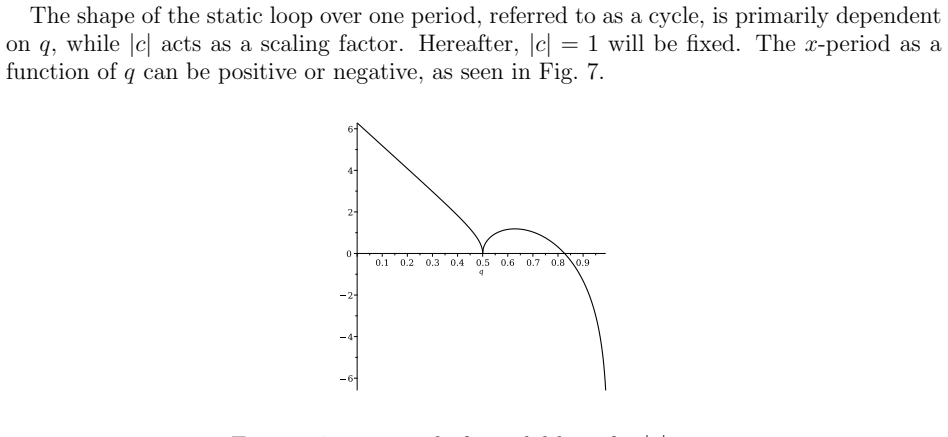
Geometric curve flows in the plane and mKdV loop solutions
Pith reviewed 2026-06-27 17:12 UTC · model grok-4.3
The pith
mKdV travelling waves yield explicit geometric curve flows in the plane that form either travelling loops or rotating loops via a quadrature formula.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
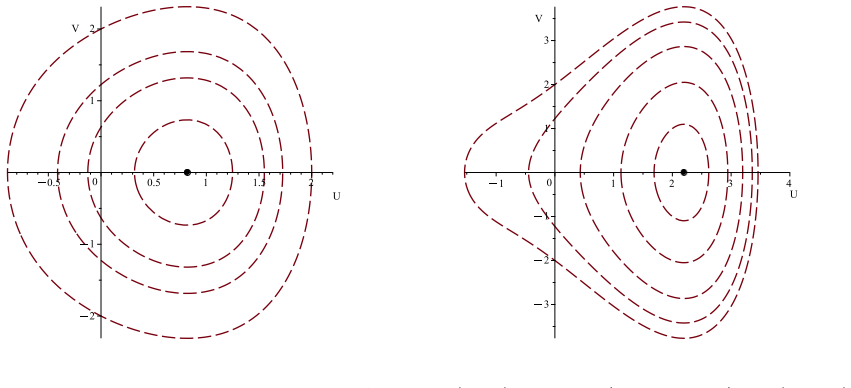
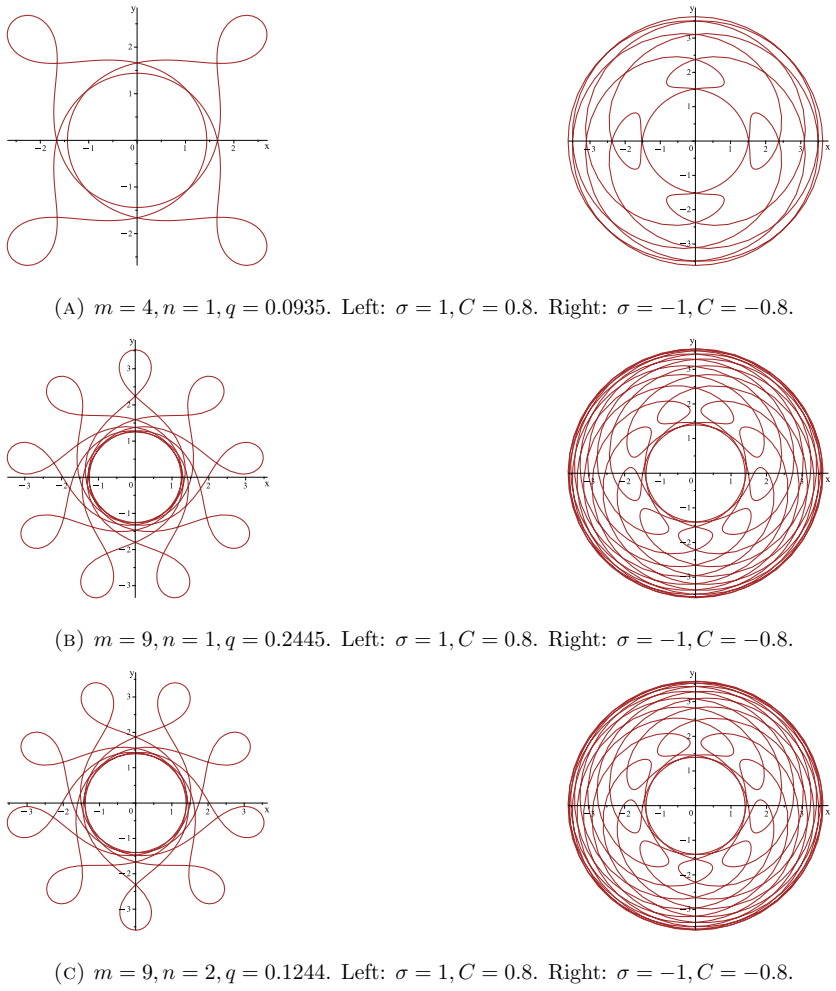
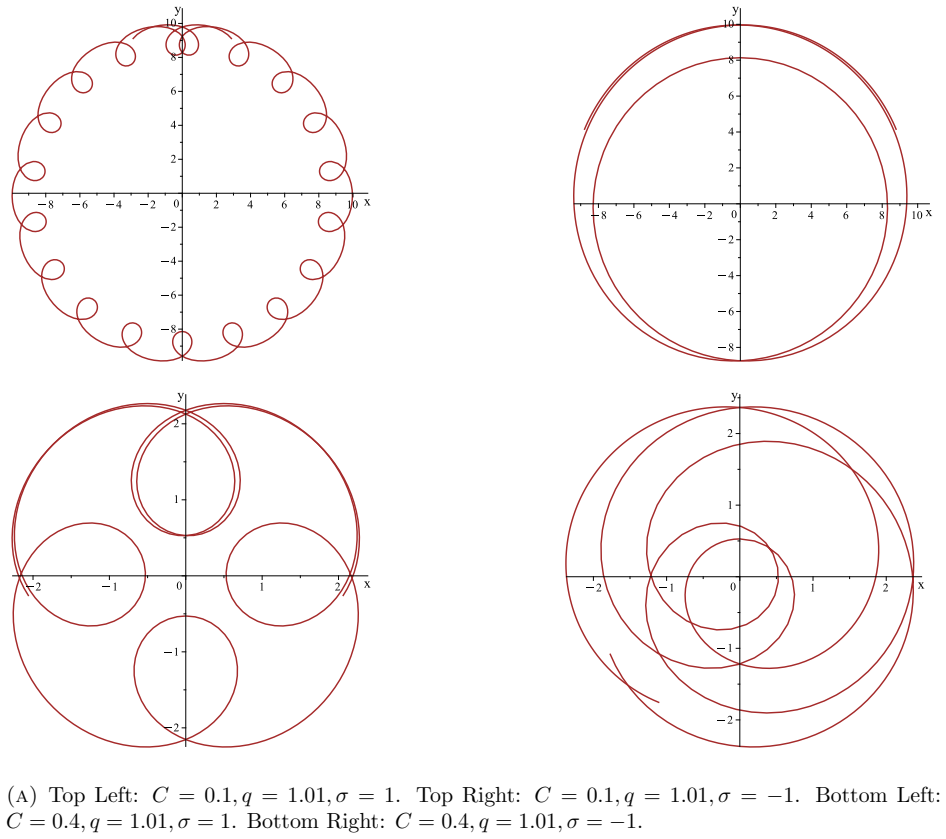
