CycleTrajectory: An End-to-End Pipeline for Enriching and Analyzing GPS Trajectories to Understand Cycling Behavior and Environment
Pith reviewed 2026-05-23 23:56 UTC · model grok-4.3
The pith
CycleTrajectory pipeline enriches noisy GPS cycling tracks with OSM road details at 5.64 percent map-matching error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The CycleTrajectory pipeline processes high-sampling-rate GPS trajectories through data preparation, OSRM-based map matching, OSM integration, and variable calculation to add road infrastructure details, with map-matching validation yielding a 5.64 percent error rate that supports its use for analyzing cycling behavior and environment.
What carries the argument
The CycleTrajectory pipeline, which aligns GPS points to OSM road segments via the OSRM API before enrichment and metric calculation.
If this is right
- Enriched trajectories allow calculation of concrete metrics such as distance traveled, speed profiles, and usage of specific road infrastructure types.
- The workflow reduces storage and analysis overhead for large volumes of noisy GPS data by removing noise and adding semantics.
- The approach directly supports quantitative study of how cyclists interact with road environments at fine spatial scales.
- Low reported error makes the output suitable for applications in sustainable mobility research that rely on accurate road attribution.
Where Pith is reading between the lines
- The same sequence of steps could be tested on GPS data from other transport modes such as walking or e-scooters to check transferability.
- Aggregating the derived infrastructure-usage metrics across many users might reveal patterns in cycling route choice that are not visible in raw coordinates.
- If map-matching performance varies by city layout, future versions could add environment-specific tuning steps before the OSRM call.
- Combining the enriched outputs with external data layers such as traffic volume or air quality could extend the analysis to health or safety questions.
Load-bearing premise
The pipeline assumes the OSRM API can accurately match noisy, high-rate GPS points to OSM segments without large systematic errors in real-world urban or complex settings.
What would settle it
Running the pipeline on a new set of action-camera GPS tracks from dense urban areas with frequent intersections and reporting a map-matching error rate well above 5.64 percent would falsify the reliability claim.
Figures


read the original abstract
Global positioning system (GPS) trajectories recorded by mobile phones or action cameras offer valuable insights into sustainable mobility, as they provide fine-scale spatial and temporal characteristics of individual travel. However, the high volume, noise, and lack of semantic information in this data poses challenges for storage, analysis, and applications. To address these issues, we propose an end-to-end pipeline named CycleTrajectory for processing high-sampling rate GPS trajectory data from action cameras, leveraging OpenStreetMap (OSM) for semantic enrichment. The methodology includes (1) Data Preparation, which includes filtration, noise removal, and resampling; (2) Map Matching, which accurately aligns GPS points with road segments using the OSRM API; (3) OSM Data integration to enrich trajectories with road infrastructure details; and (4) Variable Calculation to derive metrics like distance, speed, and infrastructure usage. Validation of the map matching results shows an error rate of 5.64%, indicating the reliability of this pipeline. This approach enhances efficient GPS data preparation and facilitates a deeper understanding of cycling behavior and the cycling environment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents CycleTrajectory, an end-to-end pipeline for processing high-sampling-rate GPS trajectories from action cameras. It comprises four stages: (1) data preparation including filtration, noise removal, and resampling; (2) map matching via the OSRM API to align points with OSM road segments; (3) integration with OSM data for semantic enrichment of road infrastructure; and (4) calculation of metrics such as distance, speed, and infrastructure usage. The central empirical claim is that validation of the map-matching step yields a 5.64% error rate, supporting the pipeline's reliability for analyzing cycling behavior and environment.
Significance. If the 5.64% error rate is shown to be robust under the operating conditions of noisy, high-frequency action-camera data, the pipeline would provide a practical, open-tool-based workflow for semantic enrichment of GPS trajectories. This could support applied studies in sustainable mobility by enabling scalable analysis of cycling infrastructure usage without requiring proprietary map-matching software.
