Towards Generative Location Awareness for Disaster Response: A Probabilistic Cross-view Geolocalization Approach
Pith reviewed 2026-05-16 20:52 UTC · model grok-4.3
The pith
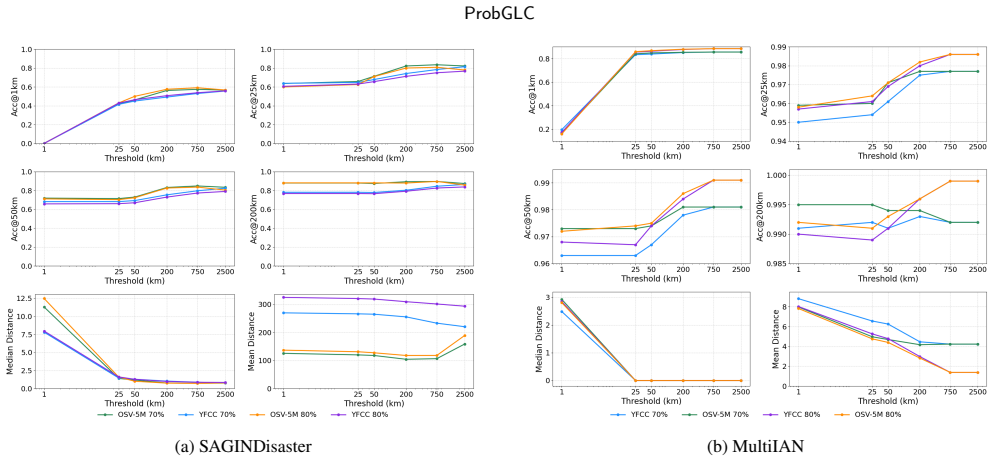
ProbGLC unifies probabilistic and deterministic models to reach 0.86 accuracy at 1 km and 0.97 at 25 km on cross-view disaster images while adding uncertainty estimates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ProbGLC unifies probabilistic and deterministic geolocalization models into a single framework that delivers state-of-the-art accuracy on cross-view disaster imagery while providing probabilistic distributions for uncertainty quantification and localizability scores for model explainability.
What carries the argument
The ProbGLC unified framework that merges probabilistic distributions and localizability scores with deterministic geolocalization for both precision and uncertainty reporting.
If this is right
- Higher location precision supports more targeted allocation of emergency resources during events such as wildfires and floods.
- Probabilistic outputs give responders explicit measures of confidence to guide decisions under uncertainty.
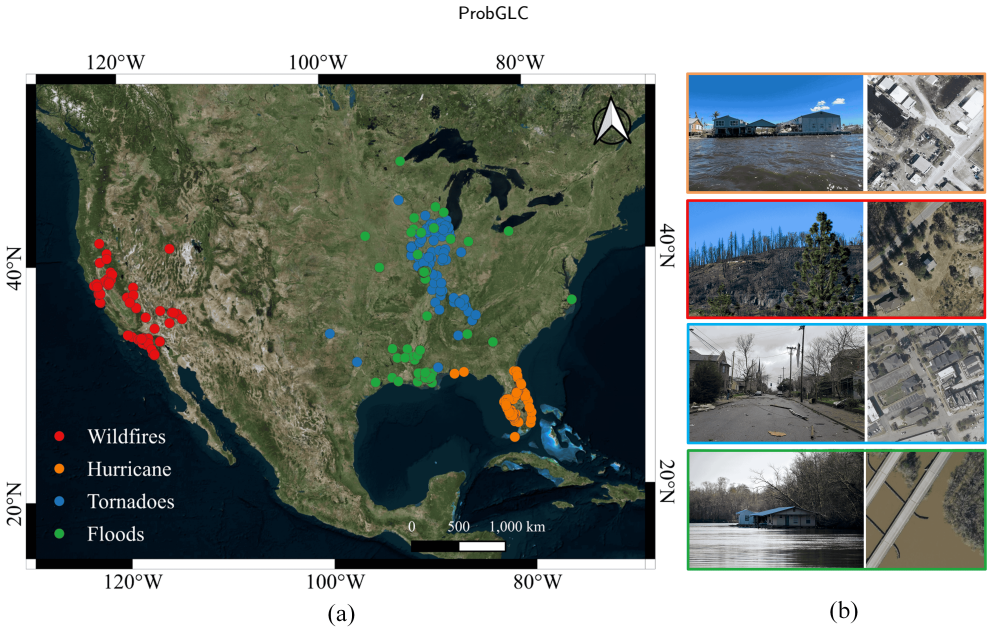
- The method applies across multiple disaster categories including hurricanes, tornadoes, and flooding.
