Recognition: 2 theorem links
· Lean TheoremSupervised Guidance Training for Infinite-Dimensional Diffusion Models
Pith reviewed 2026-05-16 10:27 UTC · model grok-4.3
The pith
Infinite-dimensional diffusion models can be conditioned to sample from posteriors using an extension of Doob's h-transform and supervised guidance training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We prove that the models can be conditioned using an infinite-dimensional extension of Doob's h-transform, and that the conditional score decomposes into an unconditional score and a guidance term. As the guidance term is intractable, we propose a simulation-free score matching objective (called Supervised Guidance Training) enabling efficient and stable posterior sampling. We illustrate the theory with numerical examples on Bayesian inverse problems in function spaces.
What carries the argument
The infinite-dimensional Doob's h-transform, which decomposes the conditional score into the unconditional score plus an additive guidance term, together with the supervised guidance training objective that approximates the intractable guidance via score matching.
If this is right
- A pre-trained diffusion model can be fine-tuned once to produce samples from the posterior without any simulation of the reverse process.
- The same procedure applies directly to inverse problems whose unknowns are functions, such as those governed by partial differential equations.
- Posterior sampling becomes possible in function space while retaining the expressive power of the original diffusion prior.
- Training remains stable because the objective is simulation-free and uses only score-matching losses.
Where Pith is reading between the lines
- The guidance decomposition may extend to other conditioning signals besides likelihood terms, such as constraints or external controls.
- Function-space operation could mitigate dimensionality issues when the underlying data truly lives on a continuum rather than a fixed grid.
- The supervised objective might be combined with existing finite-dimensional guidance techniques to handle hybrid discrete-continuous settings.
Load-bearing premise
The prior distribution either lies in the Cameron-Martin space or is absolutely continuous with respect to a Gaussian measure.
What would settle it
Generate samples from the supervised-guidance-trained model on a discretized Bayesian inverse problem whose true posterior is independently computable by MCMC or another exact method, then compare empirical moments or densities of the generated samples against those of the true posterior.
Figures




read the original abstract
Score-based diffusion models have recently been extended to infinite-dimensional function spaces, with uses such as inverse problems arising from partial differential equations. In the Bayesian formulation of inverse problems, the aim is to sample from a posterior distribution over functions obtained by conditioning a prior on noisy observations. While diffusion models provide expressive priors in function space, the theory of conditioning them to sample from the posterior remains open. We address this, assuming that either the prior lies in the Cameron-Martin space, or is absolutely continuous with respect to a Gaussian measure. We prove that the models can be conditioned using an infinite-dimensional extension of Doob's $h$-transform, and that the conditional score decomposes into an unconditional score and a guidance term. As the guidance term is intractable, we propose a simulation-free score matching objective (called Supervised Guidance Training) enabling efficient and stable posterior sampling. We illustrate the theory with numerical examples on Bayesian inverse problems in function spaces. In summary, our work offers the first function-space method for fine-tuning trained diffusion models to accurately sample from a posterior.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends score-based diffusion models to infinite-dimensional function spaces for Bayesian inverse problems. Under the assumption that the prior lies in the Cameron-Martin space or is absolutely continuous w.r.t. a Gaussian measure, it proves an infinite-dimensional extension of Doob's h-transform, shows that the conditional score decomposes into an unconditional score plus a guidance term, and introduces a simulation-free Supervised Guidance Training objective to learn the intractable guidance term. Numerical examples on function-space Bayesian inverse problems are provided to illustrate the approach.
Significance. If the central theoretical extension holds, the work is significant because it supplies the first rigorous function-space method for conditioning pre-trained diffusion models to sample from posteriors, directly addressing an open theoretical gap for applications such as PDE inverse problems where function-valued priors are natural. The simulation-free matching loss is a practical advantage over methods requiring posterior sampling during training.
major comments (2)
- [Prior measure assumption (§2)] The assumption that the prior lies in the Cameron-Martin space or is absolutely continuous with respect to a Gaussian measure (abstract and §2) is load-bearing for the existence of the Radon-Nikodym derivative and the well-definedness of the infinite-dimensional h-transform. The manuscript should add an explicit discussion of how restrictive this is for typical non-Gaussian priors arising in PDE inverse problems and whether the decomposition fails outside this regime.
- [h-transform proof and score decomposition (§3)] The proof of the conditional score decomposition (Eq. (X) in §3) and the claim that Supervised Guidance Training recovers the exact posterior must be presented with full details, including regularity conditions on the guidance term in function space and an error analysis showing that the simulation-free objective does not introduce bias that prevents exact posterior sampling.
minor comments (2)
- [Notation and definitions] Clarify the precise definition of the infinite-dimensional score and guidance operators to avoid ambiguity in the notation for function-space objects.
