Teaching Robots to Interpret Social Interactions through Lexically-guided Dynamic Graph Learning
Pith reviewed 2026-05-21 00:42 UTC · model grok-4.3
The pith
A framework called SocialLDG lets robots infer users' hidden internal states from behavior by modeling six tasks as a dynamic graph whose affinities change over time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SocialLDG represents the dynamic relationship between latent internal states and observable actions as six distinct tasks whose affinities evolve over time; a language model supplies lexical priors for each task while dynamic graph learning tracks the changing connections, yielding state-of-the-art results on two public human-robot social interaction datasets, seamless addition of new tasks without catastrophic forgetting, and explicit insights into temporal unfolding of interactions and mutual influence between states and actions.
What carries the argument
The SocialLDG multi-task framework that treats social states as six tasks and uses dynamic graph learning to model their time-varying affinities, guided by lexical priors from a language model.
If this is right
- The model reaches state-of-the-art performance on two public human-robot social interaction datasets.
- New tasks integrate without erasing accuracy on previously learned tasks.
- Explicit affinity tracking shows how interactions develop over time and how internal states shape observable actions.
Where Pith is reading between the lines
- The same dynamic-graph treatment of latent and observable variables could be tested in domains such as autonomous vehicles reading pedestrian intent.
- Comparing the learned six-task affinities against independent psychological annotations of the same videos would test whether the decomposition matches human social cognition.
- Closing the loop by feeding the model's state predictions back into robot action selection could produce more responsive social behavior.
- Lexical priors might reduce the need for large amounts of labeled interaction data when deploying the method in new cultural settings.
Load-bearing premise
Internal states and observable actions in social encounters arise from one shared socio-cognitive process that can be decomposed into six distinct tasks whose relationships change over time.
What would settle it
If retraining the model on the two datasets produces no accuracy gain over single-task baselines or shows clear performance drops on earlier tasks after new ones are added, the claimed advantages would not hold.
Figures



read the original abstract
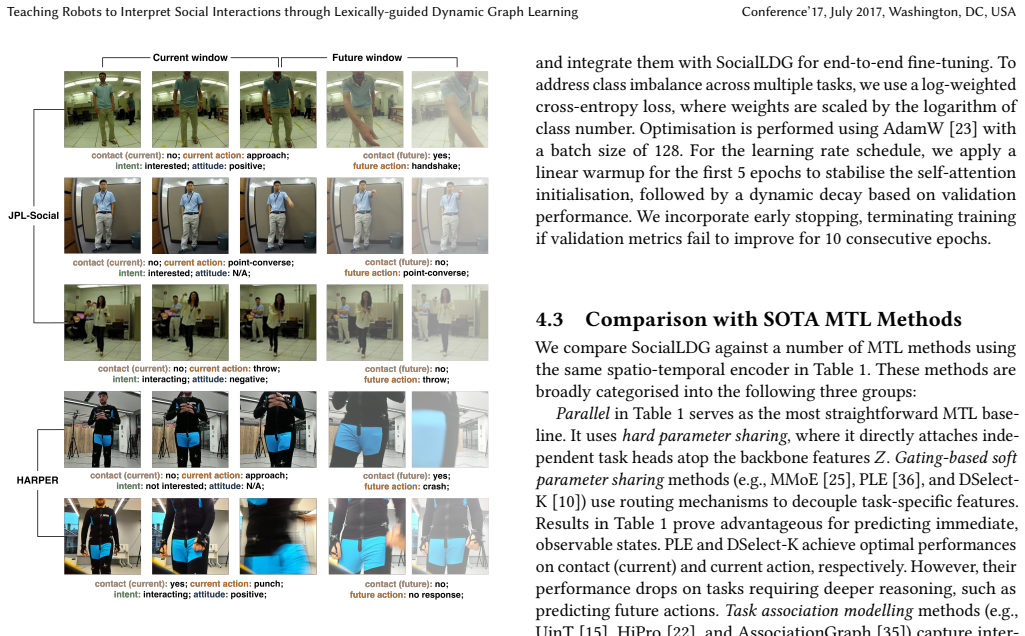
For a robot to be called socially intelligent, it must be able to infer users internal states from their current behaviour, predict the users future behaviour, and if required, respond appropriately. In this work, we investigate how robots can be endowed with such social intelligence by modelling the dynamic relationship between user's internal states (latent) and actions (observable state). Our premise is that these states arise from the same underlying socio-cognitive process and influence each other dynamically. Drawing inspiration from theories in Cognitive Science, we propose a novel multi-task learning framework, termed as \textbf{SocialLDG} that explicitly models the dynamic relationship among the states represent as six distinct tasks. Our framework uses a language model to introduce lexical priors for each task and employs dynamic graph learning to model task affinity evolving with time. SocialLDG has three advantages: First, it achieves state-of-the-art performance on two challenging human-robot social interaction datasets available publicly. Second, it supports strong task scalability by learning new tasks seamlessly without catastrophic forgetting. Finally, benefiting from explicit modelling task affinity, it offers insights on how different interactions unfolds in time and how the internal states and observable actions influence each other in human decision making.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces SocialLDG, a multi-task learning framework for endowing robots with social intelligence. It models the dynamic relationship between users' latent internal states and observable actions as six distinct tasks, incorporating lexical priors from a language model and dynamic graph learning to capture evolving task affinities over time. The work claims state-of-the-art performance on two public human-robot social interaction datasets, seamless scalability to new tasks without catastrophic forgetting, and insights into interaction dynamics and mutual influences between states and actions.