- Public release of the code and datasets allows direct replication and extension for operational disaster systems.
Where Pith is reading between the lines
- Pairing the localizability scores with live satellite feeds could support near-real-time updating of disaster maps.
- The uncertainty estimates might be used to flag ambiguous locations for rapid human review in the field.
- Adapting the framework to sequential imagery could track how disaster footprints evolve hour by hour.
Load-bearing premise
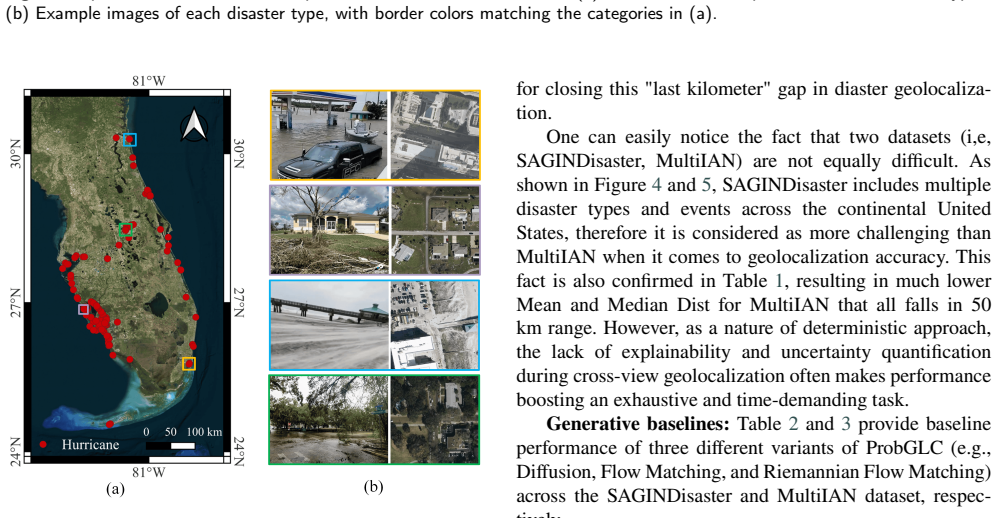
That combining probabilistic and deterministic models will simultaneously improve both accuracy and explainability without introducing new failure modes on real-world disaster imagery not represented in the MultiIAN and SAGAINDisaster datasets.
What would settle it
Testing on new cross-view images from an unseen disaster event where accuracy falls below 0.7 at 1 km or where localizability scores show no correlation with actual localization errors would disprove the central performance claim.
Figures




read the original abstract
As Earth's climate changes, it is impacting disasters and extreme weather events across the planet. Record-breaking heat waves, drenching rainfalls, extreme wildfires, and widespread flooding during hurricanes are all becoming more frequent and more intense. Rapid and efficient response to disaster events is essential for climate resilience and sustainability. A key challenge in disaster response is to accurately and quickly identify disaster locations to support decision-making and resources allocation. In this paper, we propose a Probabilistic Cross-view Geolocalization approach, called ProbGLC, exploring new pathways towards generative location awareness for rapid disaster response. Herein, we combine probabilistic and deterministic geolocalization models into a unified framework to simultaneously enhance model explainability (via uncertainty quantification) and achieve state-of-the-art geolocalization performance. Designed for rapid diaster response, the ProbGLC is able to address cross-view geolocalization across multiple disaster events as well as to offer unique features of probabilistic distribution and localizability score. To evaluate the ProbGLC, we conduct extensive experiments on two cross-view disaster datasets (i.e., MultiIAN and SAGAINDisaster), consisting diverse cross-view imagery pairs of multiple disaster types (e.g., hurricanes, wildfires, floods, to tornadoes). Preliminary results confirms the superior geolocalization accuracy (i.e., 0.86 in Acc@1km and 0.97 in Acc@25km) and model explainability (i.e., via probabilistic distributions and localizability scores) of the proposed ProbGLC approach, highlighting the great potential of leveraging generative cross-view approach to facilitate location awareness for better and faster disaster response. The data and code is publicly available at https://github.com/bobleegogogo/ProbGLC
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Probabilistic Cross-view Geolocalization approach (ProbGLC) that combines probabilistic and deterministic models in a unified framework for rapid disaster response. It claims to achieve state-of-the-art geolocalization accuracy (0.86 Acc@1km, 0.97 Acc@25km) on MultiIAN and SAGAINDisaster datasets while providing explainability through probabilistic distributions and localizability scores. The work emphasizes generative location awareness and releases code and data publicly.
