Relative Pose Estimation for Nonholonomic Robot Formation with UWB-IO Measurements (Extended version)
Pith reviewed 2026-05-23 17:40 UTC · model grok-4.3
The pith
Relative pose estimation in local frames using only UWB and inertial odometry enables distributed formation control for nonholonomic robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
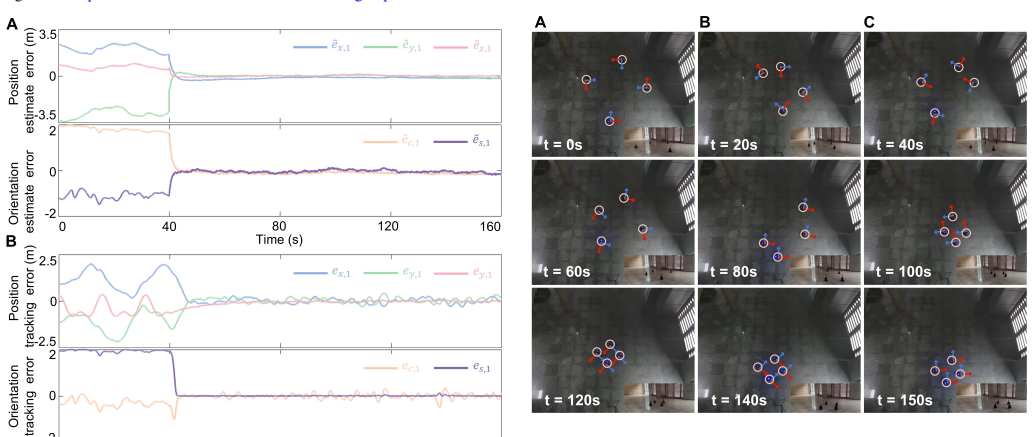
The paper establishes that a concurrent-learning estimator can recover both relative position and orientation between neighboring robots in each robot's local frame using only UWB ranging and inertial odometer measurements. A subsequent cooperative localization algorithm recovers the relative pose to the leader under directed communication. These estimates then support a distributed formation tracking controller for nonholonomic robots, with effectiveness demonstrated through 3D and 2D real-world experiments on aerial and grounded robots.
What carries the argument
The concurrent-learning based estimator, which uses UWB ranging and IO measurements to estimate relative position and orientation in a local frame.
Load-bearing premise
UWB distance measurements combined with each robot's local inertial odometer data contain sufficient information to uniquely determine relative positions and orientations between robots.
What would settle it
A scenario in which two robots move such that multiple relative orientations produce identical sequences of UWB distances and local IO readings, preventing unique estimation.
Figures











read the original abstract
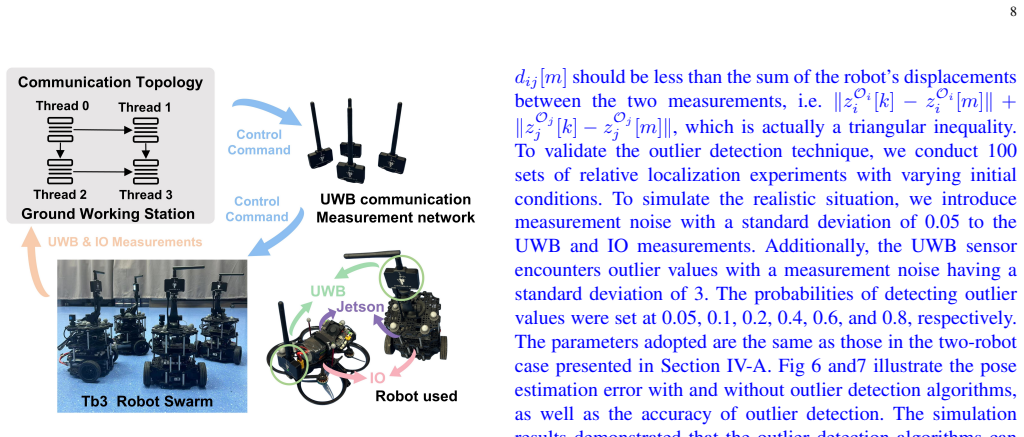
This article studies the problem of distributed formation control for multiple robots by using onboard ultra wide band (UWB) distance and inertial odometer (IO) measurements. Although this problem has been widely studied, a fundamental limitation of most works is that they require each robot's pose and sensor measurements are expressed in a common reference frame. However, it is inapplicable for nonholonomic robot formations due to the practical difficulty of aligning IO measurements of individual robot in a common frame. To address this problem, firstly, a concurrent-learning based estimator is firstly proposed to achieve relative localization between neighboring robots in a local frame. Different from most relative localization methods in a global frame, both relative position and orientation in a local frame are estimated with only UWB ranging and IO measurements. Secondly, to deal with information loss caused by directed communication topology, a cooperative localization algorithm is introduced to estimate the relative pose to the leader robot. Thirdly, based on the theoretical results on relative pose estimation, a distributed formation tracking controller is proposed for nonholonomic robots. Both 3D and 2D real-world experiments conducted on aerial robots and grounded robots are provided to demonstrate the effectiveness of the proposed method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses distributed formation control for nonholonomic robots using only onboard UWB ranging and inertial odometer (IO) measurements expressed in local frames. It proposes (i) a concurrent-learning estimator that recovers relative position and orientation between neighbors from UWB+IO data, (ii) a graph-theoretic cooperative localization step that recovers leader-relative pose under directed communication, and (iii) a distributed backstepping-style formation tracking controller. All components are supported by explicit state-space models, PE-based convergence arguments via Lyapunov analysis, and validated on real 2-D ground and 3-D aerial robot platforms.