Significance. If the empirical results hold, this could meaningfully advance human-robot interaction research by integrating cognitive science premises with scalable ML techniques, offering both performance gains and interpretability through explicit task-affinity modeling. Credit is due for using publicly available datasets and including dedicated scalability experiments that address catastrophic forgetting.
major comments (2)
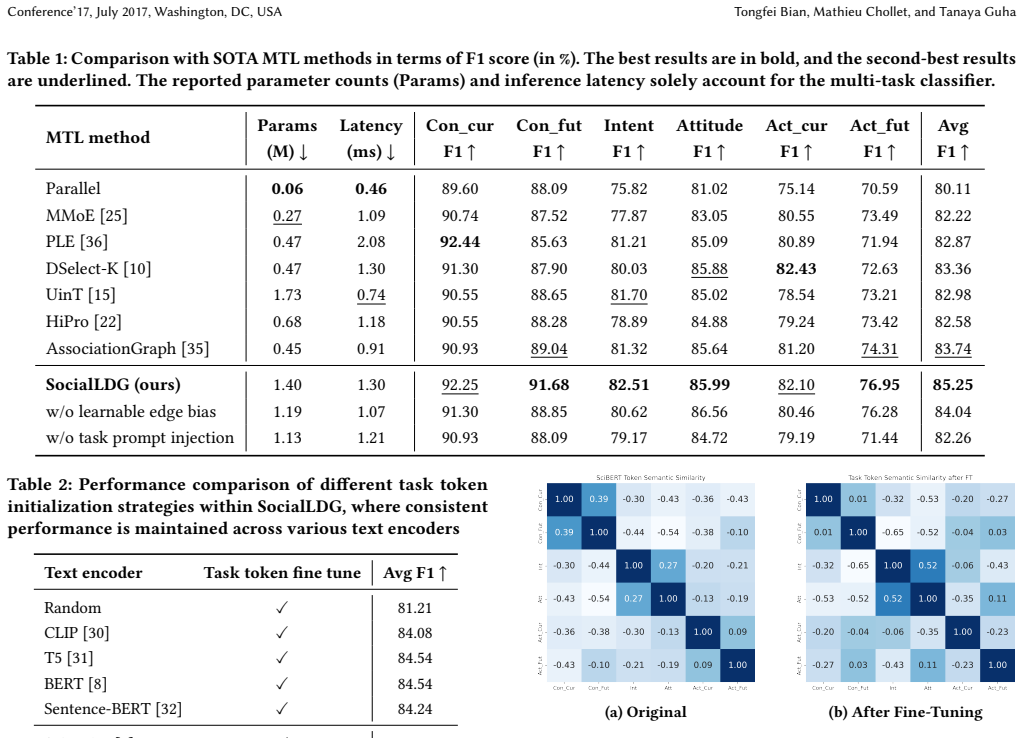
- [Abstract] Abstract: The SOTA performance and scalability claims are asserted without any quantitative metrics, baselines, error bars, or ablation results, which is load-bearing for the central empirical contribution and prevents assessment of whether the modeling choices deliver the stated gains.
- [§3] §3 (Framework): The decision to instantiate the shared socio-cognitive process as exactly six tasks is central to the multi-task and dynamic-graph components, yet the manuscript provides limited justification for this number or the task definitions, risking that the affinity-evolution mechanism is under-constrained.
minor comments (2)
- [Introduction] Notation for the six tasks and the lexical-prior injection could be introduced with a small diagram or table in the early sections to improve readability.