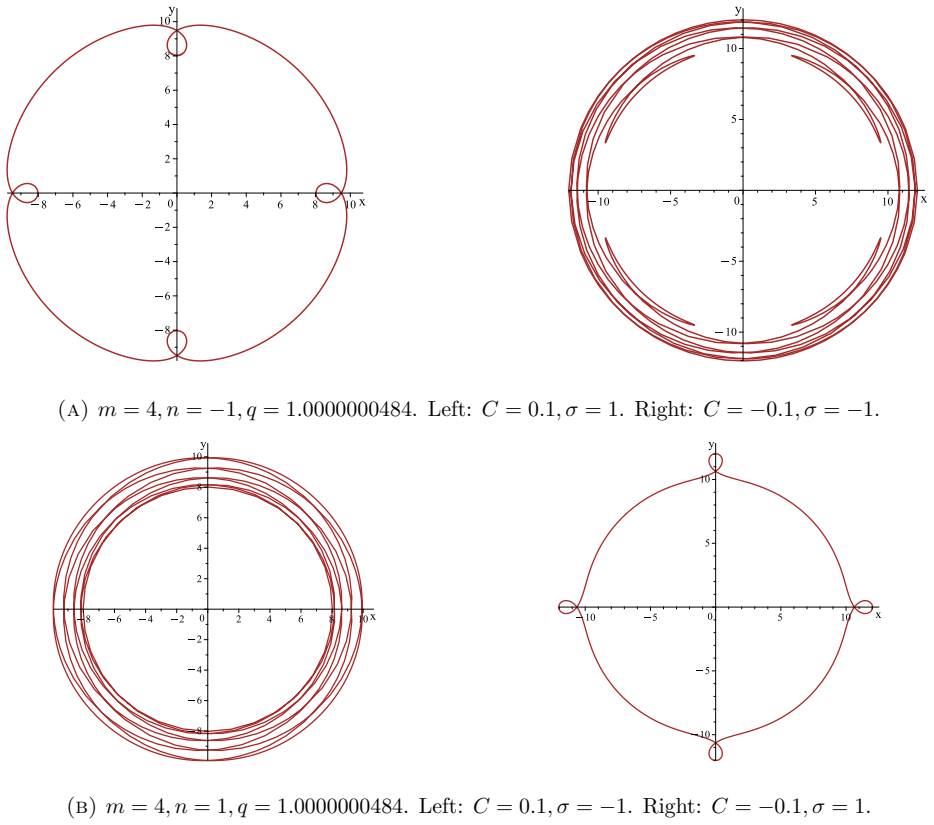
For every type of mKdV travelling wave the corresponding plane curve flow is obtained by quadrature from the wave profile; the resulting curves fall into travelling loops (from solitons, cnoidal waves, and dnoidal waves) and rotating loops (from solitary waves on nonzero background, rational waves, and rational elliptic waves), with explicit conditions for closure of both open and closed periodic loops, including a rational-cosine specialization.
