Face Anything: 4D Face Reconstruction from Any Image Sequence
Pith reviewed 2026-05-10 02:35 UTC · model grok-4.3
The pith
Canonical facial point prediction unifies depth estimation, dense 3D geometry, and point tracking for 4D face reconstruction from single-view sequences.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The method formulates high-fidelity 4D facial reconstruction as canonical facial point prediction: each pixel receives a normalized facial coordinate in a shared canonical space. A transformer jointly predicts these coordinates and per-pixel depth after training on multi-view geometry data that has been non-rigidly warped into the canonical space. This single feed-forward architecture yields accurate depth, temporally stable dense 3D geometry, and robust facial point tracking on arbitrary image sequences.
What carries the argument
Canonical facial point prediction: a representation that assigns each pixel a normalized facial coordinate in a shared canonical space, converting dense tracking and dynamic reconstruction into a canonical reconstruction problem.
If this is right
- Accurate depth estimation from single-view image sequences
- Temporally stable reconstruction of dynamic 3D facial geometry
- Dense 3D output together with robust facial point tracking
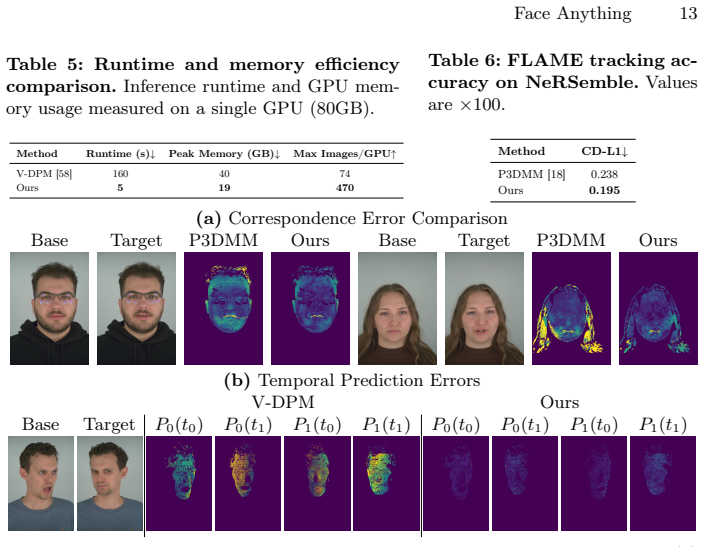
- Approximately 3 times lower correspondence error and 16 percent better depth accuracy than prior dynamic reconstruction methods
- Faster inference in a single feed-forward pass without post-processing
Where Pith is reading between the lines
- The feed-forward design could support real-time video pipelines where separate optimization stages are impractical.
- Enforcing consistency through a canonical space may reduce drift over long sequences compared with frame-by-frame methods.
- Similar coordinate-based representations might transfer to reconstruction of other non-rigid surfaces once appropriate canonical spaces are defined.
Load-bearing premise
Multi-view geometry data can be reliably non-rigidly warped into a shared canonical space so that a model trained on it will generalize to arbitrary single-view image sequences without extra constraints or post-processing.
What would settle it
A test sequence containing rapid expression changes or large viewpoint shifts where the predicted canonical coordinates produce drifting tracks across frames or depth values that deviate measurably from ground-truth multi-view reconstructions.
Figures










read the original abstract
Accurate reconstruction and tracking of dynamic human faces from image sequences is challenging because non-rigid deformations, expression changes, and viewpoint variations occur simultaneously, creating significant ambiguity in geometry and correspondence estimation. We present a unified method for high-fidelity 4D facial reconstruction based on canonical facial point prediction, a representation that assigns each pixel a normalized facial coordinate in a shared canonical space. This formulation transforms dense tracking and dynamic reconstruction into a canonical reconstruction problem, enabling temporally consistent geometry and reliable correspondences within a single feed-forward model. By jointly predicting depth and canonical coordinates, our method enables accurate depth estimation, temporally stable reconstruction, dense 3D geometry, and robust facial point tracking within a single architecture. We implement this formulation using a transformer-based model that jointly predicts depth and canonical facial coordinates, trained using multi-view geometry data that non-rigidly warps into the canonical space. Extensive experiments on image and video benchmarks demonstrate state-of-the-art performance across reconstruction and tracking tasks, achieving approximately 3$\times$ lower correspondence error and faster inference than prior dynamic reconstruction methods, while improving depth accuracy by 16%. These results highlight canonical facial point prediction as an effective foundation for unified feed-forward 4D facial reconstruction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a unified feed-forward method for 4D facial reconstruction from any image sequence using canonical facial point prediction. By assigning each pixel a normalized coordinate in a shared canonical space and jointly predicting depth, the approach converts dense tracking and dynamic reconstruction into a canonical problem. A transformer model is trained on multi-view geometry data non-rigidly warped into this canonical space, claiming state-of-the-art performance with approximately 3 times lower correspondence error, 16% improved depth accuracy, and faster inference compared to prior methods.