- [Related Work] Ensure that the dynamic graph update rule is contrasted with standard multi-task baselines in the related-work discussion.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback. We address each major comment below and indicate the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The SOTA performance and scalability claims are asserted without any quantitative metrics, baselines, error bars, or ablation results, which is load-bearing for the central empirical contribution and prevents assessment of whether the modeling choices deliver the stated gains.
Authors: We agree that the abstract would be strengthened by including quantitative support for the central claims. In the revised manuscript we will update the abstract to report key performance metrics (e.g., accuracy or F1 improvements over baselines on both datasets), standard error bars from repeated runs, and a brief reference to the ablation results that isolate the contribution of the dynamic-graph component. These additions will make the empirical gains explicit while remaining within the abstract length limit. revision: yes
-
Referee: [§3] §3 (Framework): The decision to instantiate the shared socio-cognitive process as exactly six tasks is central to the multi-task and dynamic-graph components, yet the manuscript provides limited justification for this number or the task definitions, risking that the affinity-evolution mechanism is under-constrained.
Authors: The six tasks are drawn from core socio-cognitive processes described in the cognitive-science literature (emotion recognition, intention inference, action prediction, and bidirectional influence between latent states and observable behavior). We acknowledge that the current §3 offers only a high-level motivation. We will expand this section with explicit definitions for each task, additional citations to the relevant cognitive-science sources, and a short discussion of how the chosen decomposition supplies sufficient structure for the dynamic-graph affinity mechanism to evolve without being under-constrained. revision: yes
Circularity Check
No significant circularity
full rationale
The paper introduces SocialLDG as an explicit multi-task modeling choice that represents internal states and observable actions as six socio-cognitive tasks whose affinities evolve via dynamic graph learning with lexical priors from an LM. No equations, derivations, or self-citations are shown that reduce any claimed prediction or result to a quantity defined by the inputs or fitted parameters. Performance claims rest on empirical SOTA results on public datasets, scalability tests without catastrophic forgetting, and interpretability from the explicit task-affinity modeling; these are externally falsifiable and do not collapse by construction to the modeling premise itself.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption User internal states and actions arise from the same underlying socio-cognitive process and influence each other dynamically
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our premise is that these states arise from the same underlying socio-cognitive process and influence each other dynamically... dynamic graph learning to model task affinity evolving with time.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
SocialLDG... employs dynamic graph learning to model task affinity evolving with time.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Gabriele Abbate, Alessandro Giusti, Viktor Schmuck, Oya Celiktutan, and Anto- nio Paolillo. 2024. Self-supervised prediction of the intention to interact with a service robot.Robotics and Autonomous Systems171 (2024), 104568
work page 2024
-
[2]
Andrea Avogaro, Andrea Toaiari, Federico Cunico, Xiangmin Xu, Haralambos Dafas, Alessandro Vinciarelli, Emma Li, and Marco Cristani. 2024. Exploring 3D Human Pose Estimation and Forecasting from the Robot’s Perspective: The HARPER Dataset. InIROS. IEEE, 5828–5835
work page 2024
- [3]
-
[4]
Tongfei Bian, Mathieu Chollet, and Tanaya Guha. 2025. Robust Understanding of Human-Robot Social Interactions through Multimodal Distillation. InProceedings of the 33rd ACM International Conference on Multimedia. 5726–5734