What carries the argument
The quadrature formula that integrates the mKdV travelling-wave profile to obtain the curve's tangent angle as a function of arc length.
If this is right
- Soliton, cnoidal, and dnoidal mKdV waves produce translating loop curves whose shape is fixed by a single integral.
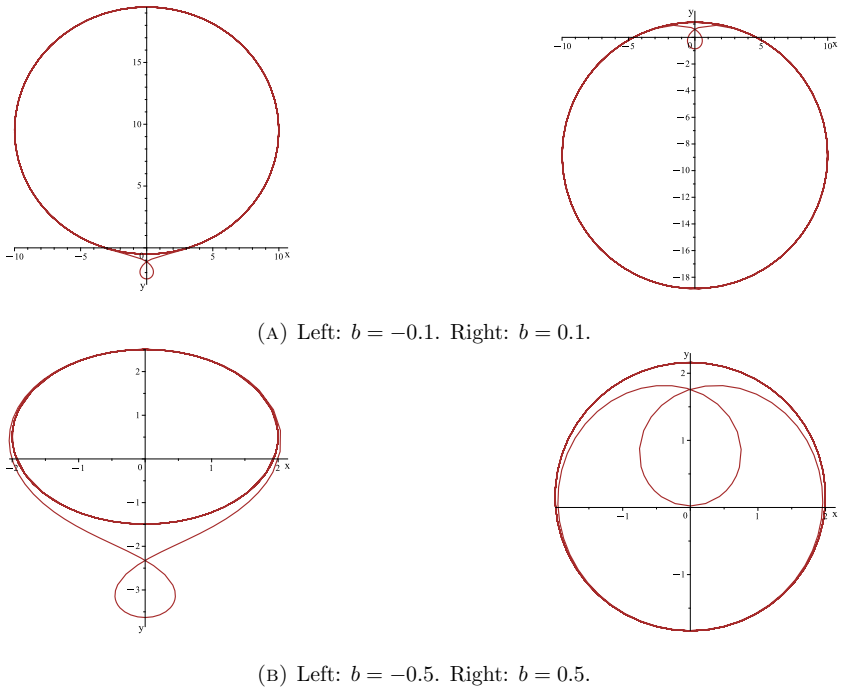
- Background and rational mKdV waves produce rotating loops whose angular speed is set by the background value.
