Encirclement Guaranteed Finite-Time Capture against Unknown Evader Strategies
Pith reviewed 2026-05-25 06:59 UTC · model grok-4.3
The pith
Pursuers can force finite-time capture of an evader while always keeping it inside their convex hull, without knowing its heading.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
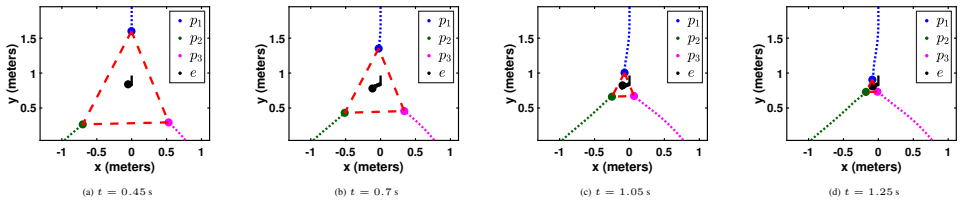
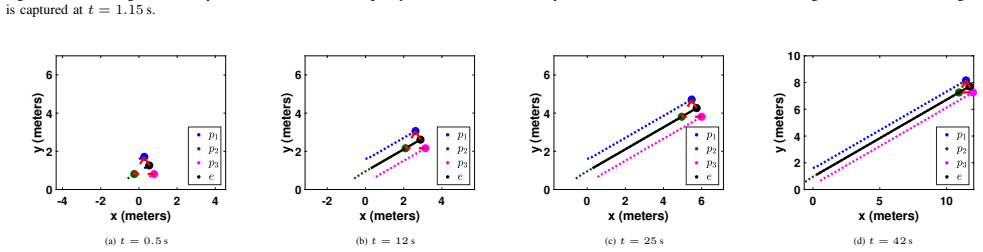
The authors present a class of strategies for the pursuers that guarantee capture in finite time while maintaining encirclement, irrespective of the evader's strategy. They also derive an upper bound on the time to capture.
What carries the argument
Class of pursuer strategies that maintain the evader inside the convex hull of pursuer positions while driving to finite-time capture.
If this is right
- The evader remains enclosed in the pursuer convex hull for the entire duration until capture.
- Capture is guaranteed to occur in finite time no matter what strategy the evader selects.
- An explicit upper bound exists on the time required for capture.
- Numerical simulations confirm the strategies succeed against multiple different evader behaviors.
Where Pith is reading between the lines
- The position-only requirement could allow implementation on agents with limited sensing that cannot measure velocities or headings.
- The time bound might be used to plan team sizes or energy budgets for real-world pursuit tasks.
- The same convex-hull maintenance idea could be tested in bounded domains or with moving obstacles.
Load-bearing premise
Pursuers have continuous access to the positions of the evader and each other but receive no information on the evader's heading angle.
What would settle it
An explicit evader trajectory that either exits the pursuers' convex hull before capture or forces capture time to exceed the derived upper bound when pursuers apply the proposed strategies.
Figures







read the original abstract
We consider a pursuit-evasion scenario involving a group of pursuers and a single evader in a two-dimensional unbounded environment. The pursuers aim to capture the evader in finite time while ensuring the evader remains enclosed within the convex hull of their positions until capture, without knowledge of the evader's heading angle. Prior works have addressed the problem of encirclement and capture separately in different contexts. In this paper, we present a class of strategies for the pursuers that guarantee capture in finite time while maintaining encirclement, irrespective of the evader's strategy. Furthermore, we derive an upper bound on the time to capture. Numerical results highlight the effectiveness of the proposed framework against a range of evader strategies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper considers a pursuit-evasion game in the unbounded plane with multiple pursuers and one evader. Pursuers have access only to relative positions (no headings) and must drive the evader to capture in finite time while keeping the evader inside the convex hull of the pursuers at every instant, for any evader strategy. The central contribution is a class of pursuer strategies together with an explicit upper bound on capture time; numerical simulations illustrate performance against several evader behaviors.
Significance. If the stated guarantees hold, the work supplies a unified treatment of encirclement and finite-time capture that had previously been handled separately. The explicit time bound and the position-only sensing model are concrete strengths that could be useful for multi-agent coordination under limited information.
minor comments (3)
- [§3] §3, the definition of the convex-hull condition (Eq. 3) is stated only for the continuous-time trajectories; a brief remark on how the condition is preserved under the sampled-data implementation used in the simulations would remove ambiguity.
- [Theorem 1] The upper-bound expression in Theorem 1 depends on the initial diameter of the pursuer set; the paper should state explicitly whether this quantity is assumed known to the pursuers or is only an a-posteriori quantity used in the analysis.
- [Figure 4] Figure 4 caption lists four evader strategies but the legend in the figure itself uses different labels; harmonizing the notation would improve readability.
Simulated Author's Rebuttal
We thank the referee for the careful reading, positive summary of the contribution, and recommendation of minor revision. No major comments were provided in the report, so we have no specific points requiring response or revision at this stage.
Circularity Check
No significant circularity; derivation combines independent prior results
full rationale
The provided abstract and context state that encirclement and capture were addressed separately in prior works, with the present paper combining them into a new class of strategies plus an explicit upper bound on capture time. No equations, self-citations, or fitted parameters are shown that reduce any claimed prediction or guarantee to its own inputs by construction. The central result is presented as a novel synthesis under standard position-only sensing assumptions, with no load-bearing self-citation chains or ansatz smuggling visible. This is the expected honest non-finding for a paper whose core claim rests on external prior results rather than internal redefinition.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The pursuers and evader follow continuous-time kinematic models in 2D plane.
