Tight Bounds on Polynomials and Its Application to Dynamic Optimization Problems
Pith reviewed 2026-05-24 02:40 UTC · model grok-4.3
The pith
A pseudo-spectral method with flexible sub-intervals achieves tight polynomial bounds and lower costs for dynamic optimization problems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
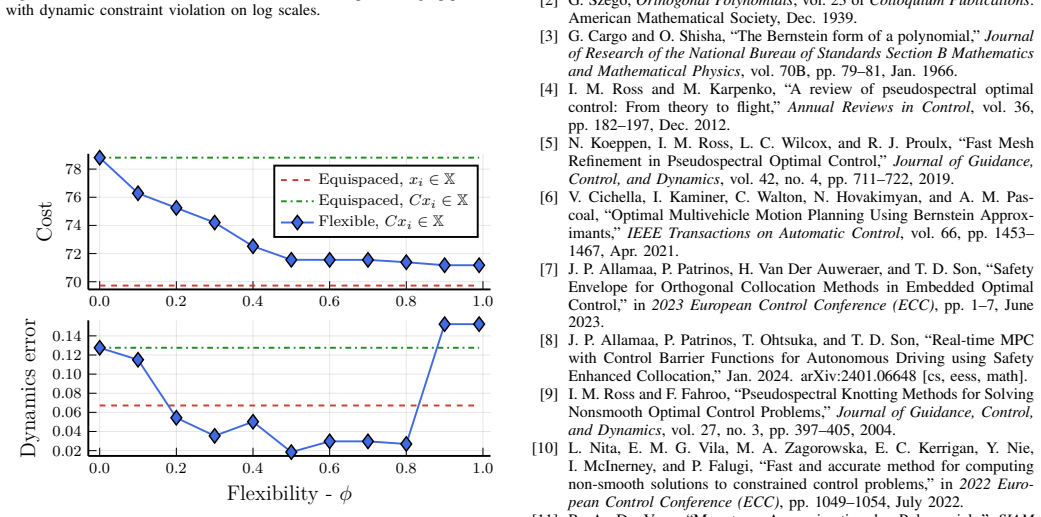
The paper claims that allowing flexible sub-intervals in the discretization enables tight polynomial bounds, which in turn rigorously enforces inequality constraints while permitting lower-cost solutions to dynamic optimization problems compared to non-flexible discretizations, as shown in two example optimal control problems.
What carries the argument
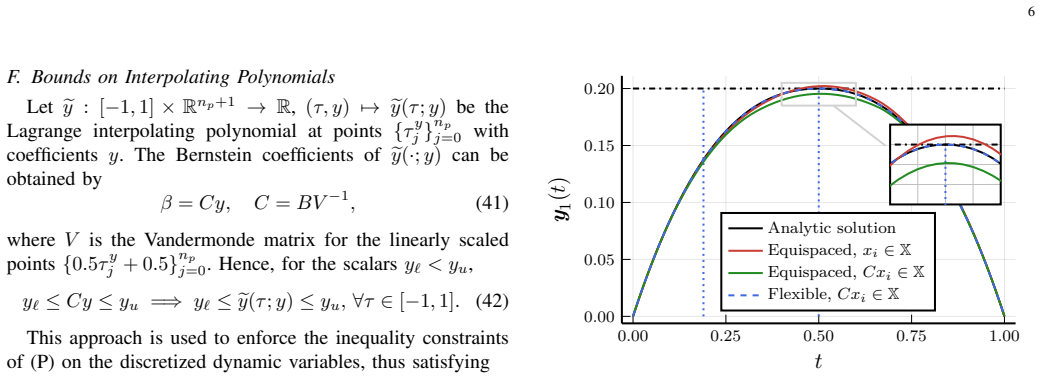
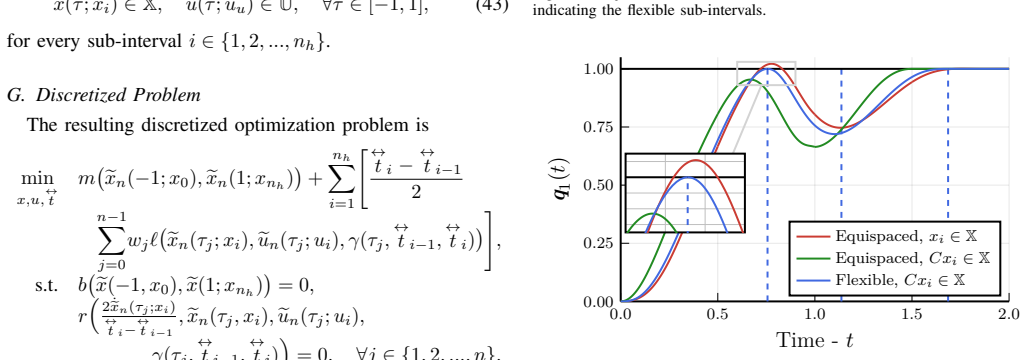
Flexible sub-intervals in pseudo-spectral discretization that tighten the bounds on the polynomial approximations.