- [Numerical experiments] The numerical examples section would benefit from additional quantitative metrics (e.g., posterior mean error, coverage) and explicit comparison against finite-dimensional baselines or existing conditioning methods.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address each major comment below and will revise the manuscript to incorporate the suggested clarifications and expansions.
read point-by-point responses
-
Referee: [Prior measure assumption (§2)] The assumption that the prior lies in the Cameron-Martin space or is absolutely continuous with respect to a Gaussian measure (abstract and §2) is load-bearing for the existence of the Radon-Nikodym derivative and the well-definedness of the infinite-dimensional h-transform. The manuscript should add an explicit discussion of how restrictive this is for typical non-Gaussian priors arising in PDE inverse problems and whether the decomposition fails outside this regime.
Authors: We agree that the assumption is central to the Radon-Nikodym derivative and the h-transform construction. In the revised manuscript we will add a dedicated paragraph in §2 discussing its scope: many priors used in PDE inverse problems (e.g., Matérn Gaussian processes or log-Gaussian fields) satisfy absolute continuity with respect to a Gaussian reference measure, so the framework applies directly. We will also note that for priors that are mutually singular with every Gaussian measure the decomposition does not hold in the present form and alternative conditioning strategies would be required; this limitation will be stated explicitly. revision: yes
-
Referee: [h-transform proof and score decomposition (§3)] The proof of the conditional score decomposition (Eq. (X) in §3) and the claim that Supervised Guidance Training recovers the exact posterior must be presented with full details, including regularity conditions on the guidance term in function space and an error analysis showing that the simulation-free objective does not introduce bias that prevents exact posterior sampling.
Authors: We will expand §3 to include the complete proof of the conditional score decomposition together with the required regularity conditions on the guidance term (e.g., square-integrability in the Cameron-Martin space and Lipschitz continuity of the observation map). We will also add an error analysis showing that the simulation-free supervised objective converges to the true guidance term in the appropriate function-space norm, implying that the learned conditional score yields exact posterior sampling in the limit of infinite data and model capacity. These additions will be placed immediately after the statement of the decomposition. revision: yes
Circularity Check
No significant circularity; derivation extends classical Doob h-transform
full rationale
The paper states an explicit assumption (prior in Cameron-Martin space or absolutely continuous w.r.t. Gaussian) and proves an infinite-dimensional extension of Doob's h-transform, yielding the conditional score decomposition into unconditional score plus guidance term. The Supervised Guidance Training objective is then introduced as a simulation-free matching loss to replace the intractable term. No equations reduce the claimed results to fitted parameters by construction, no self-citations are invoked as load-bearing uniqueness theorems, and the derivation chain relies on classical probability results extended to function space rather than renaming or smuggling ansatzes from prior author work. The numerical examples on Bayesian inverse problems validate the method inside the stated assumption regime without circular reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The prior measure either lies in the Cameron-Martin space or is absolutely continuous with respect to a Gaussian measure
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We prove that the models can be conditioned using an infinite-dimensional extension of Doob’s h-transform... assuming that either the prior lies in the Cameron-Martin space, or is absolutely continuous with respect to a Gaussian measure.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the conditional score decomposes into an unconditional score and a guidance term
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
GRIFDIR: Graph Resolution-Invariant FEM Diffusion Models in Function Spaces over Irregular Domains
GRIFDIR proposes graph resolution-invariant FEM diffusion models that maintain resolution invariance and high fidelity on complex irregular domains.
Reference graph
Works this paper leans on
-
[1]
Conditional image generation with score-based diffusion models.arXiv preprint arXiv:2111.13606,
Batzolis, G., Stanczuk, J., Sch¨onlieb, C.-B., and Etmann, C. Conditional image generation with score-based diffusion models.arXiv preprint arXiv:2111.13606,
-
[2]
doi: 10.1007/978-3-319-12385-1
ISBN 978-3-319-12385-1. doi: 10.1007/978-3-319-12385-1
-
[3]
Neural operator: Graph kernel network for partial differential equations
Li, Z., Kovachki, N., Azizzadenesheli, K., Liu, B., Bhat- tacharya, K., Stuart, A., and Anandkumar, A. Neural operator: Graph kernel network for partial differential equations. InICLR 2020 Workshop on Integration of Deep Neural Models and Differential Equations,
work page 2020
-
[4]
Learning PDE solution operator for continuous modeling of time-series
Park, Y ., Choi, J., Yoon, C., Kang, M., et al. Learning PDE solution operator for continuous modeling of time-series. arXiv preprint arXiv:2302.00854,
-
[5]
Ramachandran, P., Zoph, B., and Le, Q. V . Searching for activation functions.arXiv preprint arXiv:1710.05941,
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Uehara, M., Zhao, Y ., Black, K., Hajiramezanali, E., Scalia, G., Diamant, N. L., Tseng, A. M., Biancalani, T., and Levine, S. Fine-tuning of continuous-time diffusion models as entropy-regularized control.arXiv preprint arXiv:2402.15194,
-
[7]
Moreover, writingZ t with respect to the measureQsatisfies(29)
Then we can define another distributionQvia dQ=h y(T, ZT )dP. Moreover, writingZ t with respect to the measureQsatisfies(29). Proof.We will apply Theorem 5.1 from Baker et al. (2024), which says that if 1.h y is twice Fr´echet differentiable with respect to z∈H and once differentiable with respect to t, with continuous derivatives,
work page 2024
-
[8]
only relies onh y being once Fr´echet differentiable with respect toz, therefore this is what we will use. That the time-reversal has a strong solution holds from Theorem 12 and Theorem 13 of Pidstrigach et al. (2024), for Setting 1 or Setting 2 respectively. Moreover, following Lemma 5.2 of Baker et al. (2024) and noting that the proof does not depend on...