- domain assumption Pursuers can obtain real-time position information of the evader and fellow pursuers.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We adopt the following conventions... area Ajk... ˙Ajk = Tp + Te... Theorem 1... vj dek sin φj + vk dej sin φk ≥ djk µm
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Lyapunov function V = Σ ∥pi − e∥... ˙V ≤ −n(1−µm)... tc ≤ (V0 − n rc)/n(1−µm)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
V . Jankovi´c, “About a man and lions,” Matematiˇ cki V esnik, vol. 2, no. 64, pp. 359–362, 1978
work page 1978
-
[3]
Model predictive control for the dynamic encirclement of a target,
A. J. Marasco, S. N. Givigi, and C. A. Rabbath, “Model predictive control for the dynamic encirclement of a target,” in American control conference (ACC), 2012, pp. 2004–2009
work page 2012
-
[4]
k-Capture in multiagent pursuit evasion, or the lion and the hyenas,
S. D. Bopardikar and S. Suri, “k-Capture in multiagent pursuit evasion, or the lion and the hyenas,” Theoretical Computer Science , vol. 522, pp. 13–23, 2014
work page 2014
-
[5]
Multi-player pursuit–evasion games with one superior evader,
J. Chen, W. Zha, Z. Peng, and D. Gu, “Multi-player pursuit–evasion games with one superior evader,” Automatica, vol. 71, pp. 24–32, 2016
work page 2016
-
[6]
Cooperative containment of a high- speed evader,
E. Garcia and S. D. Bopardikar, “Cooperative containment of a high- speed evader,” in American control conference (ACC), 2021, pp. 4698– 4703
work page 2021
-
[7]
Distributed encirclement and capture of multiple pursuers with collision avoidance,
X. Wang, L. Xi, Y . Ding, and B. M. Chen, “Distributed encirclement and capture of multiple pursuers with collision avoidance,” IEEE Transactions on Industrial Electronics , vol. 71, pp. 7520–7530, 2023
work page 2023
-
[8]
3D cooperative pursuit with guaranteed enclosure via robust model predictive control,
D. Patra and A. R. Hota, “3D cooperative pursuit with guaranteed enclosure via robust model predictive control,” in American Control Conference (ACC), 2025, pp. 2–7
work page 2025
-
[9]
Guaranteed decentralized pursuit-evasion in the plane with multiple pursuers,
H. Huang, W. Zhang, J. Ding, D. M. Stipanovi ´c, and C. J. Tomlin, “Guaranteed decentralized pursuit-evasion in the plane with multiple pursuers,” in IEEE Conference on Decision and Control and European Control Conference, 2011, pp. 4835–4840
work page 2011
-
[10]
Cooperative pursuit with voronoi partitions,
Z. Zhou, W. Zhang, J. Ding, H. Huang, D. M. Stipanovi ´c, and C. J. Tomlin, “Cooperative pursuit with voronoi partitions,” Automatica, vol. 72, pp. 64–72, 2016
work page 2016
-
[11]
Cooperative target capture using voronoi region shaping,
G. Kumar and A. Ratnoo, “Cooperative target capture using voronoi region shaping,” Journal of Guidance, Control, and Dynamics , vol. 48, no. 6, pp. 1428–1438, 2025
work page 2025
-
[12]
Distributed cooperative pursuit with encirclement guarantee via robust model predictive con- trol,
C. Wang, H. Chen, J. Pan, and W. Zhang, “Distributed cooperative pursuit with encirclement guarantee via robust model predictive con- trol,” Robotics and Autonomous Systems , pp. 1–16, 2025
work page 2025
-
[13]
Multi-agent cooperative pursuit-defense strat- egy against one single attacker,
Z. Deng and Z. Kong, “Multi-agent cooperative pursuit-defense strat- egy against one single attacker,” IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 5772–5778, 2020
work page 2020
-
[14]
Cooperative target protection from a superior attacker,
E. Garcia, “Cooperative target protection from a superior attacker,” Automatica, vol. 131, p. 109696, 2021
work page 2021
-
[15]
Analysis of role switch for cooperative target defense differential game,
L. Liang, F. Deng, M. Lu, and J. Chen, “Analysis of role switch for cooperative target defense differential game,” IEEE Transactions on Automatic Control, vol. 66, no. 2, pp. 902–909, 2020
work page 2020
-
[16]
Optimal strategies for the game of protecting a plane in 3-D,
E. Garcia, I. Weintraub, D. W. Casbeer, and M. Pachter, “Optimal strategies for the game of protecting a plane in 3-D,” in American Control Conference (ACC) , 2022, pp. 102–107
work page 2022
-
[17]
E. Garcia, D. M. Tran, D. Casbeer, D. Milutinovic, and M. Pachter, “Beyond visual range tactics,” in AIAA Scitech 2021 F orum , 2021, p. 1229
work page 2021
-
[18]
A framework for pursuit evasion games in Rn,
S. Kopparty and C. V . Ravishankar, “A framework for pursuit evasion games in Rn,” Information Processing Letters , vol. 96, no. 3, pp. 114–122, 2005
work page 2005
-
[19]
Encirclement guaranteed cooperative pursuit with robust model predictive control,
C. Wang, H. Chen, J. Pan, and W. Zhang, “Encirclement guaranteed cooperative pursuit with robust model predictive control,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2021, pp. 1473–1479
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.