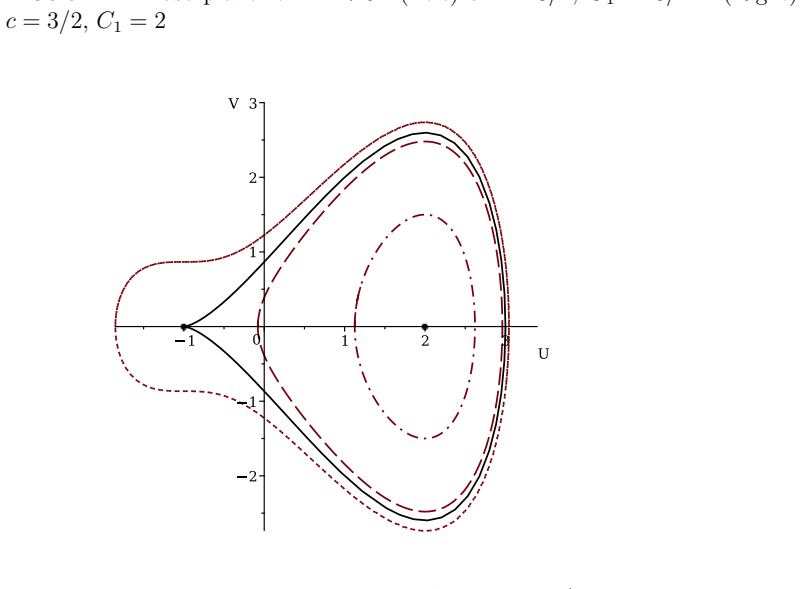
- Rational elliptic mKdV waves produce periodic rotating loops, some of which close after a finite number of turns.
- A further reduction of the periodic case yields rational cosine loops whose curvature is a rational function of cosine.
- Closed loops exist only when the integrated phase advance over one period is an integer multiple of 2π.
Where Pith is reading between the lines
- The quadrature method supplies a direct geometric picture of every mKdV travelling wave as an actual plane curve, which could be used to test numerical integrators of the curve flow.
- Because the same quadrature works for both open and closed loops, it may extend to other integrable curve flows whose curvature satisfies related nonlinear equations.
- The distinction between translating and rotating families suggests a conserved quantity (total turning or enclosed area) that separates the two classes.
Load-bearing premise
The standard correspondence between mKdV solutions and geometric curve flows in the plane continues to hold exactly for the travelling-wave profiles examined here.
What would settle it
Compute one explicit curve from the quadrature formula applied to a known mKdV soliton and check whether its time evolution satisfies the mKdV-derived curvature flow equation at more than one point along the curve.
