On Feedback Speed Control for a Planar Tracking
Pith reviewed 2026-05-10 17:19 UTC · model grok-4.3
The pith
Feedback speed control with constant bearing steering achieves asymptotic stability in planar leader-follower tracking when the leader's steering is known.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed feedback speed control yields asymptotic stability of the closed-loop system when the steering of the leader is known. For the case when the leader's steering is unavailable to the follower, the system is still input-to-state stable with respect to the leader's steering viewed as an input. If the leader's steering is periodic, the follower will asymptotically converge to a periodic orbit with the same period. The two-agent law extends directly to an N-agent chain network.
What carries the argument
The feedback speed control law paired with constant bearing steering, which uses relative position and velocity to adjust the follower's speed and maintain side-by-side formation.
If this is right
- Asymptotic stability holds for the closed-loop tracking errors when leader steering is measured.
- Input-to-state stability bounds the tracking errors in terms of the leader steering signal when it is unknown.
- Periodic leader steering produces matching-period periodic orbits for the follower.
- The two-agent law scales to an N-agent chain that propagates directional information along the line.
Where Pith is reading between the lines
- The chain extension suggests that local speed rules alone can coordinate heading changes across a group without explicit communication of turns.
- The input-to-state result implies that brief sensor dropouts in steering data do not destroy formation, only produce bounded transients.
- Mobile-robot experiments already validate the two-agent case; the same hardware could test the N-agent chain under real sensor noise.
Load-bearing premise
The agents are perfect planar kinematic models that execute the constant bearing steering command exactly from accurate relative measurements.
What would settle it
A trial in which the leader applies an arbitrary time-varying steering signal and the follower distance or angle error grows without bound would disprove the input-to-state stability result.
Figures
read the original abstract
This paper investigates a planar tracking problem between a leader and follower agent. We propose a novel feedback speed control law, paired with a constant bearing steering strategy, to maintain an abreast formation between the two agents. We prove that the proposed control yields asymptotic stability of the closed-loop system when the steering of the leader is known. For the case when the leader's steering is unavailable to the follower, we show that the system is still input-to-state stable with respect to the leader's steering viewed as an input. Furthermore, we demonstrate that if the leader's steering is periodic, the follower will asymptotically converge to a periodic orbit with the same period. We validate these results through numerical simulations and experimental implementations on mobile robots. Finally, we demonstrate the scalability of the proposed approach by extending the two-agent control law to an N-agent chain network, illustrating its implications for directional information propagation in biological and engineered flocks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper proposes a novel feedback speed control law paired with a constant-bearing steering strategy for planar leader-follower agents to achieve and maintain an abreast formation. The central claims are that the closed-loop system is asymptotically stable when the leader's steering angle is known to the follower, input-to-state stable (ISS) with respect to the leader's steering when it is unavailable, and that periodic leader steering induces asymptotic convergence of the follower to a periodic orbit of matching period. These results are derived via Lyapunov analysis for the known-steering case and ISS-Lyapunov functions for the unknown case, with an additional periodic-orbit argument. The claims are supported by numerical simulations, hardware experiments on differential-drive mobile robots, and an extension of the two-agent law to an N-agent chain network demonstrating directional information propagation.
Significance. If the stability and ISS results hold under the stated kinematic assumptions, the work provides a clean, implementable speed-control complement to constant-bearing guidance that guarantees formation maintenance with explicit robustness margins. The ISS property with respect to steering disturbances is a useful feature for realistic settings where leader commands are imperfectly known. Experimental validation on physical robots and the N-agent chain extension are concrete strengths that move the contribution beyond pure theory toward applications in robotic formations and biological flocking models. The use of standard Lyapunov and ISS tools makes the proofs accessible and falsifiable.
major comments (2)
- §3.2, Eq. (12): the Lyapunov derivative for the known-steering case is claimed to be negative definite, but the cross terms arising from the relative-velocity kinematics are not explicitly bounded; a short additional estimate is needed to confirm that the quadratic form remains negative definite for all admissible speeds.