major comments (1)
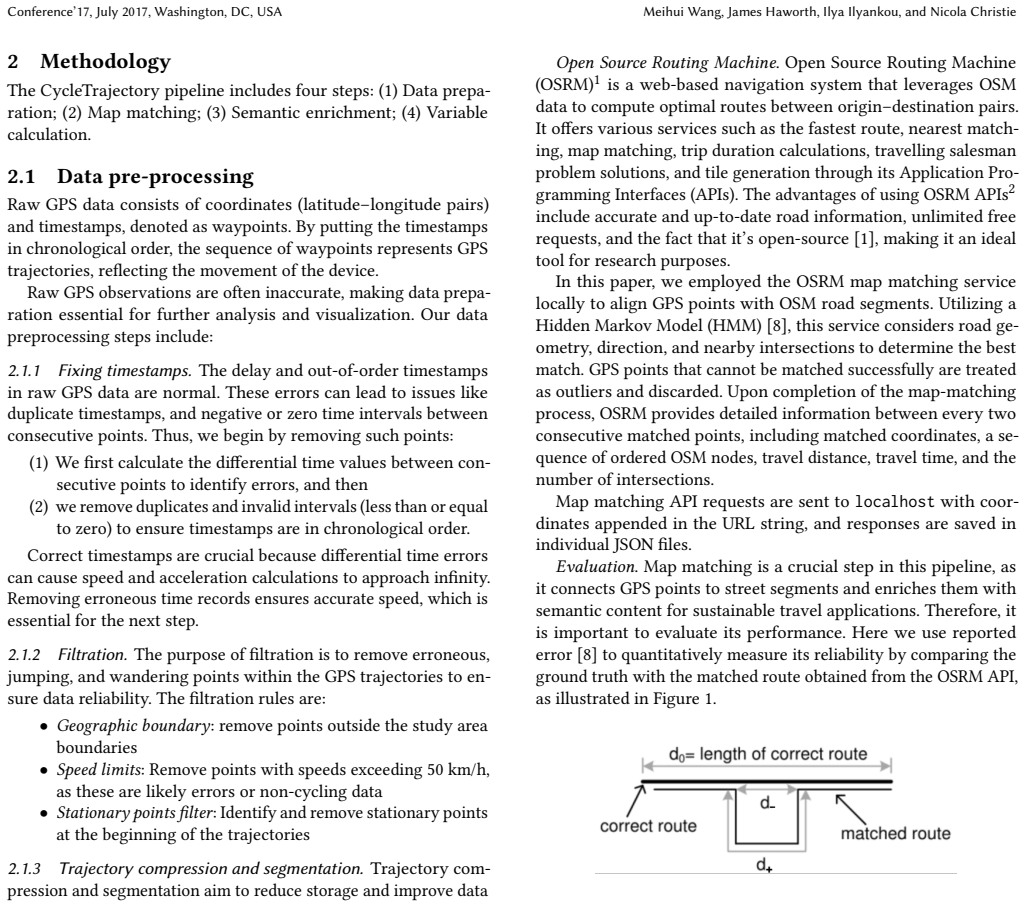
- [Abstract / Validation description] The validation claim in the abstract (and any corresponding results section) reports a 5.64% map-matching error rate yet supplies no information on ground-truth construction, test-set composition (e.g., number of trajectories, urban vs. rural coverage, sampling rates), error metric definition, baseline comparators, or sensitivity to post-processing steps. Because the pipeline's advertised reliability rests entirely on this single figure, the absence of these details prevents assessment of whether the error rate generalizes to the targeted high-sampling-rate, noisy action-camera regime.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. The single major comment highlights a genuine gap in the current manuscript regarding the validation of the 5.64% map-matching error rate. We address this point below and will revise the paper accordingly.
read point-by-point responses
-
Referee: [Abstract / Validation description] The validation claim in the abstract (and any corresponding results section) reports a 5.64% map-matching error rate yet supplies no information on ground-truth construction, test-set composition (e.g., number of trajectories, urban vs. rural coverage, sampling rates), error metric definition, baseline comparators, or sensitivity to post-processing steps. Because the pipeline's advertised reliability rests entirely on this single figure, the absence of these details prevents assessment of whether the error rate generalizes to the targeted high-sampling-rate, noisy action-camera regime.
Authors: We agree that the manuscript as submitted provides insufficient detail on the validation procedure, which limits evaluation of the reported error rate. In the revised version we will expand the validation section (and update the abstract) to explicitly describe: (1) ground-truth construction (manual annotation protocol and reference data sources for the evaluated trajectories), (2) test-set composition including the number of trajectories, their urban/rural distribution, and the range of sampling rates matching the action-camera regime, (3) the exact error metric (e.g., point-to-segment distance threshold or segment-level mismatch rate) that yields the 5.64% figure, (4) any baseline map-matching methods against which the OSRM-based approach was compared, and (5) sensitivity results with respect to the data-preparation and post-processing steps. These additions will directly address generalizability to noisy, high-frequency GPS data. revision: yes
Circularity Check
No circularity detected; pipeline relies on external components
full rationale
The paper describes an end-to-end processing pipeline (data prep, OSRM map matching, OSM enrichment, metric calculation) whose central reliability claim is an empirical 5.64% error rate on map matching. No equations, fitted parameters renamed as predictions, self-citations, or ansatzes appear in the provided text. The validation figure is presented as an external benchmark result rather than a quantity derived from the pipeline's own definitions or inputs. The derivation chain is therefore self-contained against external tools and does not reduce to any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Sina Dabiri, Nikola Marković, Kevin Heaslip, and Chandan K. Reddy. 2020. A deep convolutional neural network based approach for vehicle classification using large-scale GPS trajectory data. Transportation Research Part C: Emerging Technologies 116 (July 2020), 102644. https://doi.org/10.1016/j.trc.2020.102644
-
[2]
Jingwei Guo, Meihui Wang, Ilya Ilyankou, Natchapon Jongwiriyanurak, Xiaowei Gao, Nicola Christie, and James Haworth. 2024. Multiple Object Detection and Tracking in Panoramic Videos for Cycling Safety Analysis. http://arxiv.org/abs/ 2407.15199 arXiv:2407.15199 [cs]
