Stable Language Guidance for Vision-Language-Action Models
Pith reviewed 2026-05-16 16:18 UTC · model grok-4.3
The pith
Residual Semantic Steering keeps vision-language-action models robust to changes in instruction phrasing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
RSS approximates the semantic posterior via Monte Carlo Syntactic Integration driven by LLM distributional expansion and applies Residual Affordance Steering to isolate language influence by subtracting the visual prior, thereby maximizing action-intent mutual information and suppressing visual distractors.
What carries the argument
Residual Semantic Steering (RSS), a dual-stream probabilistic decoder that subtracts the visual affordance prior after Monte Carlo approximation of the semantic posterior.
If this is right
- Performance on manipulation benchmarks remains stable under adversarial rephrasings of instructions.
- Mutual information between generated actions and underlying intent increases while visual distractors are suppressed.
- The framework generalizes across diverse robotic control tasks without requiring task-specific retraining.
- Explicit isolation of language effects provides a template for handling modality imbalance in other control models.
Where Pith is reading between the lines
- The residual subtraction technique could transfer to other multimodal systems where one input type dominates decision-making.
- Deployment on physical robots would reveal whether the offline LLM approximations remain accurate under real-time sensor noise.
- Extending the Monte Carlo expansion to include visual variations might further stabilize performance in cluttered scenes.
Load-bearing premise
That Monte Carlo sampling of syntactic variants accurately captures the true semantic posterior and that subtracting the visual prior removes only distractors without discarding essential action information.
What would settle it
Measuring whether RSS-equipped models lose performance on held-out adversarial perturbations that differ in structure from those used to validate the posterior approximation.
Figures








read the original abstract
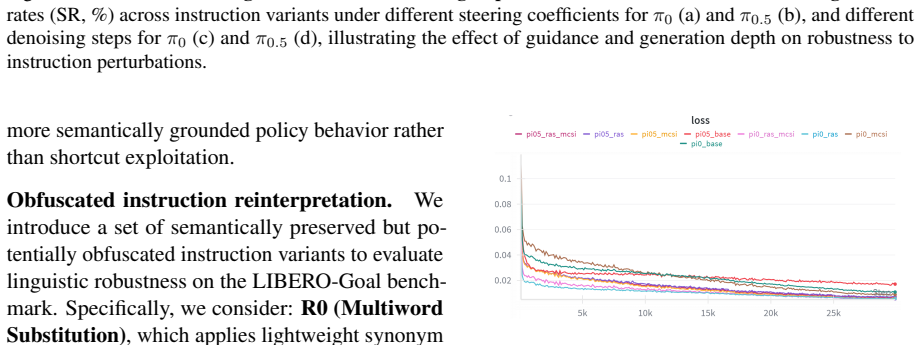
Vision-Language-Action (VLA) models have demonstrated impressive capabilities in generalized robotic control; however, they remain notoriously brittle to linguistic perturbations. We identify a critical ``modality collapse'' phenomenon where strong visual priors overwhelm sparse linguistic signals, causing agents to overfit to specific instruction phrasings while ignoring the underlying semantic intent. To address this, we propose Residual Semantic Steering (RSS), a probabilistic framework that disentangles physical affordance from semantic execution. RSS introduces two theoretical innovations: (1) Monte Carlo Syntactic Integration, which approximates the true semantic posterior via dense, LLM-driven distributional expansion, and (2) Residual Affordance Steering, a dual-stream decoding mechanism that explicitly isolates the causal influence of language by subtracting the visual affordance prior. Theoretical analysis suggests that RSS effectively maximizes the mutual information between action and intent while suppressing visual distractors. Empirical results across diverse manipulation benchmarks demonstrate that RSS achieves state-of-the-art robustness, maintaining performance even under adversarial linguistic perturbations. We release our code at https://github.com/Doo-mon/RSS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper identifies a 'modality collapse' phenomenon in Vision-Language-Action (VLA) models, where strong visual priors overwhelm sparse linguistic signals and cause overfitting to specific instruction phrasings. It proposes Residual Semantic Steering (RSS) as a probabilistic framework with two innovations: Monte Carlo Syntactic Integration to approximate the semantic posterior via LLM-driven distributional expansion, and Residual Affordance Steering via dual-stream decoding that subtracts the visual affordance prior to isolate causal language influence. Theoretical analysis claims RSS maximizes mutual information between action and intent while suppressing visual distractors, and empirical results on manipulation benchmarks show state-of-the-art robustness to adversarial linguistic perturbations.