work page 2024
-
[9]
Then hy(t, x) is Fr´echet differentiable with respect tox. Proof. The proof for this is similar to the proof that s(t, x) is Lipschitz continuous in Theorem 12 by Pidstrigach et al. (2024). Let Xt be a solution to the forward SDE in (6). Then given X0 ∈H , we know that the transition kernel from X0 at time0to timetis given by N(e − t 2 X0,(1−e −t)C).(38) ...
work page 2024
-
[10]
Proof of Theorem 3.2 We prove Theorem 3.2, in two lemmas for the two settings
exp(−Φ(x0, y))dπ(x0)(44e) = Z P(A|x 0)dπy(x0) =P(A|Y=y).(44f) A.2. Proof of Theorem 3.2 We prove Theorem 3.2, in two lemmas for the two settings. For a proof under Setting 1 see Lemma A.6 and for a proof under Setting 2 see Lemma A.7. Lemma A.6.Let Setting 1 hold. Then C∇logh y(t, x) =s y(t, x)−s(t, x).(45) 14 Supervised Guidance Training for Infinite-Dim...
work page 2010
-
[11]
or inverse problems (Denker et al., 2024). LetPbe the path measure of the unconditional reverse SDE (7), which we re-state here dZt = 1 2 Zt +s(T−t, Z t) dt+ √ CdW H t . Let us define E(Q) :=KL(Q||P) +E Q[Φ(ZT , y)],(83) for allQ≪P. Then, we have the following proposition. Proposition B.1.The conditional path measureP y is the unique minimiser ofF(Q). Pro...
work page 2024
-
[12]
to design network architectures which can be applied to any discretisation. The original FNO architecture does not incorporate additional time information, while in our case the score depends explicitly on the time. For this, we make use of a learnable time-embedding, which was previously used for diffusion bridges (Yang et al., 2025a) and PDE application...
work page 2023
-
[13]
The unconditional diffusion model is trained for 40 000 gradient steps. We use a time-modulated FNO with 4 layers, 16 modes and 64 hidden channels, which results in 1 140 161 trainable parameters. For the conditional diffusion model, we use 8 FNO layers with 16 modes and a hidden channel dimension of 128, which results in 8 737 153trainable parameters. We...
work page 2007
-
[14]
We train the conditional diffusion model using the loss function in Baldassari et al
In total, the diffusion model has 1 140 161trainable parameters. We train the conditional diffusion model using the loss function in Baldassari et al. (2023). The conditional diffusion models depends explicitly on the observations y. For this experiment both the observation and the ground truth signal are functions overΩ. We discretise both on the same sp...
work page 2023
-
[15]
We useν= 1for the covariance operator in Equation (26)
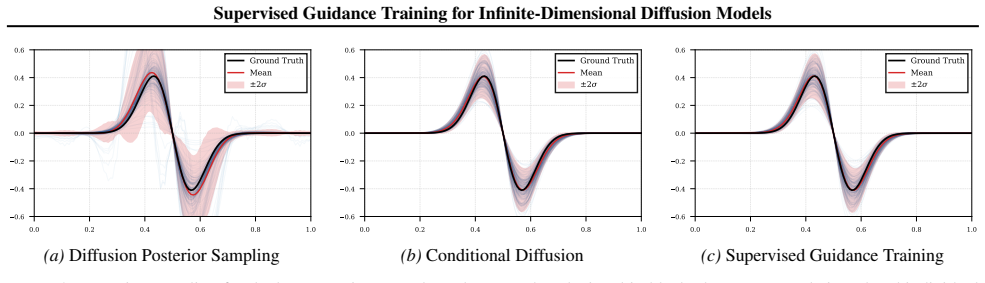
to simulate measurements. We useν= 1for the covariance operator in Equation (26). 21 Supervised Guidance Training for Infinite-Dimensional Diffusion Models 0.0 0.2 0.4 0.6 0.8 1.0 1.0 0.5 0.0 0.5 1.0 Ground Truth Mean ±2 0.0 0.2 0.4 0.6 0.8 1.0 1.0 0.5 0.0 0.5 1.0 Ground Truth Mean ±2 0.0 0.2 0.4 0.6 0.8 1.0 1.0 0.5 0.0 0.5 1.0 Ground Truth Mean ±2 0.0 0....
work page 1982
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.