Significance. If validated, this work offers a significant advancement in dynamic face reconstruction by providing a single architecture for accurate depth estimation, temporally stable geometry, dense 3D output, and robust point tracking without post-processing. The canonical coordinate representation is a strength for handling non-rigid deformations and viewpoint variations. Credit is due for the joint prediction formulation and the emphasis on feed-forward efficiency.
major comments (2)
- [Method (training procedure)] The non-rigid warping of multi-view data into canonical space is central to generating training labels (described in the method section), yet no quantitative validation of the warping accuracy, residual alignment errors, or sensitivity to expression changes and occlusions is provided. Given that the model is strictly feed-forward at inference on monocular sequences, any supervision noise from imperfect warping directly impacts the claimed generalization and the reported 3× correspondence improvement.
- [Experiments] The abstract and results section report benchmark improvements (3× correspondence error reduction, 16% depth gain) but omit details on error bars, exact baseline implementations, data splits, ablation studies, or statistical significance tests. This absence undermines the ability to assess the robustness of the SOTA claims and the temporal stability assertions.
minor comments (2)
- [Abstract] The phrasing 'Face Anything' in the title and 'any image sequence' could be clarified to specify the assumptions on input quality or face visibility.
- [Notation] The definition of canonical facial coordinates should include an explicit equation or diagram showing how normalization is performed across different expressions and views.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of the work's significance. We address each major comment below with clarifications and commit to revisions that strengthen the manuscript without misrepresenting the original contributions.
read point-by-point responses
-
Referee: [Method (training procedure)] The non-rigid warping of multi-view data into canonical space is central to generating training labels (described in the method section), yet no quantitative validation of the warping accuracy, residual alignment errors, or sensitivity to expression changes and occlusions is provided. Given that the model is strictly feed-forward at inference on monocular sequences, any supervision noise from imperfect warping directly impacts the claimed generalization and the reported 3× correspondence improvement.
Authors: We agree that quantitative validation of the non-rigid warping procedure would provide stronger evidence for the quality of the generated training labels. In the revised manuscript, we will add a new subsection (or supplementary material) reporting metrics such as mean residual alignment error on held-out multi-view sequences, before/after warping comparisons, and sensitivity analyses to expression changes and partial occlusions. These additions will directly support the reliability of the supervision and the generalization claims. revision: yes
-
Referee: [Experiments] The abstract and results section report benchmark improvements (3× correspondence error reduction, 16% depth gain) but omit details on error bars, exact baseline implementations, data splits, ablation studies, or statistical significance tests. This absence undermines the ability to assess the robustness of the SOTA claims and the temporal stability assertions.
Authors: We acknowledge that additional experimental details are necessary for full reproducibility and to rigorously substantiate the reported improvements. In the revised version, we will expand the experiments section and supplementary material to include error bars (standard deviations across runs), precise specifications of baseline implementations and data splits, further ablation studies on the joint prediction and canonical representation, and statistical significance tests (e.g., paired t-tests) for the key metrics. These changes will also address the temporal stability claims with supporting quantitative evidence. revision: yes
Circularity Check
No circularity: canonical coordinate prediction is learned from external warped multi-view data
full rationale
The paper defines canonical facial points by non-rigidly warping multi-view geometry into a shared space and trains a transformer to regress depth plus these coordinates from monocular images. This is a standard supervised mapping with no equations that reduce the predicted outputs to the training inputs by construction, no self-citations invoked as uniqueness theorems, and no fitted parameters renamed as predictions. Evaluation occurs on separate benchmarks, so the claimed gains in correspondence and depth accuracy remain independent of the derivation inputs.
Axiom & Free-Parameter Ledger
invented entities (1)
-
canonical facial coordinates
no independent evidence
Forward citations
Cited by 1 Pith paper
-
GeoFace: Consistent Multi-View Face Generation with Geometry-Constrained Diffusion
GeoFace generates consistent multi-view face images and 3D geometry from one input via a dual-stream diffusion framework with geometry-guided attention alignment.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.