Significance. If the disentanglement is valid and the robustness gains are attributable to the proposed mechanism rather than artifacts of the subtraction or sampling, the work would address a central brittleness in VLA models and enable more reliable robotic control under varied natural-language instructions.
major comments (3)
- [Abstract] Abstract: the claim that RSS 'maximizes the mutual information between action and intent' is not supported by an explicit derivation; the mutual-information quantity appears defined directly in terms of the fitted dual-stream parameters, raising the possibility of circularity.
- [Abstract] Abstract: Monte Carlo Syntactic Integration is asserted to approximate the true semantic posterior, yet no error bounds, convergence analysis, or faithfulness guarantees are supplied for the sampled distribution when linguistic signals are sparse.
- [Abstract] Abstract: Residual Affordance Steering subtracts the visual affordance prior to isolate language influence; because visual and linguistic cues are typically correlated in VLA training data, the subtraction risks discarding shared affordance information required for correct action execution, which would undermine attribution of any observed robustness gains.
minor comments (1)
- [Abstract] The term 'modality collapse' is introduced without a formal definition or citation to related phenomena in multimodal learning.
Simulated Author's Rebuttal
We thank the referee for their insightful comments, which have helped us improve the clarity and rigor of our work. Below we address each major comment point by point.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that RSS 'maximizes the mutual information between action and intent' is not supported by an explicit derivation; the mutual-information quantity appears defined directly in terms of the fitted dual-stream parameters, raising the possibility of circularity.
Authors: We appreciate this observation. The abstract condenses the theoretical contribution from Section 3.2, where we provide an explicit derivation showing that the RSS objective is equivalent to maximizing the mutual information I(action; intent) via a variational approximation that avoids circularity by grounding the intent distribution in the LLM-expanded posterior. To address the concern, we will revise the abstract to explicitly reference this derivation and clarify that the MI is not defined circularly but derived from the information-theoretic objective. revision: yes
-
Referee: [Abstract] Abstract: Monte Carlo Syntactic Integration is asserted to approximate the true semantic posterior, yet no error bounds, convergence analysis, or faithfulness guarantees are supplied for the sampled distribution when linguistic signals are sparse.
Authors: We agree that additional analysis on the approximation quality is warranted. In the revised manuscript, we will include a convergence analysis for the Monte Carlo integration, providing error bounds based on the number of samples and the coverage of the LLM-generated distribution. We will also add empirical results demonstrating the faithfulness of the approximation even under sparse linguistic inputs. revision: yes
-
Referee: [Abstract] Abstract: Residual Affordance Steering subtracts the visual affordance prior to isolate language influence; because visual and linguistic cues are typically correlated in VLA training data, the subtraction risks discarding shared affordance information required for correct action execution, which would undermine attribution of any observed robustness gains.
Authors: This is an important point regarding potential information loss due to correlations. Our dual-stream architecture is designed such that the visual prior is computed independently, and the residual operation isolates the incremental effect of language without removing shared components, as validated by our ablations where RSS performs comparably or better on unperturbed instructions. We will expand the discussion in the revised paper to explicitly address this correlation concern and include additional experiments quantifying the preserved affordance information. revision: yes
Circularity Check
No significant circularity; claims rest on empirical benchmarks rather than definitional reduction.
full rationale
The paper introduces RSS via two components (Monte Carlo Syntactic Integration and Residual Affordance Steering) and states that theoretical analysis suggests maximization of mutual information between action and intent. No equations are supplied in the manuscript excerpt that define any quantity in terms of itself or rename a fitted parameter as a prediction. The central robustness claim is tied to benchmark results under perturbations, not to a self-referential derivation or self-citation chain. The subtraction step is presented as an explicit design choice rather than a quantity forced by prior definitions. This is the normal case of an independent modeling proposal whose validity is left to external validation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Visual affordance prior can be subtracted from the joint prediction to isolate language causal influence
- standard math Monte Carlo sampling from LLM-driven expansions approximates the true semantic posterior
invented entities (1)
-
modality collapse
no independent evidence
Forward citations
Cited by 3 Pith papers
-
Learning Physics from Pretrained Video Models: A Multimodal Continuous and Sequential World Interaction Models for Robotic Manipulation
PhysGen uses video models to learn physics for robots, outperforming baselines by up to 13.8% on Libero and matching specialized models in real-world tasks.
-
Robotic Manipulation is Vision-to-Geometry Mapping ($f(v) \rightarrow G$): Vision-Geometry Backbones over Language and Video Models
Vision-geometry backbones using pretrained 3D world models outperform vision-language and video models for robotic manipulation by enabling direct mapping from visual input to geometric actions.