Figures































read the original abstract
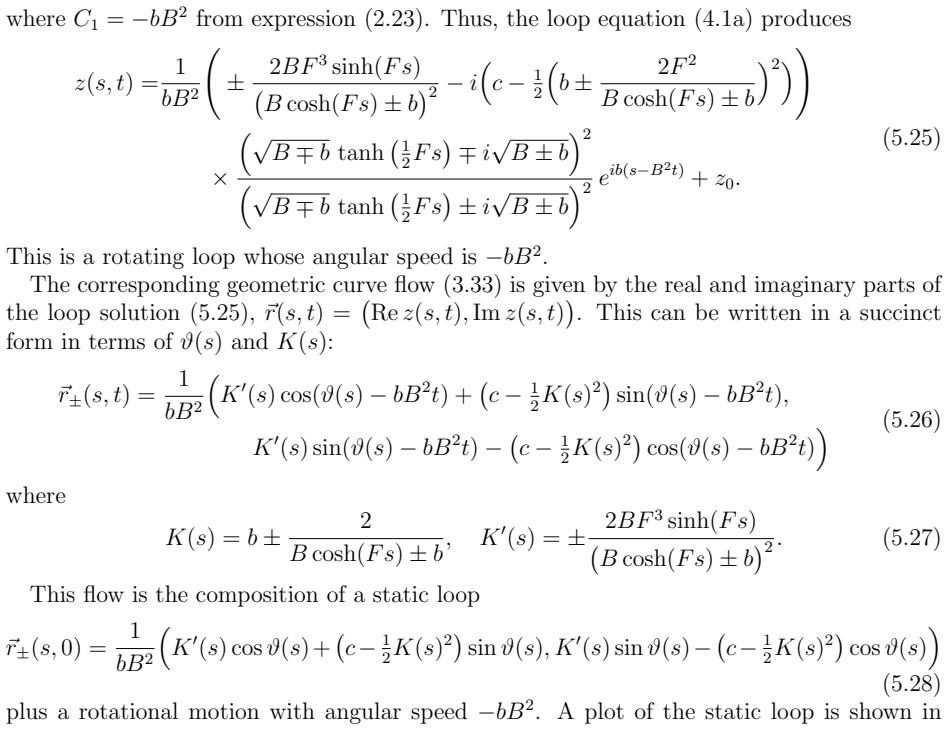
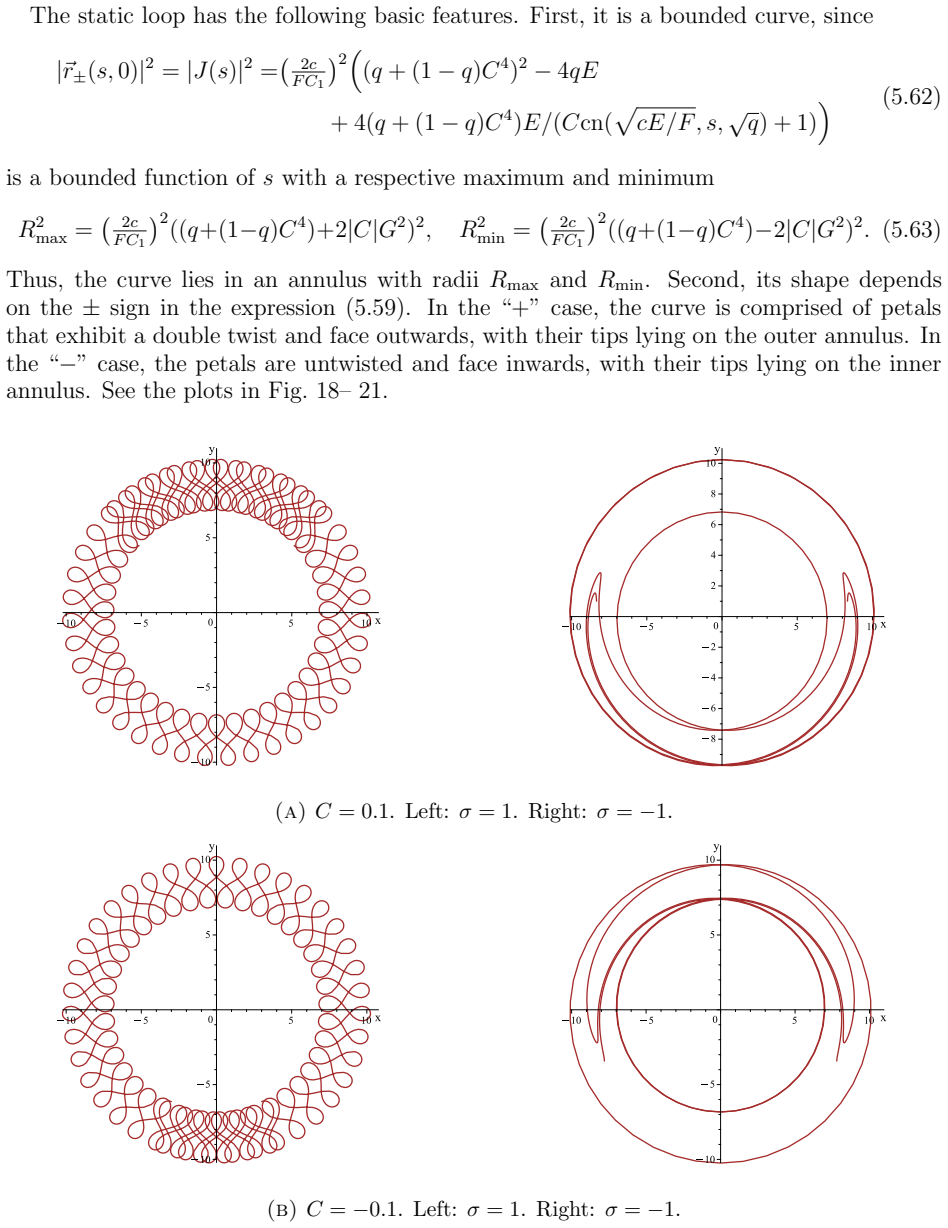
There is a well known correspondence between geometric curve flows in the Euclidean plane and solutions of the modified Korteweg-de Vries (mKdV) equation. For each type of mKdV travelling wave, the resulting geometric curve flows are derived here through a simple quadrature formula and studied in detail. These curve flows can be divided into two broad types: travelling loops, and rotating loops. Travelling loops are shown to arise from mKdV solitons, cnoidal (Jacobi cn) and dnoidal (Jacobi dn) waves, the latter being periodic. Rotating loops comprise asymptotically circular ones that are obtained from both mKdV solitary waves on a non-zero background and mKdV rational waves, as well as periodic ones that are produced by mKdV rational elliptic (cn and dn) waves. A specialization of periodic loops, both open and closed, is shown to yield rational cosine loops. An explicit description of each of these types of curve flows is used to characterize their main features, including the condition under which closed loops exist.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript studies the geometric curve flows in the Euclidean plane that arise from travelling-wave solutions of the mKdV equation under the standard curvature-flow correspondence. For solitons, cnoidal (Jacobi cn), dnoidal (Jacobi dn), rational, and rational-elliptic waves, the flows are obtained explicitly by quadrature; the resulting motions are classified into travelling loops (from zero-background solitons and periodic waves) and rotating loops (from nonzero-background solitary waves, rational waves, and periodic rational-elliptic waves), with a further specialization to rational cosine loops. Closed-loop existence conditions are derived from the explicit integrals.