Significance. If the derivations and experiments hold, the work removes a practical barrier in multi-robot systems by eliminating the need for a common reference frame or global alignment of IO data, which is especially relevant for nonholonomic platforms. The explicit state-space formulation, concurrent-learning update law with PE convergence proof, directed-graph cooperative estimator, and accompanying Lyapunov arguments together with real-robot validation constitute a complete, self-contained pipeline. These elements (model, proof, and hardware experiments) are strengths that increase the result's credibility within the field.
minor comments (3)
- Abstract contains a duplicated word: 'a concurrent-learning based estimator is firstly proposed to achieve relative localization... firstly, a concurrent-learning based estimator is firstly proposed'.
- Notation for the local-frame relative pose (position + orientation) and the leader-relative pose should be introduced with a single consistent symbol table or definition block early in §2 or §3 to avoid later ambiguity when the cooperative step is introduced.
- The experimental section would benefit from an explicit statement of the sampling rates of the UWB and IO sensors and the numerical values chosen for the concurrent-learning gains and PE excitation thresholds.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript on distributed formation control for nonholonomic robots using only local UWB and IO measurements. The recommendation for minor revision is appreciated, and we note that no specific major comments were raised in the report.
Circularity Check
No significant circularity identified
full rationale
The paper presents an explicit state-space model for relative pose from UWB+IO, a concurrent-learning estimator with PE condition and Lyapunov convergence proof, a directed-graph cooperative estimator, and a backstepping nonholonomic controller, all accompanied by 2-D/3-D hardware experiments. None of these components reduce by construction to fitted parameters renamed as predictions, self-citations that carry the central claim, or ansatzes imported from prior author work. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Formation control of networked mobile robots with unknown reference orientation,
J. Zhao, K. Zhu, H. Hu, X. Yu, X. Li, and H. Wang, “Formation control of networked mobile robots with unknown reference orientation,” IEEE- ASME Trans. Mechatron., vol. 28, no. 4, pp. 2200–2212, 2023
work page 2023
-
[2]
Time-varying formation planning and distributed control for multiple uavs in clutter environment,
K. Ze, W. Wang, K. Liu, and J. L ¨u, “Time-varying formation planning and distributed control for multiple uavs in clutter environment,” IEEE Trans. Ind. Electron., vol. 71, pp. 11 305–11 315, 2023
work page 2023
-
[3]
Massive shape formation in grid environments,
W. Chu, W. Zhang, H. Zhao, Z. Jin, and H. Mei, “Massive shape formation in grid environments,” IEEE Trans. Auto. Sci. Eng. , vol. 20, no. 3, pp. 1745–1759, Jul. 2023
work page 2023
-
[4]
Mean- shift exploration in shape assembly of robot swarms,
G. Sun, R. Zhou, Z. Ma, Y . Li, R. Groß, Z. Chen, and S. Zhao, “Mean- shift exploration in shape assembly of robot swarms,” Nat. Commun. , vol. 14, no. 1, p. 3476, Jun. 2023
work page 2023
-
[5]
Bearing-only formation tracking control of multiagent systems,
S. Zhao, Z. Li, and Z. Ding, “Bearing-only formation tracking control of multiagent systems,” IEEE Trans. Autom. Control , vol. 64, no. 11, pp. 4541–4554, 2019
work page 2019
-
[6]
Distributed localization in dynamic networks via complex laplacian,
X. Fang, L. Xie, and X. Li, “Distributed localization in dynamic networks via complex laplacian,” Automatica, vol. 151, p. 110915, 2023
work page 2023
-
[7]
H. Wang, X. Zhao, S. Huang, Q. Li, and Y . Liu, “A branch-and-bound based globally optimal solution to 2d multi-robot relative pose estimation problems,” Automatica, vol. 164, p. 111654, 2024
work page 2024
-
[8]
A bearing-angle approach for unknown target motion analysis based on visual measure- ments,
