Recognition: unknown
Learning from Demonstration with Failure Awareness for Safe Robot Navigation
Pith reviewed 2026-05-08 07:46 UTC · model grok-4.3
The pith
Decoupling failure data for value shaping from success data for policy learning enables safer robot navigation from demonstrations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that in offline reinforcement learning for learning from demonstration, failure experiences can be used to shape value estimation in hazardous regions while restricting policy learning to successful demonstrations alone, enabling effective use of failure data without corrupting policy behavior and resulting in lower collision rates while preserving task success.
What carries the argument
The explicit decoupling that assigns failure data solely to value function shaping for hazardous states and success data to policy optimization.
If this is right
- Collision rates decrease in navigation scenarios that include states beyond the original demonstrations.
- Task success rates remain comparable to or better than those from success-only training.
- The approach supports generalization to new environments and different robot hardware.
- Failure data becomes usable for safety without requiring valid action labels from those failures.
Where Pith is reading between the lines
- The same separation of value shaping from policy learning could be tested in other imitation settings such as manipulation where most demonstrations are safe.
- Value functions shaped by failures might serve as a modular safety layer that can be added to existing demonstration-based controllers.
- Generating synthetic failure trajectories in simulation could amplify the effect if real failures are too rare to shape values reliably.
Load-bearing premise
Failure experiences provide enough information to improve value estimates for unsafe states even without action guidance, and limiting policy training to success data avoids performance degradation.
What would settle it
A controlled experiment in which adding the failure-shaped value estimates produces no measurable drop in collision rates compared to a success-only baseline, or produces a drop but also lowers task success rates, would falsify the claimed benefit of the separation.
Figures




read the original abstract
Learning from demonstration is widely used for robot navigation, yet it suffers from a fundamental limitation: demonstrations consist predominantly of successful behaviors and provide limited coverage of unsafe states. This limitation leads to poor safety when the robot encounters scenarios beyond the demonstration distribution. Failure experiences, such as collisions, contain essential information about unsafe regions, but remain underutilized. The key difficulty lies in the fact that failure data do not provide valid guidance for action imitation, and their naive incorporation into policy learning often degrades performance. We address this challenge by proposing a failure-aware learning framework that explicitly decouples the roles of success and failure data. In this framework, failure experiences are used to shape value estimation in hazardous regions, while policy learning is restricted to successful demonstrations. This separation enables the effective use of failure data without corrupting policy behavior. We implement this design within an offline reinforcement learning (RL) setting and evaluate it in both simulation and real-world environments. The results show that our framework consistently reduces collision rates while preserving the task success rate, and demonstrate strong generalization across different environments and robot platforms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that learning from demonstration for robot navigation is limited by lack of unsafe state coverage in successful demos, leading to poor safety outside the demo distribution. It proposes a failure-aware framework in an offline RL setting that decouples the data roles: failure trajectories (e.g., collisions) are used exclusively to shape value estimation in hazardous regions, while policy learning is restricted to successful demonstrations only. This separation is said to allow effective use of failure data without corrupting policy behavior. Evaluations in simulation and real-world environments reportedly show consistent collision rate reductions while preserving task success rates, plus strong generalization across environments and robot platforms.
Significance. If the empirical results are robustly supported, the work addresses a practically important limitation in LfD for safety-critical navigation by providing a clean separation that aligns with standard offline RL practices (negative terminal values for failures, imitation/advantage-weighted regression on successes). The reported generalization across platforms and environments would be a notable strength if backed by proper controls.
major comments (2)
- [Abstract] Abstract: the central claim of 'consistent collision reduction with preserved success rates and generalization' is presented without any methods details, data splits, error bars, baselines, or statistical tests. This makes it impossible to assess whether the reported outcomes actually support the decoupling framework or could be explained by other factors.
- [Abstract] The weakest assumption—that failure data can reliably shape value estimation in hazardous regions without action guidance, while restricting policy learning to successes alone prevents degradation—requires explicit validation. The manuscript must show (e.g., via ablation or comparison to naive failure incorporation) that the separation is load-bearing for the safety gains rather than incidental.
minor comments (1)
- Clarify the exact offline RL algorithm (e.g., which value update or policy objective is used) and how failure trajectories are processed into value targets without introducing distributional shift.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on our manuscript. We address each major comment below with clarifications drawn from the full paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'consistent collision reduction with preserved success rates and generalization' is presented without any methods details, data splits, error bars, baselines, or statistical tests. This makes it impossible to assess whether the reported outcomes actually support the decoupling framework or could be explained by other factors.