If this is right
- Inequality constraints are enforced rigorously throughout the time horizon.
- Optimal solutions exhibit lower costs than those from fixed discretizations.
- The approach is feasible for solving optimal control problems, as verified in examples.
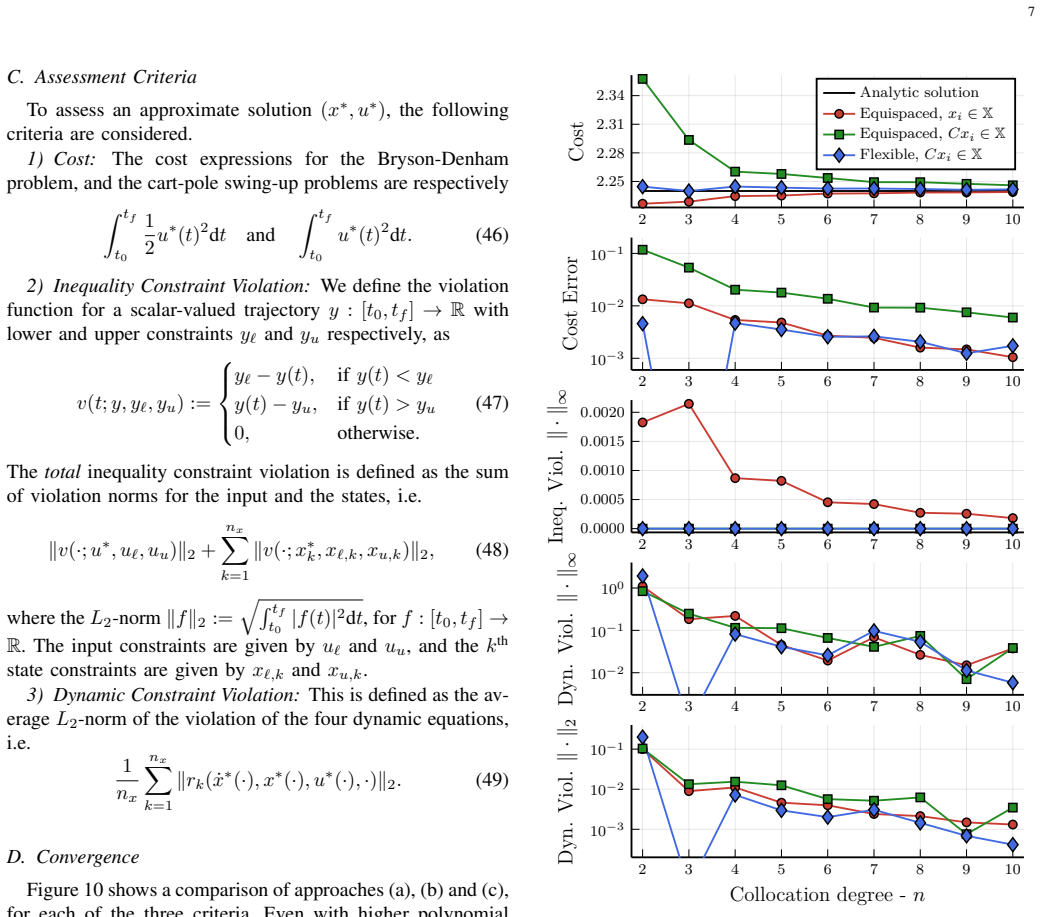
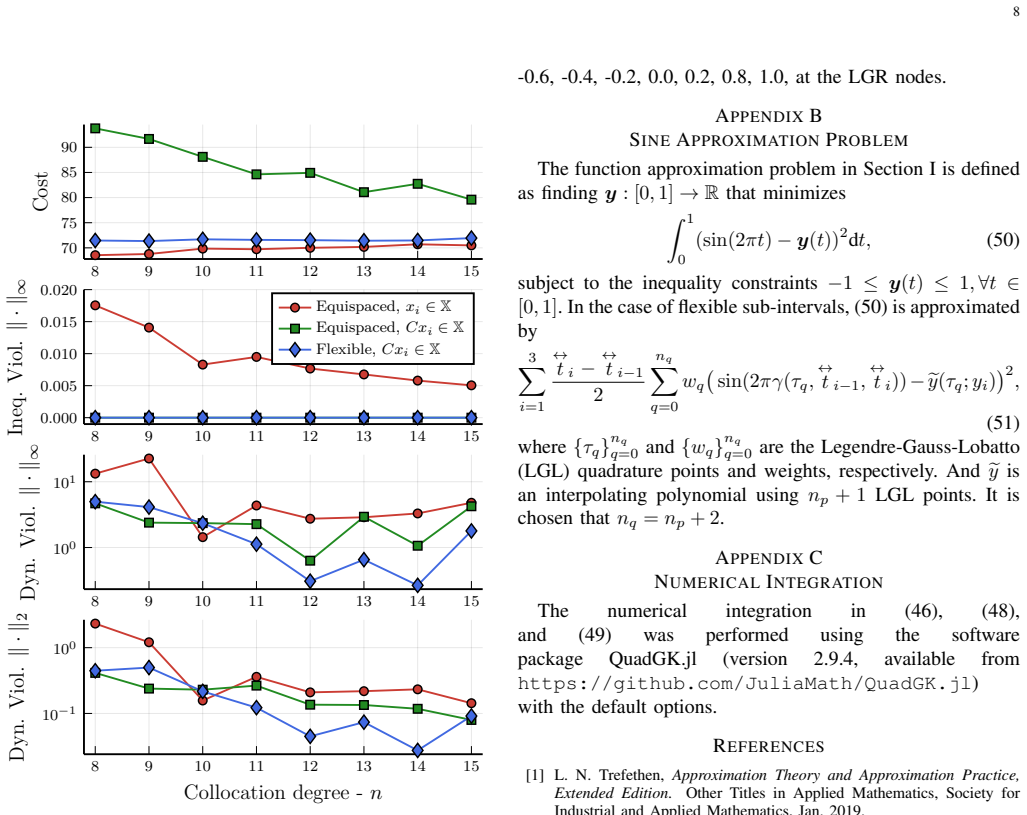
- Up to a tenfold reduction in relative cost is achievable.
Where Pith is reading between the lines
- The method might improve accuracy in problems with rapid state changes by concentrating intervals where needed.
- It could be combined with adaptive refinement strategies for even better performance.
- Broader adoption might reduce the need for conservative constraint margins in practical engineering designs.
Load-bearing premise
That flexible sub-intervals exist which keep the polynomial approximations stable and achieve the tight bounds without excessive computation or new violations.
What would settle it
A counterexample problem where no flexible sub-interval choice yields both the claimed tight bounds and the reported cost reduction while maintaining constraint satisfaction and numerical stability.
Figures

read the original abstract
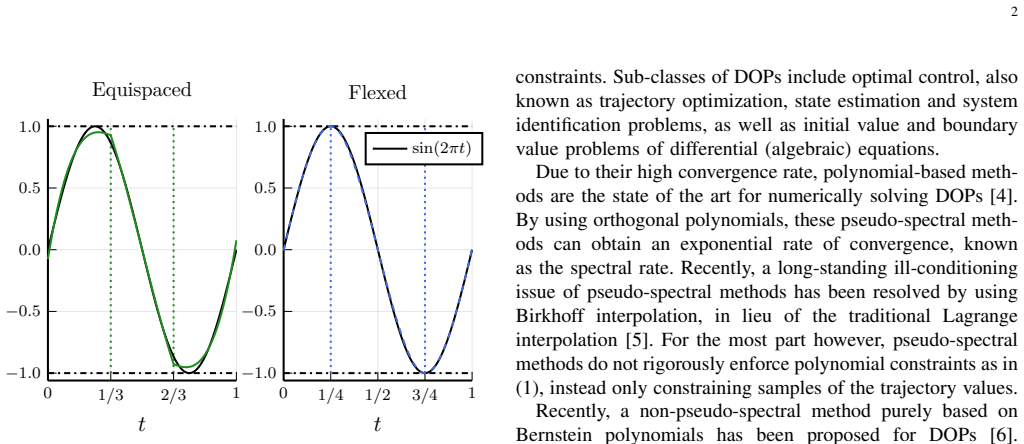
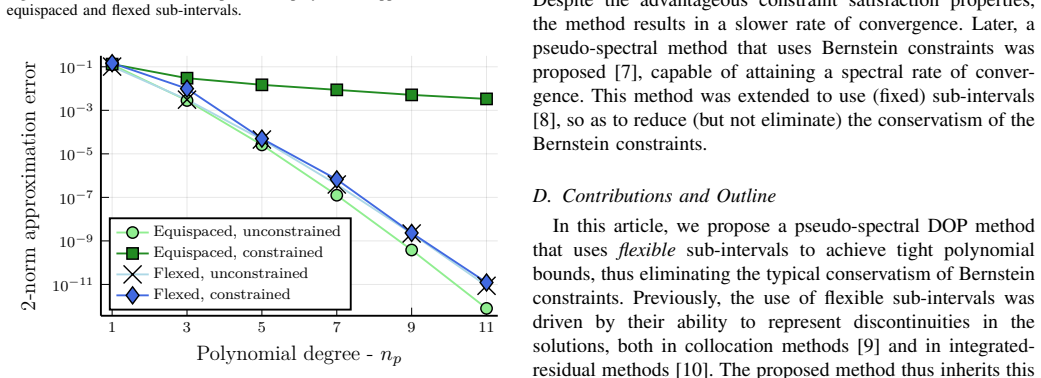
This paper presents a pseudo-spectral method for Dynamic Optimization Problems (DOPs) that allows for tight polynomial bounds to be achieved via flexible sub-intervals. The proposed method not only rigorously enforces inequality constraints, but also allows for a lower cost in comparison with non-flexible discretizations. Two examples are provided to demonstrate