Z. Ning, Y . Zhang, J. Li, Z. Chen, and S. Zhao, “A bearing-angle approach for unknown target motion analysis based on visual measure- ments,” Int. J. Robot. Res. , p. 02783649241229172, 2024
work page 2024
-
[9]
Challenges for monocular 6d object pose estimation in robotics,
D. Bauer, P. H ¨onig, J.-B. Weibel, J. Garc´ıa-Rodr´ıguez, M. Vinczeet al., “Challenges for monocular 6d object pose estimation in robotics,” IEEE Transactions on Robotics , 2024
work page 2024
-
[10]
Relative transformation estimation based on fusion of odometry and uwb ranging data,
T. H. Nguyen and L. Xie, “Relative transformation estimation based on fusion of odometry and uwb ranging data,” IEEE Trans. Robot., vol. 39, no. 4, pp. 2861–2877, 2023
work page 2023
-
[11]
Relative docking and formation control via range and odometry measurements,
K. Cao, Z. Qiu, and L. Xie, “Relative docking and formation control via range and odometry measurements,” IEEE Trans. Control Netw. Syst. , vol. 7, no. 2, pp. 912–922, 2019
work page 2019
-
[12]
Persistently excited adaptive relative localization and time-varying formation of robot swarms,
T.-M. Nguyen, Z. Qiu, T. H. Nguyen, M. Cao, and L. Xie, “Persistently excited adaptive relative localization and time-varying formation of robot swarms,” IEEE Trans. Robot. , vol. 36, no. 2, pp. 553–560, 2019
work page 2019
-
[13]
K. Guo, X. Li, and L. Xie, “Ultra-wideband and odometry-based cooperative relative localization with application to multi-uav formation control,” IEEE T. Cybern. , vol. 50, no. 6, pp. 2590–2603, 2019
work page 2019
-
[14]
Distributed adaptive formation control of multi-agent systems with measurement noises,
Y . Liu and Z. Liu, “Distributed adaptive formation control of multi-agent systems with measurement noises,” Automatica, vol. 150, p. 110857, 2023
work page 2023
-
[15]
Estimating odometry scale and uwb anchor location based on semidefinite programming optimization,
T. H. Nguyen and L. Xie, “Estimating odometry scale and uwb anchor location based on semidefinite programming optimization,” IEEE Robot. Autom. Lett., vol. 7, no. 3, pp. 7359–7366, 2022
work page 2022
-
[16]
S. Chen, Y . Li, and W. Dong, “High-performance relative localization based on key-node seeking considering aerial drags using range and odometry measurements,” IEEE Trans. Ind. Electron. , 2023
work page 2023
-
[17]
Relative localization estimation for multiple robots via the rotating ultra-wideband tag,
J. Liu and G. Hu, “Relative localization estimation for multiple robots via the rotating ultra-wideband tag,” IEEE Robot. Autom. Lett. , 2023
work page 2023
-
[18]
Prescribed performance distance-based formation control of multi-agent systems,
F. Mehdifar, C. P. Bechlioulis, F. Hashemzadeh, and M. Baradarannia, “Prescribed performance distance-based formation control of multi-agent systems,” Automatica, vol. 119, p. 109086, 2020
work page 2020
-
[19]
J. Chen, B. Jayawardhana, and H. G. de Marina, “Distributed distance- based formation-motion control of unicycle agents without orientation measurements,” IEEE Trans. Control Netw. Syst. , 2024
work page 2024
-
[20]
Distributed localization for multi-agent systems with random noise based on iterative learning,
Y . Lv, H. Zhang, Z. Wang, and H. Yan, “Distributed localization for multi-agent systems with random noise based on iterative learning,” IEEE Trans. Neural Netw. Learn. Syst. , vol. 35, no. 1, pp. 952–960, 2022
work page 2022
-
[21]
Relative position estimation in multi-agent systems using attitude-coupled range measurements,
M. Shalaby, C. C. Cossette, J. R. Forbes, and J. Le Ny, “Relative position estimation in multi-agent systems using attitude-coupled range measurements,” IEEE Robot. Autom. Lett., vol. 6, no. 3, pp. 4955–4961, 2021
work page 2021
-
[22]
Optimal multi-robot formations for relative pose estimation using range measurements,
C. C. Cossette, M. A. Shalaby, D. Saussi ´e, J. Le Ny, and J. R. Forbes, “Optimal multi-robot formations for relative pose estimation using range measurements,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2022, pp. 2431–2437
work page 2022
-
[23]
Multi- robot relative pose estimation and imu preintegration using passive uwb transceivers,