Authors: The abstract is a concise summary constrained by length limits and is not intended to contain full methodological or statistical details. The complete methods (offline RL formulation with decoupled data roles), data collection/splits, baselines, error bars from multiple runs, and statistical tests are provided in Sections 3, 4, and 5 of the manuscript, with results across simulation and real-world settings supporting the claims. We will revise the abstract to briefly reference the offline RL setting, key metrics, and evaluation scope. revision: partial
-
Referee: [Abstract] The weakest assumption—that failure data can reliably shape value estimation in hazardous regions without action guidance, while restricting policy learning to successes alone prevents degradation—requires explicit validation. The manuscript must show (e.g., via ablation or comparison to naive failure incorporation) that the separation is load-bearing for the safety gains rather than incidental.
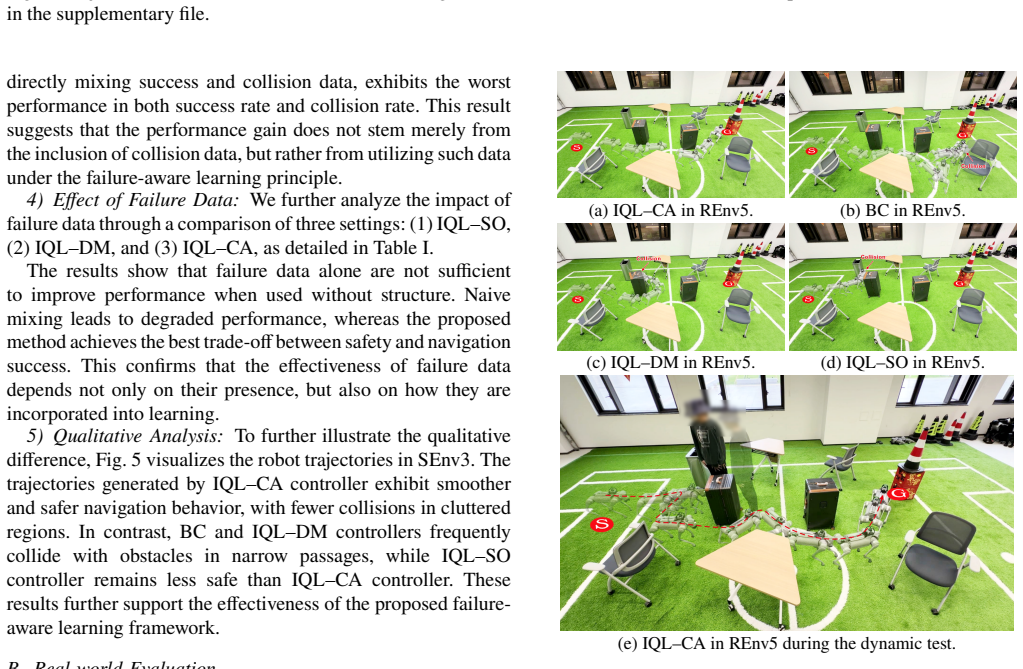
Authors: The manuscript validates this assumption through direct comparisons in the experiments. We include an ablation contrasting our decoupled approach (failure data for value estimation only, successes for policy) against a naive baseline that incorporates failure trajectories into policy learning. The naive variant degrades success rates due to invalid action guidance, while the decoupled method reduces collisions without loss of success, confirming the separation is load-bearing. Failure data shapes value functions via negative terminal values in hazardous states without providing action labels. revision: no
Circularity Check
No significant circularity in framework proposal
full rationale
The paper proposes a failure-aware learning framework that decouples success and failure data in offline RL for robot navigation: failure trajectories shape value estimation in hazardous regions while policy learning is restricted to successful demonstrations. This is presented as an explicit design choice rather than a derived mathematical result. No equations, fitted parameters renamed as predictions, self-definitional constructs, or load-bearing self-citations appear in the abstract or description. The approach aligns with standard offline RL practices (e.g., negative rewards for unsafe terminals and behavioral cloning on successes) and is supported by empirical evaluation in simulation and real-world settings. The derivation chain is therefore self-contained and does not reduce to its inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Failure data provides reliable signals for value estimation in hazardous regions without action labels.