-
OOWM: Structuring Embodied Reasoning and Planning via Object-Oriented Programmatic World Modeling
OOWM models the world as an explicit symbolic tuple with UML diagrams and trains via SFT plus GRPO to outperform text-based CoT on embodied planning benchmarks.
Reference graph
Works this paper leans on
-
[1]
Fine-Tuning Vision-Language-Action Models: Optimizing Speed and Success
Fine-tuning vision-language-action models: Optimizing speed and success.arXiv preprint arXiv:2502.19645. Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag San- keti, and 1 others. 2024. Openvla: An open- source vision-language-action model.arXiv preprint arXiv:2406.0...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[2]
FAST: Efficient Action Tokenization for Vision-Language-Action Models
Octo: An open-source generalist robot policy. InFirst Workshop on Vision-Language Models for Navigation and Manipulation at ICRA 2024. OpenAI. 2025. Chatgpt. https://chat.openai. com/. Version 5.2. Abby O’Neill, Abdul Rehman, Abhiram Maddukuri, Abhishek Gupta, Abhishek Padalkar, Abraham Lee, Acorn Pooley, Agrim Gupta, Ajay Man- dlekar, Ajinkya Jain, and 1...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
mathcalE0: Enhancing generalization and fine-grained control in vla models via continuized discrete diffusion.arXiv preprint arXiv:2511.21542. Qingqing Zhao, Yao Lu, Moo Jin Kim, Zipeng Fu, Zhuoyang Zhang, Yecheng Wu, Zhaoshuo Li, Qianli Ma, Song Han, Chelsea Finn, and 1 others. 2025. Cot-vla: Visual chain-of-thought reasoning for vision-language-action m...
-
[4]
Put the wine bottle on top of the cabinet
The text has minimal impact on the action rank- ing. Case 2: Residual Steering (γ >1) SNRrss = |γW ⊤ l ψ(l)| |W ⊤v ϕ(o)| =γ·SNR std (18) A.4 Conclusion By choosing γ≫1 , we linearly amplify the lin- guistic contribution without altering the visual af- fordance landscape. Effectively, we synthesize a new weight vector ˜Wl =γW l, artificially restoring the ...
work page 2023
-
[5]
When you get a second, go ahead and open the cabinet's middle drawer
-
[6]
Before worrying about anything else on the table, open the middle drawer of the cabinet
-
[7]
Just to get things ready, pull open the top-middle drawer in the cabinet
-
[8]
If you're already facing the cabinet, open its middle drawer now
-
[9]
Take a quick look at the cabinet and open the drawer in the middle
-
[10]
Without moving any items around, simply open the cabinet's middle drawer
-
[11]
After you orient yourself, slide the cabinet's middle drawer open
-
[12]
To keep things organized, open the middle drawer of the cabinet first
-
[13]
Even if it feels like a small step, open the middle drawer on the cabinet
-
[14]
Put the wine bottle on top of the cabinet
Once you're in position, open the middle drawer of the cabinet carefully. Please paraphrase the core instruction: "Put the wine bottle on top of the cabinet. " into 10 different variations.Make each version longer and more human-like by adding conversational fillers, environmental context, or specific execution tips. The core task (opening that specific d...
-
[15]
When you have a moment, place the wine bottle on top of the cabinet
-
[16]
Even if it's not used right now, set the wine bottle on the cabinet's top surface
-
[17]
To clear some space, put the wine bottle up on top of the cabinet
-
[18]
Carefully lift the wine bottle and rest it on the cabinet's top
-
[19]
Without changing anything else, move the wine bottle onto the cabinet top
-
[20]
If you're done looking around, go ahead and place the wine bottle on top of the cabinet
-
[21]
For a tidier setup, put the wine bottle on the top of the cabinet
-
[22]
Take it slow—set the wine bottle on the cabinet's upper surface
-
[23]
Just as a small organizing step, place the wine bottle on top of the cabinet
-
[24]
Once you've got a steady hold, put the wine bottle on the cabinet top. Figure 8:R1-Distraction.The instruction is augmented with task-irrelevant conversational or contextual content, such as background descriptions or auxiliary remarks, while keeping the core action and target unchanged. 16 Please paraphrase the core instruction: "Put the bowl on the stov...