M. A. Shalaby, C. C. Cossette, J. Le Ny, and J. R. Forbes, “Multi- robot relative pose estimation and imu preintegration using passive uwb transceivers,” IEEE Trans. Robot. , 2024
work page 2024
-
[24]
Ranging-based localizability optimization for mobile robotic networks,
J. Cano and J. Le Ny, “Ranging-based localizability optimization for mobile robotic networks,” IEEE Trans. Robot., vol. 39, no. 4, pp. 2842– 2860, 2023
work page 2023
-
[25]
Concurrent-learning based relative localization in shape formation of robot swarms,
J. L ¨u, K. Ze, S. Yue, K. Liu, W. Wang, and G. Sun, “Concurrent-learning based relative localization in shape formation of robot swarms,” IEEE Trans. Auto. Sci. Eng. , vol. 22, pp. 11 188–11 204, 2025
work page 2025
-
[26]
B. Jiang, B. D. Anderson, and H. Hmam, “3-d relative localization of mobile systems using distance-only measurements via semidefinite optimization,” IEEE Trans. Aerosp. Electron. Syst. , vol. 56, no. 3, pp. 1903–1916, 2019
work page 1903
-
[27]
Asymp- totically efficient estimator for range-based robot relative localization,
Y . Wang, M. Lin, X. Xie, Y . Gao, F. Deng, and T. L. Lam, “Asymp- totically efficient estimator for range-based robot relative localization,” IEEE-ASME Trans. Mechatron., vol. 28, no. 6, pp. 3525–3536, 2023
work page 2023
-
[28]
Observer-based trajectory tracking control of nonholonomic wheeled mobile robots,
L. Yan, B. Ma, Y . Jia, and Y . Jia, “Observer-based trajectory tracking control of nonholonomic wheeled mobile robots,” IEEE Trans. Control Syst. Technol., 2024
work page 2024
-
[29]
Y . Zou, L. Zhong, W. He, and C. Silvestre, “Leader–follower cir- cumnavigation control of non-holonomic robots using distance-related information,” Automatica, vol. 169, p. 111831, 2024
work page 2024
-
[30]
Concurrent learning for convergence in adaptive control without persistency of excitation,
G. Chowdhary and E. Johnson, “Concurrent learning for convergence in adaptive control without persistency of excitation,” in in Proc. 49th IEEE Conf. Decis. Control (CDC) . IEEE, 2010, pp. 3674–3679
work page 2010
-
[31]
Gradient-based discrete-time concurrent learning for standalone function approximation,
O. Djaneye-Boundjou and R. Ord ´o˜nez, “Gradient-based discrete-time concurrent learning for standalone function approximation,”IEEE Trans. Autom. Control, vol. 65, no. 2, pp. 749–756, 2019
work page 2019
-
[32]
Concurrent learning adaptive control of linear systems with noisy measurements,
M. M ¨uhlegg, G. Chowdhary, and E. Johnson, “Concurrent learning adaptive control of linear systems with noisy measurements,” in AIAA Guidance, Navigation, and Control Conference , 2012, p. 4669
work page 2012
-
[33]
Similar formation control via range and odometry measurements,
K. Cao, M. Cao, and L. Xie, “Similar formation control via range and odometry measurements,” IEEE T. Cybern. , 2023
work page 2023
-
[34]
Self-organizing nervous systems for robot swarms,
W. Zhu, S. O ˘guz, M. K. Heinrich, M. Allwright, M. Wahby, A. L. Chris- tensen, E. Garone, and M. Dorigo, “Self-organizing nervous systems for robot swarms,” Science Robotics, vol. 9, no. 96, p. eadl5161, 2024
work page 2024
-
[35]
Similar formation control via range and odometry measurements,
K. Cao, M. Cao, and L. Xie, “Similar formation control via range and odometry measurements,” IEEE Transactions on Cybernetics , 2023
work page 2023
-
[36]
Three-dimensional bearing-only target following via observability-enhanced helical guid- ance,
J. Li, Z. Ning, S. He, C.-H. Lee, and S. Zhao, “Three-dimensional bearing-only target following via observability-enhanced helical guid- ance,” IEEE Trans. Robot. , vol. 39, no. 2, pp. 1509–1526, 2022
work page 2022
-
[37]
Concurrent-learning based relative localization in shape formation of robot swarms,
J. L ¨u, K. Ze, S. Yue, K. Liu, W. Wang, and G. Sun, “Concurrent-learning based relative localization in shape formation of robot swarms,” arXiv preprint arXiv:2410.06052, 2024
-
[38]
S. Zhu, K. Lv, Z. Yang, C. Chen, and X. Guan, “Bearing-based formation tracking control of nonholonomic mobile agents with a persistently exciting leader,” IEEE Trans. Control Netw. Syst. , vol. 11, no. 1, pp. 307–318, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.