Significance. The explicit quadrature derivations supply concrete, parameter-free geometric realizations of standard mKdV travelling waves as loop evolutions. This classification into travelling versus rotating loops, together with the closed-loop criteria, furnishes a useful dictionary between integrable PDE solutions and planar curve dynamics that can be checked directly against the integrals.
minor comments (2)
- [Abstract] Abstract: the phrase 'rational elliptic (cn and dn) waves' is used without a preceding definition or citation; a brief parenthetical reminder of the form of these solutions would aid readers unfamiliar with the rational-elliptic mKdV family.
- The manuscript would benefit from a short table or enumerated list summarizing the quadrature formula, the resulting loop type, and the closed-loop condition for each wave family.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript and for recommending acceptance with no major comments.
Circularity Check
No significant circularity
full rationale
The derivation begins from the standard, externally established correspondence between Euclidean plane curve flows and mKdV solutions, then integrates the resulting curvature ODEs by quadrature for known travelling-wave profiles. All subsequent classification into travelling/rotating loops and closed-loop conditions follows directly from the explicit integrals without any parameter fitting, self-referential definitions, or load-bearing self-citations. The central steps remain independent of the paper's own outputs.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Perturbation theory for kinks of the defocusing modified Korteweg-de Vries equation
Develops integrable perturbation theory for defocusing mKdV kinks, derives completeness and adjoint relations, obtains leading-order evolution equations for kink parameters, and shows generic radiative shelf formation...