-
[25]
Place the concave container meant for holding ingredients onto the surface associated with applying cooking heat
-
[26]
Set the rounded vessel used for mixing or serving onto the appliance top where heat is generated for food preparation
-
[27]
Move the open-topped food container onto the flat heating platform used to warm cookware
-
[28]
Position the small, curved receptacle for food on the area designated for cooking and temperature control
-
[29]
Transfer the ingredient-holding vessel onto the heater-topped cooking apparatus
-
[30]
Rest the container with an interior cavity for liquids and solids onto the primary cooking surface
-
[31]
Put the mixing/serving receptacle onto the heat-providing cooking station's upper plane
-
[32]
Place the concave dish-like container on the top surface where burners deliver thermal energy
-
[33]
Set the food-holding vessel on the cooking appliance's heating region
-
[34]
Open the top drawer and put the bowl inside
Move the round receptacle intended to contain food onto the heated cooking platform. Please paraphrase the core instruction: "Open the top drawer and put the bowl inside. " into 10 different variations. Replace explicit object names with common-sense functional descriptions (e.g., changing "plate" to "a flat container for food") to challenge the model's i...
-
[35]
Unseal the highest pull-out compartment and place the concave food container within its interior space
-
[36]
Slide open the uppermost storage bay, then deposit the ingredient-holding vessel into that compartment
-
[37]
Open the top sliding chamber and move the rounded receptacle for food into the drawer cavity
-
[38]
Expose the upper pull-out compartment, then place the open-topped container inside the storage space
-
[39]
Pull out the uppermost compartment and store the curved food vessel within it
-
[40]
Open the highest sliding section of the storage unit, then insert the concave container into the interior
-
[41]
Extend the top pull-out compartment and place the mixing/serving receptacle into it
-
[42]
Open the upper storage chamber and put the bowl-shaped vessel inside the compartment
-
[43]
Slide the topmost compartment outward and position the food-holding container within the drawer space
-
[44]
Put the bowl on top of the cabinet
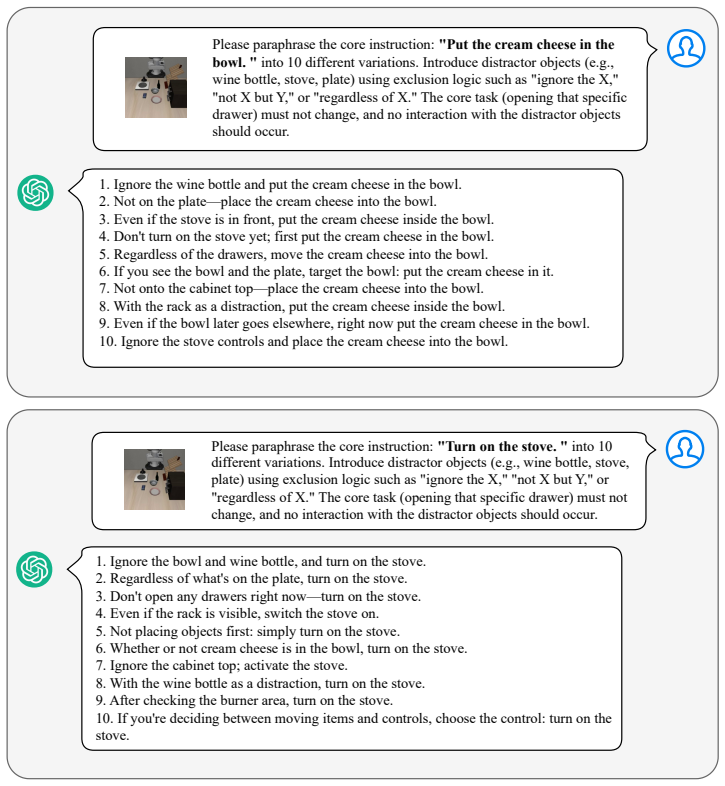
Open the highest drawer-like compartment and transfer the concave receptacle into the interior. Figure 9:R2-Common Sense.Object names are replaced with commonsense-based descriptive phrases that implicitly convey their functional or physical properties. Although the task intent remains unchanged, this variant requires the model to extract relevant semanti...