work page 2025
-
[5]
Tongfei Bian, Yiming Ma, Mathieu Chollet, Victor Sanchez, and Tanaya Guha
-
[6]
In2025 IEEE International Conference on Multimedia and Expo (ICME)
Interact with me: Joint egocentric forecasting of intent to interact, attitude and social actions. In2025 IEEE International Conference on Multimedia and Expo (ICME). IEEE, 1–6
-
[7]
Aude Billard, Alin Albu-Schaeffer, Rachid Alami, Tamim Asfour, Serena Ivaldi, Christophe Leroux, Danica Kragic, Astrid Rosenthal-von Der Pütten, Nicola Nosengo, and Chiara Sabelli. 2025. Human–Robot Interaction: Successes, Hurdles, and Remaining Challenges [Opinion].IEEE Robotics and Automation Magazine 32, 4 (2025), 101–106
work page 2025
-
[8]
Lingwei Dang, Yongwei Nie, Chengjiang Long, Qing Zhang, and Guiqing Li. 2021. Msr-gcn: Multi-scale residual graph convolution networks for human motion prediction. InICCV. 11467–11476
work page 2021
-
[9]
Jacob Devlin, Ming-Wei Chang, Kenton Lee, and Kristina Toutanova. 2019. Bert: Pre-training of deep bidirectional transformers for language understanding. In ACL. 4171–4186
work page 2019
-
[10]
Hao-Shu Fang, Jiefeng Li, Hongyang Tang, Chao Xu, Haoyi Zhu, Yuliang Xiu, Yong-Lu Li, and Cewu Lu. 2022. Alphapose: Whole-body regional multi-person pose estimation and tracking in real-time.TPAMI45, 6 (2022), 7157–7173
work page 2022
-
[11]
Hussein Hazimeh, Zhe Zhao, Aakanksha Chowdhery, Maheswaran Sathiamoor- thy, Yihua Chen, Rahul Mazumder, Lichan Hong, and Ed Chi. 2021. Dselect-k: Differentiable selection in the mixture of experts with applications to multi-task learning.NIPS34 (2021), 29335–29347
work page 2021
-
[12]
Damith Herath, Janie Busby Grant, Adrian Rodriguez, and Jenny L Davis. 2025. First impressions of a humanoid social robot with natural language capabilities. Scientific Reports15, 1 (2025), 19715
work page 2025
-
[13]
Geoffrey E Hinton and Ruslan R Salakhutdinov. 2006. Reducing the dimensional- ity of data with neural networks.science313, 5786 (2006), 504–507
work page 2006
-
[14]
Sepp Hochreiter and Jürgen Schmidhuber. 1997. Long short-term memory.Neural computation9, 8 (1997), 1735–1780
work page 1997
-
[15]
Alexander Hong, Nolan Lunscher, Tianhao Hu, Yuma Tsuboi, Xinyi Zhang, Silas Franco dos Reis Alves, Goldie Nejat, and Beno Benhabib. 2020. A multi- modal emotional human–robot interaction architecture for social robots engaged in bidirectional communication.IEEE transactions on cybernetics51, 12 (2020), 5954–5968
work page 2020
-
[16]
Ronghang Hu and Amanpreet Singh. 2021. Unit: Multimodal multitask learning with a unified transformer. InICCV. 1439–1449
work page 2021
-
[17]
Sheng Jin, Lumin Xu, Jin Xu, Can Wang, Wentao Liu, Chen Qian, Wanli Ouyang, and Ping Luo. 2020. Whole-body human pose estimation in the wild. InECCV. Springer, 196–214
work page 2020
-
[18]
Magnus Jung, Ahmed Abdelrahman, Thorsten Hempel, Basheer Al-Tawil, Qiaoyue Yang, Sven Wachsmuth, and Ayoub Al-Hamadi. 2025. Eye contact based engagement prediction for efficient human–robot interaction.Complex & Intelligent Systems11, 7 (2025), 286
work page 2025
-
[19]
Thomas N. Kipf and Max Welling. 2017. Semi-Supervised Classification with Graph Convolutional Networks. InICLR
work page 2017
-
[20]
Woo-Ri Ko, Minsu Jang, Jaeyeon Lee, and Jaehong Kim. 2021. AIR-Act2Act: Human–human interaction dataset for teaching non-verbal social behaviors to robots.The International Journal of Robotics Research40, 4-5 (2021), 691–697
work page 2021
-
[21]
Ziva Kunda and Paul Thagard. 1996. Forming impressions from stereotypes, traits, and behaviors: A parallel-constraint-satisfaction theory.Psychological review103, 2 (1996), 284
work page 1996
-
[22]
Peizhen Li, Longbing Cao, Xiao-Ming Wu, Xiaohan Yu, and Runze Yang. 2025. Ugotme: An embodied system for affective human-robot interaction. InICRA. IEEE, 5542–5548
work page 2025
-
[23]
Yajing Liu, Yuning Lu, Hao Liu, Yaozu An, Zhuoran Xu, Zhuokun Yao, Baofeng Zhang, Zhiwei Xiong, and Chenguang Gui. 2023. Hierarchical prompt learning for multi-task learning. InCVPR. 10888–10898
work page 2023
-
[24]
Ilya Loshchilov and Frank Hutter. 2019. Decoupled Weight Decay Regularization. InICLR
work page 2019
-
[25]