- §5, experimental section: the reported position and heading errors converge, yet no quantitative comparison (e.g., RMS error or settling time) against a pure constant-bearing controller without the proposed speed law is provided; this weakens the claim that the speed feedback is the decisive factor.
minor comments (3)
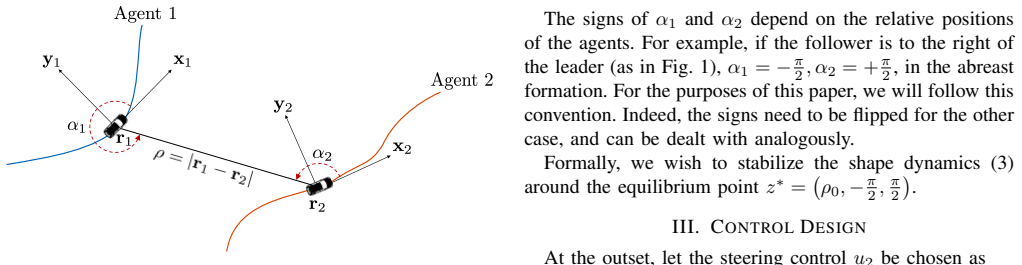
- The definition of the abreast formation (desired relative bearing of 90°) is introduced in the abstract and §2 but is not restated with a diagram or explicit coordinate expression in the stability sections; adding a short figure or equation would improve readability.
- Notation for the leader's steering rate ω_L is used both as a known signal and as an exogenous input without a consistent font or subscript distinction; this creates minor ambiguity when switching between the asymptotic-stability and ISS theorems.
- The N-agent chain extension in §6 is described at a high level; a single additional sentence clarifying how the ISS gain propagates along the chain would make the scalability claim more precise.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and the constructive comments, which will help clarify and strengthen the manuscript. We address each major comment below and will incorporate the requested revisions.
read point-by-point responses
-
Referee: §3.2, Eq. (12): the Lyapunov derivative for the known-steering case is claimed to be negative definite, but the cross terms arising from the relative-velocity kinematics are not explicitly bounded; a short additional estimate is needed to confirm that the quadratic form remains negative definite for all admissible speeds.
Authors: We agree that the bounding of cross terms was left implicit and that an explicit estimate improves clarity. In the revised manuscript we will add a short paragraph immediately after Eq. (12) that uses the positivity and uniform boundedness of the admissible speeds (v_f, v_l > 0, |v| ≤ V_max) to show that the cross-term contribution is dominated by the negative quadratic terms, yielding Ḋ ≤ −λ_min(Q)‖e‖² with Q positive definite for all admissible speeds. revision: yes
-
Referee: §5, experimental section: the reported position and heading errors converge, yet no quantitative comparison (e.g., RMS error or settling time) against a pure constant-bearing controller without the proposed speed law is provided; this weakens the claim that the speed feedback is the decisive factor.
Authors: We acknowledge that a direct quantitative comparison would better isolate the contribution of the speed feedback. In the revision we will augment Section 5 with a side-by-side comparison (both in simulation and on the hardware platform) of the proposed law against constant-bearing steering at constant speed, reporting RMS position/heading errors and settling times to demonstrate the improvement attributable to the speed control. revision: yes
Circularity Check
No significant circularity; derivation self-contained via standard Lyapunov/ISS analysis
full rationale
The paper proposes a novel feedback speed control law paired with constant-bearing steering for planar kinematic agents and derives asymptotic stability (known leader steering), ISS (unknown steering as input), and periodic orbit convergence (periodic steering) directly from the closed-loop dynamics. These are standard control-theoretic results applied to the newly stated law, with no evidence of self-definitional reductions, fitted inputs renamed as predictions, load-bearing self-citations, uniqueness theorems imported from the authors' prior work, or ansatzes smuggled via citation. Modeling assumptions (perfect kinematics and measurements) are stated explicitly and do not presuppose the target stability claims. Validation via simulations and robot experiments is external to the derivation chain.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Lyapunov stability theory for nonlinear systems
- standard math Input-to-state stability concepts
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.