Significance. This research has potential significance for climate resilience by improving location identification in disaster scenarios with both high accuracy and uncertainty awareness. The fusion approach and the correlation of localizability scores with error distances, along with ablation studies, add value if the results are robust. Public code availability is a positive aspect for the field.
major comments (1)
- §4.2: The ablation study shows gains from the probabilistic component, but without reported variance or multiple random seeds, it is difficult to confirm the consistency of the improvements across runs.
minor comments (3)
- Abstract: Spelling error: 'diaster' should be 'disaster'.
- Abstract: Grammatical error: 'Preliminary results confirms' should be 'Preliminary results confirm'.
- §3.1: The description of the localizability score could benefit from a clearer mathematical definition or reference to an equation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for minor revision. We address the single major comment below and will update the manuscript accordingly.
read point-by-point responses
-
Referee: §4.2: The ablation study shows gains from the probabilistic component, but without reported variance or multiple random seeds, it is difficult to confirm the consistency of the improvements across runs.
Authors: We agree that reporting variance across multiple random seeds would strengthen the ablation results. In the revised version we have rerun all ablation experiments in §4.2 with five independent random seeds and now report both mean performance and standard deviation for each configuration. The gains from the probabilistic component remain statistically consistent (standard deviations ≤ 0.03 across all metrics), confirming the robustness of the reported improvements. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces ProbGLC as a novel unified framework that combines existing probabilistic and deterministic geolocalization components for cross-view disaster imagery. No derivation equations are presented that reduce any claimed prediction or performance metric back to fitted parameters by construction, nor does the central claim rely on a self-citation chain for uniqueness or ansatz. Evaluation metrics (Acc@1km, Acc@25km, localizability scores) are reported against external datasets with public code, making the results independently verifiable rather than tautological. The approach is framed as an empirical combination rather than a re-derivation of prior quantities.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
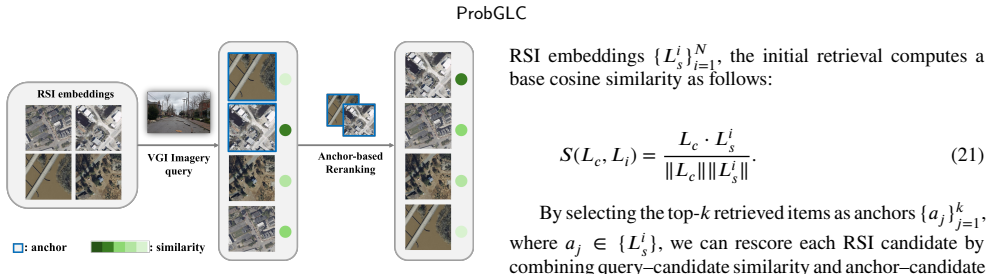
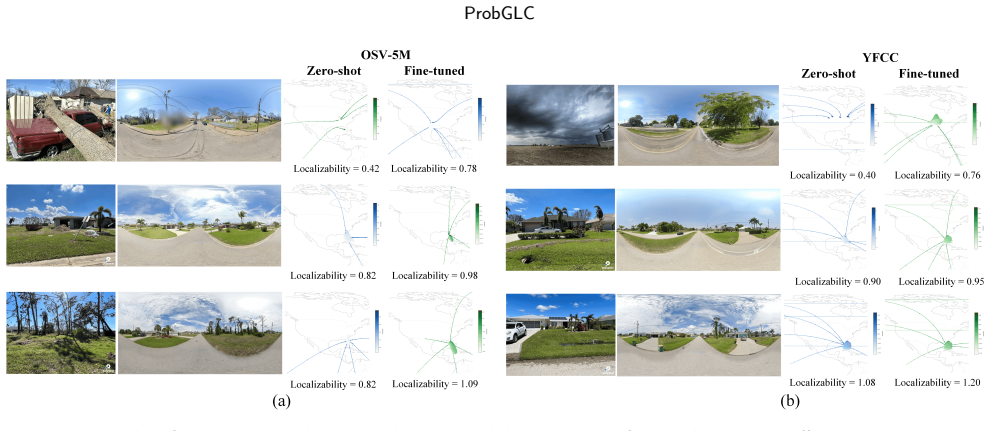
Riemannian Flow Matching on the Sphere … log P(x_n | c) … Localizability(c) = ∫ p(x_n | c) log² P(x_n | c) d x_n
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Acc@1 km = 0.86 … probabilistic distribution and localizability scores
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 4 Pith papers
-
InfoGeo: Information-Theoretic Object-Centric Learning for Cross-View Generalizable UAV Geo-Localization
InfoGeo reformulates cross-view geo-localization as an information bottleneck that aligns object-centric structural relations across views while minimizing view-specific noise.