the feasibility of the proposed method to solve optimal control problems. Solutions to the example problems exhibited up to a tenfold reduction in relative cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a pseudo-spectral method for dynamic optimization problems that uses flexible sub-intervals to achieve tight polynomial bounds. It claims this approach rigorously enforces inequality constraints while yielding lower costs than fixed-grid discretizations, with two numerical examples demonstrating up to a tenfold reduction in relative cost.
Significance. If the flexible discretization can be shown to be stable and reproducible, the method could improve computational efficiency in optimal control by allowing adaptive partitioning that maintains constraint satisfaction and reduces objective values. The explicit credit for reproducible examples is noted, but the absence of a selection rule or convergence argument limits the assessed impact.
major comments (2)
- [Abstract and §3] Abstract and §3 (proposed method): the central claim of up to tenfold cost reduction and rigorous inequality enforcement rests on the ability to select flexible sub-intervals that keep polynomial approximations stable; no explicit selection criterion, convergence argument, or stability analysis is supplied, rendering the performance claims unverifiable from the given description.
- [Examples section] Examples section: the reported cost reductions are presented without accompanying error analysis, condition-number bounds, or comparison tables that isolate the effect of interval flexibility from other implementation choices, making it impossible to confirm that the savings are due to the proposed feature rather than problem-specific tuning.
minor comments (1)
- Notation for the polynomial basis and interval partitioning should be introduced with a single consistent table or figure to aid readability.
Simulated Author's Rebuttal
We thank the referee for the detailed comments. We address each major point below and indicate planned revisions.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (proposed method): the central claim of up to tenfold cost reduction and rigorous inequality enforcement rests on the ability to select flexible sub-intervals that keep polynomial approximations stable; no explicit selection criterion, convergence argument, or stability analysis is supplied, rendering the performance claims unverifiable from the given description.
Authors: We agree that an explicit selection rule and convergence discussion are needed for verifiability. In revision we will add to §3 a concrete sub-interval selection procedure based on local residual monitoring together with a short convergence argument referencing standard pseudo-spectral approximation theory. A complete stability analysis lies outside the paper’s scope and will be noted as a limitation. revision: partial
-
Referee: [Examples section] Examples section: the reported cost reductions are presented without accompanying error analysis, condition-number bounds, or comparison tables that isolate the effect of interval flexibility from other implementation choices, making it impossible to confirm that the savings are due to the proposed feature rather than problem-specific tuning.