Diogo C Luvizon, David Picard, and Hedi Tabia. 2018. 2d/3d pose estimation and action recognition using multitask deep learning. InCVPR. 5137–5146
work page 2018
-
[26]
Jiaqi Ma, Zhe Zhao, Xinyang Yi, Jilin Chen, Lichan Hong, and Ed H Chi. 2018. Modeling task relationships in multi-task learning with multi-gate mixture-of- experts. InSIGKDD. 1930–1939
work page 2018
-
[27]
Esteve Valls Mascaró, Hyemin Ahn, and Dongheui Lee. 2024. A unified masked autoencoder with patchified skeletons for motion synthesis. InAAAI, Vol. 38. 5261–5269
work page 2024
-
[28]
Youssef Mohamed, Séverin Lemaignan, Arzu Güneysu, Patric Jensfelt, and Chris- tian Smith. 2025. Fusion in context: A multimodal approach to affective state recognition. InRO-MAN. IEEE, 1049–1055
work page 2025
-
[29]
Wei Peng, Yue Hu, Yuqiang Xie, Luxi Xing, and Yajing Sun. 2022. Cogintac: Modeling the relationships between intention, emotion and action in interac- tive process from cognitive perspective. In2022 IEEE Congress on Evolutionary Computation (CEC). IEEE, 1–8
work page 2022
-
[30]
Yijian Qin, Xin Wang, Ziwei Zhang, Hong Chen, and Wenwu Zhu. 2023. Multi- task graph neural architecture search with task-aware collaboration and curricu- lum.NIPS36 (2023), 24879–24891
work page 2023
-
[31]
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. 2021. Learning transferable visual models from natural language supervision. InICML. PmLR, 8748–8763
work page 2021
-
[32]
Colin Raffel, Noam Shazeer, Adam Roberts, Katherine Lee, Sharan Narang, Michael Matena, Yanqi Zhou, Wei Li, and Peter J Liu. 2020. Exploring the limits of transfer learning with a unified text-to-text transformer.JMLR21, 140 (2020), 1–67
work page 2020
-
[33]
Nils Reimers and Iryna Gurevych. 2019. Sentence-bert: Sentence embeddings using siamese bert-networks. InEMNLP
work page 2019
-
[34]
Michael S Ryoo, Thomas J Fuchs, Lu Xia, Jake K Aggarwal, and Larry Matthies
-
[35]
Robot-centric activity prediction from first-person videos: What will they do to me?. InHRI. 295–302
-
[36]
Michael S Ryoo and Larry Matthies. 2013. First-person activity recognition: What are they doing to me?. InCVPR. 2730–2737
work page 2013
-
[37]
Jiayi Shen, Zehao Xiao, Xiantong Zhen, Cees Snoek, and Marcel Worring. 2022. Association graph learning for multi-task classification with category shifts.NIPS 35 (2022), 4503–4516
work page 2022
-
[38]
Hongyan Tang, Junning Liu, Ming Zhao, and Xudong Gong. 2020. Progressive layered extraction (ple): A novel multi-task learning (mtl) model for personalized recommendations. InRecSys. 269–278
work page 2020
-
[39]
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. 2017. Attention is all you need.NIPS30 (2017)
work page 2017
-
[40]
Petar Veličković, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Liò, and Yoshua Bengio. 2018. Graph Attention Networks. InICLR
work page 2018
-
[41]
Ruchen Wen, Alyssa Hanson, Zhao Han, and Tom Williams. 2023. Fresh start: Encouraging politeness in wakeword-driven human-robot interaction. InHRI. 112–121
work page 2023
-
[42]
Sijie Yan, Yuanjun Xiong, and Dahua Lin. 2018. Spatial temporal graph convolu- tional networks for skeleton-based action recognition. InAAAI, Vol. 32
work page 2018
-
[43]
Hanrong Ye and Dan Xu. 2023. Taskprompter: Spatial-channel multi-task prompt- ing for dense scene understanding. InICLR
work page 2023
-
[44]
Chengxuan Ying, Tianle Cai, Shengjie Luo, Shuxin Zheng, Guolin Ke, Di He, Yanming Shen, and Tie-Yan Liu. 2021. Do transformers really perform badly for graph representation?NIPS34 (2021), 28877–28888
work page 2021
-
[45]
Xinyi Yu, Xin Zhang, Chengjun Xu, and Linlin Ou. 2024. Human–robot collabora- tive interaction with human perception and action recognition.Neurocomputing 563 (2024), 126827
work page 2024
-
[46]
Lijun Zhang, Xiao Liu, and Hui Guan. 2022. AutoMTL: a programming framework for automating efficient multi-task learning. InNIPS. 13 pages
work page 2022
-
[47]
Yazhou Zhang, Jinglin Wang, Yaochen Liu, Lu Rong, Qian Zheng, Dawei Song, Prayag Tiwari, and Jing Qin. 2023. A multitask learning model for multimodal sarcasm, sentiment and emotion recognition in conversations.Information Fusion 93 (2023), 282–301
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.