-
InfoGeo: Information-Theoretic Object-Centric Learning for Cross-View Generalizable UAV Geo-Localization
InfoGeo applies an information bottleneck to object-centric learning for improved cross-view generalization in UAV geo-localization.
-
InfoGeo: Information-Theoretic Object-Centric Learning for Cross-View Generalizable UAV Geo-Localization
InfoGeo reformulates cross-view geo-localization as an information bottleneck that aligns object-centric structural relations while suppressing view-specific noise, outperforming prior methods on benchmarks.
-
Unbox Responsible GeoAI: Navigating Climate Extreme and Disaster Mapping
Responsible GeoAI for disaster mapping requires governance across data, applications, and society rather than algorithm improvements alone.
Reference graph
Works this paper leans on
-
[1]
Recent trends challenges and limitations of explainable ai in remote sensing, in: Proceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, pp. 8199–8205. Hsu,C.Y.,Li,W.,2023.Explainablegeoai:cansaliencymapshelpinterpret artificial intelligence’s learning process? an empirical study on natural feature detection. International Jo...
-
[2]
Journal of spatial information science , 1–17
Geoai for science and the science of geoai. Journal of spatial information science , 1–17. Li, Z., 2025. Explainable ai in spatial analysis. arXiv preprint arXiv:2505.00591 . Lin, T.Y., Cui, Y., Belongie, S., Hays, J., 2015. Learning deep representa- tions for ground-to-aerial geolocalization, in: Proceedings of the IEEE conference on computer vision and ...
-
[3]
Harnessingaiandroboticsinhumanitarianassistanceanddisaster response. Science robotics 8, eadj2767. Marvi, M.T., 2020. A review of flood damage analysis for a building structure and contents. Natural Hazards 102, 967–995. Metropolis, N., Ulam, S., 1949. The monte carlo method. Journal of the American statistical association 44, 335–341. Nguyen, A., Yosinsk...
work page 2020
-
[4]
Exploring disaster impacts on adaptation actions in 549 cities worldwide. Nature communications 13, 3360. Oquab,M.,Darcet,T.,Moutakanni,T.,Vo,H.,Szafraniec,M.,Khalidov,V., Fernandez,P.,Haziza,D.,Massa,F.,El-Nouby,A.,etal.,2024. Dinov2: Learning robust visual features without supervision. Transactions on Machine Learning Research 1, 1–32. Radford, A., Kim,...
-
[5]
Deep Unsupervised Learning using Nonequilibrium Thermodynamics
Deepunsupervisedlearningusingnonequilibriumthermodynam- ics. CoRR abs/1503.03585. URL: http://arxiv.org/abs/1503.03585, arXiv:1503.03585. Srivastava,N.,Hinton,G.,Krizhevsky,A.,Sutskever,I.,Salakhutdinov,R., 2014.Dropout:asimplewaytopreventneuralnetworksfromoverfitting. The journal of machine learning research 15, 1929–1958. Thomee, B., Shamma, D.A., Fried...
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[6]
Benchmarking representation learning for natural world image collections, in: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 12884–12893. Vivanco Cepeda, V., Nayak, G.K., Shah, M., 2023. Geoclip: Clip-inspired alignment between locations and images for effective worldwide geo- localization. Advances in Neural Inform...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.