Authors: We accept the criticism. The revised examples section will report approximation errors, condition numbers of the resulting linear systems, and a controlled comparison table that varies only the interval flexibility while holding all other discretization parameters fixed. revision: yes
Circularity Check
No derivation chain or equations visible; circularity assessment not possible
full rationale
The provided abstract and summary contain only a high-level description of a pseudo-spectral method for dynamic optimization problems using flexible sub-intervals to achieve tight polynomial bounds. No equations, derivation steps, fitted parameters, self-citations, or mathematical claims are present that could be inspected for self-definitional, fitted-input, or self-citation circularity. Without visible load-bearing steps or quotes from the paper's math, no circular reductions can be exhibited. This is the expected honest non-finding when the text supplies no derivation chain to analyze.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
L. N. Trefethen, Approximation Theory and Approximation Practice, Extended Edition . Other Titles in Applied Mathematics, Society for Industrial and Applied Mathematics, Jan. 2019
work page 2019
-
[2]
Szeg ˝o, Orthogonal Polynomials, vol
G. Szeg ˝o, Orthogonal Polynomials, vol. 23 of Colloquium Publications. American Mathematical Society, Dec. 1939
work page 1939
-
[3]
The Bernstein form of a polynomial,
G. Cargo and O. Shisha, “The Bernstein form of a polynomial,” Journal of Research of the National Bureau of Standards Section B Mathematics and Mathematical Physics , vol. 70B, pp. 79–81, Jan. 1966
work page 1966
-
[4]
A review of pseudospectral optimal control: From theory to flight,
I. M. Ross and M. Karpenko, “A review of pseudospectral optimal control: From theory to flight,” Annual Reviews in Control , vol. 36, pp. 182–197, Dec. 2012
work page 2012
-
[5]
Fast Mesh Refinement in Pseudospectral Optimal Control,
N. Koeppen, I. M. Ross, L. C. Wilcox, and R. J. Proulx, “Fast Mesh Refinement in Pseudospectral Optimal Control,” Journal of Guidance, Control, and Dynamics , vol. 42, no. 4, pp. 711–722, 2019
work page 2019
-
[6]
Optimal Multivehicle Motion Planning Using Bernstein Approx- imants,
V . Cichella, I. Kaminer, C. Walton, N. Hovakimyan, and A. M. Pas- coal, “Optimal Multivehicle Motion Planning Using Bernstein Approx- imants,” IEEE Transactions on Automatic Control , vol. 66, pp. 1453– 1467, Apr. 2021
work page 2021
-
[7]
Safety Envelope for Orthogonal Collocation Methods in Embedded Optimal Control,
J. P. Allamaa, P. Patrinos, H. Van Der Auweraer, and T. D. Son, “Safety Envelope for Orthogonal Collocation Methods in Embedded Optimal Control,” in 2023 European Control Conference (ECC) , pp. 1–7, June 2023
work page 2023
-
[8]
J. P. Allamaa, P. Patrinos, T. Ohtsuka, and T. D. Son, “Real-time MPC with Control Barrier Functions for Autonomous Driving using Safety Enhanced Collocation,” Jan. 2024. arXiv:2401.06648 [cs, eess, math]
-
[9]
Pseudospectral Knotting Methods for Solving Nonsmooth Optimal Control Problems,
I. M. Ross and F. Fahroo, “Pseudospectral Knotting Methods for Solving Nonsmooth Optimal Control Problems,” Journal of Guidance, Control, and Dynamics, vol. 27, no. 3, pp. 397–405, 2004
work page 2004
-
[10]
Fast and accurate method for computing non-smooth solutions to constrained control problems,
L. Nita, E. M. G. Vila, M. A. Zagorowska, E. C. Kerrigan, Y . Nie, I. McInerney, and P. Falugi, “Fast and accurate method for computing non-smooth solutions to constrained control problems,” in 2022 Euro- pean Control Conference (ECC) , pp. 1049–1054, July 2022
work page 2022
-
[11]
Monotone Approximation by Polynomials,
R. A. De V ore, “Monotone Approximation by Polynomials,” SIAM Journal on Mathematical Analysis , vol. 8, pp. 906–921, Oct. 1977
work page 1977
-
[12]
A. E. Bryson, Applied optimal control: optimization, estimation, and control. New York: Taylor and Francis, 1975
work page 1975
-
[13]
An Introduction to Trajectory Optimization: How to Do Your Own Direct Collocation,
M. Kelly, “An Introduction to Trajectory Optimization: How to Do Your Own Direct Collocation,”SIAM Review, vol. 59, pp. 849–904, Jan. 2017
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.