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
Mohamed R Ibrahim, James Haworth, Nicola Christie, and Tao Cheng. 2021. CyclingNet: Detecting cycling near misses from video streams in complex urban scenes with deep learning. IET Intelligent Transport Systems 15, 10 (2021), 1331– 1344
work page 2021
-
[4]
George R Jagadeesh and Thambipillai Srikanthan. 2017. Online map-matching of noisy and sparse location data with hidden Markov and route choice models. IEEE Transactions on Intelligent Transportation Systems 18, 9 (2017), 2423–2434
work page 2017
-
[5]
Natchapon Jongwiriyanurak, Zichao Zeng, Meihui Wang, James Haworth, Gar- avig Tanaksaranond, and Jan Boehm. 2023. Framework for Motorcycle Risk Conference’17, July 2017, Washington, DC, USA Meihui Wang, James Haworth, Ilya Ilyankou, and Nicola Christie Shared lane Cycle track Separate cycleway Cycle lane Shared busway 0 5 10 15 20 Proportion of Time (%) T...
-
[6]
Cristiano Landi, Riccardo Guidotti, Mirco Nanni, and Anna Monreale. 2023. The Trajectory Interval Forest Classifier for Trajectory Classification. In Proceedings of the 31st ACM International Conference on Advances in Geographic Information Systems (Hamburg, Germany) (SIGSPATIAL ’23). Association for Computing Machinery, New York, NY, USA, Article 67, 4 p...
-
[7]
Xiaoliang Ma and Ding Luo. 2016. Modeling cyclist acceleration process for bicycle traffic simulation using naturalistic data. Transportation Research Part F: Traffic Psychology and Behaviour 40 (July 2016), 130–144. https://doi.org/10. 1016/j.trf.2016.04.009
work page 2016
-
[8]
Paul Newson and John Krumm. 2009. Hidden Markov map matching through noise and sparseness. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems . ACM, Seattle Wash- ington, 336–343. https://doi.org/10.1145/1653771.1653818
-
[9]
Siavash Saki and Tobias Hagen. 2022. A Practical Guide to an Open-Source Map-Matching Approach for Big GPS Data. SN Computer Science 3, 5 (Aug. 2022),
work page 2022
-
[10]
https://doi.org/10.1007/s42979-022-01340-5
-
[11]
Jillian Strauss and Luis F. Miranda-Moreno. 2017. Speed, travel time and delay for intersections and road segments in the Montreal network using cyclist Smart- phone GPS data. Transportation Research Part D: Transport and Environment 57 (Dec. 2017), 155–171. https://doi.org/10.1016/j.trd.2017.09.001
-
[12]
Zachary Vander Laan, Mark Franz, and Nikola Marković. 2021. Scalable Frame- work for Enhancing Raw GPS Trajectory Data: Application to Trip Analytics for Transportation Planning. Journal of Big Data Analytics in Transportation 3, 2 (Aug. 2021), 119–139. https://doi.org/10.1007/s42421-021-00040-5
-
[13]
Dawn Woodard, Galina Nogin, Paul Koch, David Racz, Moises Goldszmidt, and Eric Horvitz. 2017. Predicting travel time reliability using mobile phone GPS data. Transportation Research Part C: Emerging Technologies 75 (2017), 30–44
work page 2017
-
[14]
Hangbin Wu, Shengke Huang, Chen Fu, Shan Xu, Junhua Wang, Wei Huang, and Chun Liu. 2023. Online map-matching assisted by object-based classification of driving scenario. International Journal of Geographical Information Science 37, 8 (2023), 1872–1907
work page 2023
- [15]
-
[16]
Xianghui Zhang and Tao Cheng. 2023. The impacts of the COVID-19 pandemic on multimodal human mobility in London: A perspective of decarbonizing transport. Geo-spatial Information Science 26, 4 (2023), 703–715
work page 2023
-
[17]
Yingjie Zhang, Beibei Li, and Ramayya Krishnan. 2020. Learning individual behavior using sensor data: The case of global positioning system traces and taxi drivers. Information Systems Research 31, 4 (2020), 1301–1321
work page 2020
-
[18]
Yu Zheng. 2015. Trajectory Data Mining: An Overview. ACM Transactions on Intelligent Systems and Technology 6, 3 (May 2015), 1–41. https://doi.org/10.1145/ 2743025 Received 30 May 2024; accepted 20 September 2024
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.