- domain assumption Standard offline RL and imitation learning assumptions hold for the separation to work.
Reference graph
Works this paper leans on
-
[1]
A survey of imitation learning: Algorithms, recent developments, and challenges,
M. Zare, P. M. Kebria, A. Khosravi, and S. Nahavandi, “A survey of imitation learning: Algorithms, recent developments, and challenges,” IEEE Transactions on Cybernetics, vol. 54, no. 12, pp. 7173–7186, 2024
2024
-
[2]
Mapless navigation with safety-enhanced imitation learning,
C. Yan, J. Qin, Q. Liu, Q. Ma, and Y. Kang, “Mapless navigation with safety-enhanced imitation learning,”IEEE Transactions on Industrial Electronics, vol. 70, no. 7, pp. 7073–7081, 2022
2022
-
[3]
Behavioral Cloning from Observation
F. Torabi, G. Warnell, and P. Stone, “Behavioral cloning from observation,” arXiv preprint arXiv:1805.01954, 2018
work page Pith review arXiv 2018
-
[4]
A reduction of imitation learning and structured prediction to no-regret online learning,
S. Ross, G. Gordon, and D. Bagnell, “A reduction of imitation learning and structured prediction to no-regret online learning,” inProceedings of the fourteenth international conference on artificial intelligence and statistics. JMLR Workshop and Conference Proceedings, 2011, pp. 627– 635
2011
-
[5]
Generative adversarial imitation learning,
J. Ho and S. Ermon, “Generative adversarial imitation learning,”Advances in neural information processing systems, vol. 29, 2016
2016
-
[6]
Should i run offline reinforcement learning or behavioral cloning?
A. Kumar, J. Hong, A. Singh, and S. Levine, “Should i run offline reinforcement learning or behavioral cloning?” inInternational Conference on Learning Representations, 2022. [Online]. Available: https://openreview.net/forum?id=AP1MKT37rJ
2022
-
[7]
No experts, no problem: Avoidance learning from bad demonstrations,
H. Hoang, T. A. Mai, and P. Varakantham, “No experts, no problem: Avoidance learning from bad demonstrations,” inThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
2025
-
[8]
Deep neural network for real-time autonomous indoor navigation,
D. K. Kim and T. Chen, “Deep neural network for real-time autonomous indoor navigation,”ArXiv, vol. abs/1511.04668, 2015. [Online]. Available: https://api.semanticscholar.org/CorpusID:1574861
-
[9]
Multimodal deep autoencoders for control of a mobile robot,
J. Sergeant, N. S¨ underhauf, M. Milford, B. Upcroftet al., “Multimodal deep autoencoders for control of a mobile robot,” inProc. of Australasian Conf. for robotics and automation (ACRA), 2015
2015
-
[10]
Off-road obstacle avoidance through end-to-end learning,
U. Muller, J. Ben, E. Cosatto, B. Flepp, and Y. Cun, “Off-road obstacle avoidance through end-to-end learning,”Advances in neural information processing systems, vol. 18, 2005. 8
2005
-
[11]
From perception to decision: A data-driven approach to end-to-end motion planning for autonomous ground robots,
M. Pfeiffer, M. Schaeuble, J. Nieto, R. Siegwart, and C. Cadena, “From perception to decision: A data-driven approach to end-to-end motion planning for autonomous ground robots,” in2017 ieee international conference on robotics and automation (icra). IEEE, 2017, pp. 1527– 1533
2017
-
[12]
Reinforced imitation: Sample efficient deep reinforcement learning for mapless navigation by leveraging prior demonstrations,
M. Pfeiffer, S. Shukla, M. Turchetta, C. Cadena, A. Krause, R. Siegwart, and J. Nieto, “Reinforced imitation: Sample efficient deep reinforcement learning for mapless navigation by leveraging prior demonstrations,”IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 4423–4430, 2018
2018
-
[13]
Better-than-demonstrator imitation learning via automatically-ranked demonstrations,
D. S. Brown, W. Goo, and S. Niekum, “Better-than-demonstrator imitation learning via automatically-ranked demonstrations,” inConference on robot learning. PMLR, 2020, pp. 330–359
2020
-
[14]