Reference graph
Works this paper leans on
-
[1]
Nakayama, H
K. Nakayama, H. Segur, M. Wadati, Integrability and the motion of curves, Phys. Rev. Lett. 69 (1992), 2603–2606
1992
-
[2]
Goldstein and D.M
R.E. Goldstein and D.M. Petrich, Solitons, Euler’s equation, and the geometry of curve motion. In Singularities in Fluids, Plasmas and Optics, 93–109, Eds. R.E. Caflisch, G.G. Papanicolaou, Kluwer 1993
1993
-
[3]
Goldstein and D.M
R.E. Goldstein and D.M. Petrich, The Korteweg–de Vries hierarchy as dynamics of closed curves in the plane, Phys. Rev. Lett. 67(23) (1991), 3203–3206
1991
-
[4]
Goldstein and D.M
R.E. Goldstein and D.M. Petrich, Solitons, Euler’s equation, and vortex patch dynamics, Phys. Rev. Lett. 69 (1992), 555–558
1992
-
[5]
Wexler, A.T
C. Wexler, A.T. Dorsey, Solitons on the edge of a two-dimensional electron system, Phys. Rev. Lett. 82(3) (1999), 620–623
1999
-
[6]
Wexler, A.T
C. Wexler, A.T. Dorsey, Contour dynamics, waves, and solitons in the quantum Hall effect, Phys. Rev. B 60(15) (1999), 10971–10983
1999
-
[7]
Vassilev, P.A
V.M. Vassilev, P.A. Djondjorov, I.M. Mladenov, Cylindrical equilibrium shapes of fluid membranes, J. Phys. A: Math. Theor. 41 (2008), 435201
2008
-
[8]
Nishinari, Nonlinear dynamics of solitary waves in an extensible rod, Proc
K. Nishinari, Nonlinear dynamics of solitary waves in an extensible rod, Proc. Roy. Soc. A 453 (1997), 817–833
1997
-
[9]
Nakayama, M
K. Nakayama, M. Wadati, Motion of curves in the plane, J. Phys. Soc. Jpn. 62(2) (1993), 473–479
1993
-
[10]
Anco, H-R
S.C. Anco, H-R. Nayeri, E. Recio, Travelling wave solutions on a non-zero background for the gener- alized Korteweg–de Vries equation, J. Phys. A: Math. Theor. 54 (2021) 085701. 58
2021
-
[11]
Miura, C.S
R.M. Miura, C.S. Gardner, M.D. Kruskal, Kortewegde Vries Equation and Generalizations. II. Exis- tence of Conservation Laws and Constants of Motion, J. Math. Phys. 9 (1968), 1204–1209
1968
-
[12]
Anco, Conservation laws of scaling-invariant field equations, J
S.C. Anco, Conservation laws of scaling-invariant field equations, J. Phys. A: Math. Gen. 36 (2003), 8623–8638
2003
-
[13]
Guggenheimer,Differential Geometry, McGraw-Hill, 1963
H. Guggenheimer,Differential Geometry, McGraw-Hill, 1963
1963
-
[14]
Anco, Group-invariant soliton equations and bi-Hamiltonian geometric curve flows in Riemannian symmetric spaces, J
S.C. Anco, Group-invariant soliton equations and bi-Hamiltonian geometric curve flows in Riemannian symmetric spaces, J. Geom. Phys. 58 (2008), 1–37
2008
-
[15]
Ablowtiz, P.A
M.A. Ablowtiz, P.A. Clarkson,Solitons, Nonlinear Evolution Equations and Inverse Scattering, Cam- bridge University Press, 2010
2010
-
[16]
Olver,Applications of Lie Groups to Differential Equations, Springer-Verlag, New York, 1993
P.J. Olver,Applications of Lie Groups to Differential Equations, Springer-Verlag, New York, 1993
1993
-
[17]
Abramowitz, I
M. Abramowitz, I. Stegun,Handbook of Mathematical Functions, Applied Mathematics Series 55, National Bureau of Standards, 1964
1964
-
[18]
Mari Beffa, J.A
G. Mari Beffa, J.A. Sanders, J.-P. Wang, Integrable systems in three-dimensional Riemannian geome- try, J. Nonlinear Sci. 12 (2002), 143–167
2002
-
[19]
Dorfman,Dirac Structures and Integrability of Nonlinear Evolution Equations, John-Wiley, 1993
I. Dorfman,Dirac Structures and Integrability of Nonlinear Evolution Equations, John-Wiley, 1993. 59
1993
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.