Liu, and Z. Ding, “ISAC rate region of pinching-antenna systems,” inProc. IEEE/CIC Int. Conf. Commun. (ICCC Workshops), Shanghai, China, Aug.2025, pp. 1–6
2025
-
[6]
Deep-learning-based multinode ISAC 4D environmental reconstruction with uplink–downlink cooperation,
B. Lu, Z. Wei, H. Wu, X. Zeng, L. Wang, X. Lu, D. Mei, and Z. Feng, “Deep-learning-based multinode ISAC 4D environmental reconstruction with uplink–downlink cooperation,”IEEE Internet of Things Journal, vol. 11, no. 24, pp. 39 512–39 526, Dec. 2024
2024
-
[7]
Channel estimation for pinching-antenna systems (PASS),
J. Xiao, J. Wang, and Y . Liu, “Channel estimation for pinching-antenna systems (PASS),”IEEE Communications Letters, vol. 29, no. 8, pp. 1789–1793, Aug. 2025
2025
-
[8]
Pinching-antenna systems (PASS): A tutorial,
Y . Liu, H. Jiang, X. Xu, Z. Wang, J. Guo, C. Ouyang, X. Mu, Z. Ding, A. Nallanathan, G. K. Karagiannidis, and R. Schober, “Pinching-antenna systems (PASS): A tutorial,”IEEE Transactions on Communications, vol. 74, pp. 4881–4918, Jan. 2026
2026
-
[9]
Pinching-antenna system- assisted localization: A stochastic geometry perspective,
J. He, X. Mu, H. Q. Ngo, and M. Matthaiou, “Pinching-antenna system- assisted localization: A stochastic geometry perspective,”IEEE Wireless Communications Letters, vol. 15, pp. 1737–1741, Feb. 2026
2026
-
[10]
C-PASS: Center-fed pinching antenna system,
X. Gan and Y . Liu, “C-PASS: Center-fed pinching antenna system,” arXiv preprint arXiv:2512.12619, 2025
Pith/arXiv arXiv 2025
-
[11]
Center-fed pinching antenna system (C-PASS): Modeling, anal- ysis, and beamforming design,
——, “Center-fed pinching antenna system (C-PASS): Modeling, anal- ysis, and beamforming design,”arXiv preprint arXiv:2602.14805, 2026
arXiv 2026
-
[12]
Center-fed pinching antenna system (C-PASS) aided wireless communications,
——, “Center-fed pinching antenna system (C-PASS) aided wireless communications,”arXiv preprint arXiv:2601.07424, 2026
arXiv 2026
-
[13]
A comprehensive study on Ziv- Zakai lower bounds on the MMSE,
M. Jeong, A. Dytso, and M. Cardone, “A comprehensive study on Ziv- Zakai lower bounds on the MMSE,”IEEE Trans. Inf. Theory, vol. 71, no. 4, pp. 3214–3236, Apr. 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.