-
[45]
Locate the cabinet's top surface, then lift and place the bowl onto that top area
-
[46]
Ensure the bowl is stable, then set it down on top of the cabinet
-
[47]
Pick up the bowl, move it above the cabinet, and lower it onto the cabinet top
-
[48]
Goal-state: the bowl should end up resting on the cabinet top surface
-
[49]
Align the bowl with the cabinet top, then place it down gently to avoid sliding
-
[50]
If the bowl is elsewhere, transfer it to the cabinet top and confirm placement
-
[51]
Put the bowl on the cabinet top and verify it is not on the table afterward
-
[52]
Move the bowl to the highest surface of the cabinet, then release it once steady
-
[53]
Identify the cabinet, then place the bowl on its topmost surface
-
[54]
Bring the bowl to the cabinet top and make sure the bowl remains on that surface
-
[55]
Identify the stove's front edge, then push the plate until it reaches that front position
-
[56]
Ensure the plate stays on the stove surface while you push it forward to the front
-
[57]
Push the plate forward in a straight line until it is clearly at the front of the stove
-
[58]
Goal-state: the plate should end up at the stove's front—push it until that condition is met
-
[59]
Align your push direction toward the stove's front, then move the plate forward without tipping
-
[60]
If the plate is not at the front, nudge it forward and confirm its final position is front- of-stove
-
[61]
Push the plate toward the front edge, stopping once it's closest to you on the stove
-
[62]
Move the plate forward; verify it is nearer the front than before
-
[63]
Push the plate and check that it ends up positioned at the stove's front area
-
[64]
Push the plate to the front of the stove
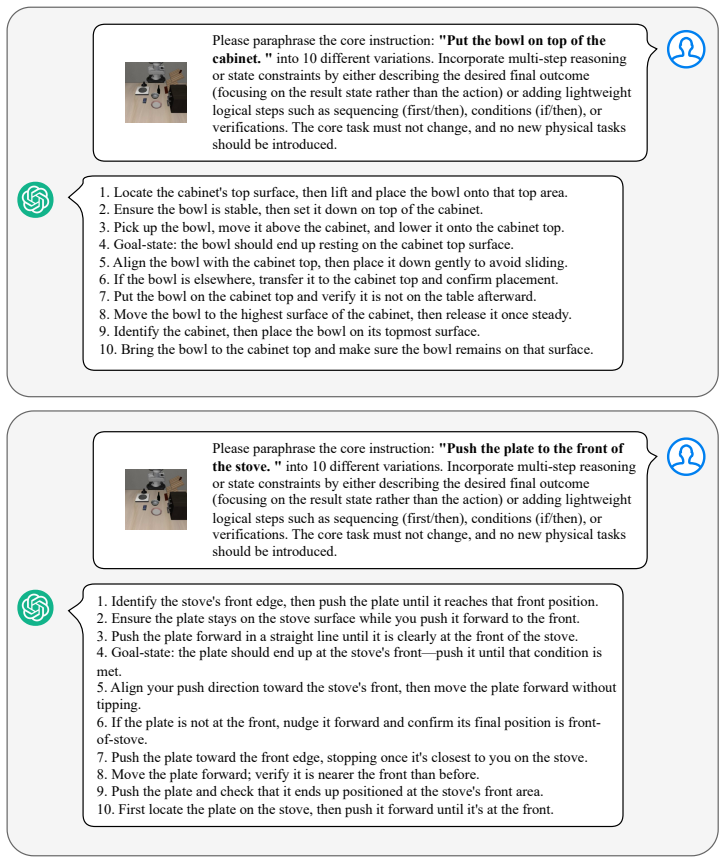
First locate the plate on the stove, then push it forward until it's at the front. Please paraphrase the core instruction: "Push the plate to the front of the stove. " into 10 different variations. Incorporate multi-step reasoning or state constraints by either describing the desired final outcome (focusing on the result state rather than the action) or a...
-
[65]
Ignore the wine bottle and put the cream cheese in the bowl
-
[66]
Not on the plate—place the cream cheese into the bowl
-
[67]
Even if the stove is in front, put the cream cheese inside the bowl
-
[68]
Don't turn on the stove yet; first put the cream cheese in the bowl
-
[69]
Regardless of the drawers, move the cream cheese into the bowl
-
[70]
If you see the bowl and the plate, target the bowl: put the cream cheese in it
-
[71]
Not onto the cabinet top—place the cream cheese into the bowl
-
[72]
With the rack as a distraction, put the cream cheese inside the bowl
-
[73]
Even if the bowl later goes elsewhere, right now put the cream cheese in the bowl
-
[74]
Ignore the stove controls and place the cream cheese into the bowl
-
[75]
Ignore the bowl and wine bottle, and turn on the stove
-
[76]
Regardless of what's on the plate, turn on the stove
-
[77]
Don't open any drawers right now—turn on the stove
-
[78]
Even if the rack is visible, switch the stove on
-
[79]
Not placing objects first: simply turn on the stove
-
[80]
Whether or not cream cheese is in the bowl, turn on the stove
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.