Stabilizing off- policy q-learning via bootstrapping error reduction,
A. Kumar, J. Fu, M. Soh, G. Tucker, and S. Levine, “Stabilizing off- policy q-learning via bootstrapping error reduction,”Advances in neural information processing systems, vol. 32, 2019
2019
-
[15]
Off-policy deep reinforcement learning without exploration,
S. Fujimoto, D. Meger, and D. Precup, “Off-policy deep reinforcement learning without exploration,” inInternational Conference on Machine Learning, 2018. [Online]. Available: https://api.semanticscholar.org/ CorpusID:54457299
2018
-
[16]
Behavior Regularized Offline Reinforcement Learning
Y. Wu, G. Tucker, and O. Nachum, “Behavior regularized offline reinforce- ment learning,”arXiv preprint arXiv:1911.11361, 2019
work page internal anchor Pith review arXiv 1911
-
[17]
Provably good batch off-policy reinforcement learning without great exploration,
Y. Liu, A. Swaminathan, A. Agarwal, and E. Brunskill, “Provably good batch off-policy reinforcement learning without great exploration,” Advances in neural information processing systems, vol. 33, pp. 1264– 1274, 2020
2020
-
[18]
Conservative q-learning for offline reinforcement learning,
A. Kumar, A. Zhou, G. Tucker, and S. Levine, “Conservative q-learning for offline reinforcement learning,”Advances in neural information processing systems, vol. 33, pp. 1179–1191, 2020
2020
-
[19]
Offline reinforcement learning for visual navigation,
D. Shah, A. Bhorkar, H. Leen, I. Kostrikov, N. Rhinehart, and S. Levine, “Offline reinforcement learning for visual navigation,”arXiv preprint arXiv:2212.08244, 2022
-
[20]
Vapor: Legged robot navigation in unstructured outdoor environments using offline reinforcement learning,
K. Weerakoon, A. J. Sathyamoorthy, M. Elnoor, and D. Manocha, “Vapor: Legged robot navigation in unstructured outdoor environments using offline reinforcement learning,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 10 344–10 350
2024
-
[21]
Achieving centimeter-accuracy indoor localization on wifi platforms: A multi-antenna approach,
C. Chen, Y. Chen, Y. Han, H.-Q. Lai, F. Zhang, and K. R. Liu, “Achieving centimeter-accuracy indoor localization on wifi platforms: A multi-antenna approach,”IEEE Internet of Things Journal, vol. 4, no. 1, pp. 122–134, 2016
2016
-
[22]
Offline reinforcement learning with implicit q-learning,
I. Kostrikov, A. Nair, and S. Levine, “Offline reinforcement learning with implicit q-learning,” 2021
2021
-
[23]
Ipaprec: A promising tool for learning high-performance mapless navigation skills with deep reinforcement learning,
W. Zhang, Y. Zhang, N. Liu, K. Ren, and P. Wang, “Ipaprec: A promising tool for learning high-performance mapless navigation skills with deep reinforcement learning,”IEEE/ASME Transactions on Mechatronics, vol. 27, no. 6, pp. 5451–5461, 2022
2022
-
[24]
Learn to navigate maplessly with varied lidar configurations: A support point-based approach,
W. Zhang, N. Liu, and Y. Zhang, “Learn to navigate maplessly with varied lidar configurations: A support point-based approach,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1918–1925, 2021
1918
-
[25]
Massively multi-robot simulation in stage,
R. Vaughan, “Massively multi-robot simulation in stage,”Swarm intelli- gence, vol. 2, no. 2, pp. 189–208, 2008
2008
-
[26]
d3rlpy: An offline deep reinforcement learning library,
T. Seno and M. Imai, “d3rlpy: An offline deep reinforcement learning library,”Journal of Machine Learning Research, vol. 23, no. 315, pp. 1–20, 2022. [Online]. Available: http://jmlr.org/papers/v23/22-0017.html
2022
-
[27]
Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation,
L. Tai, G. Paolo, and M. Liu, “Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation,” in2017 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2017, pp. 31–36
2017
-
[28]
Learning with stochastic guidance for robot navigation,
L. Xie, Y. Miao, S. Wang, P. Blunsom, Z. Wang, C. Chen, A. Markham, and N. Trigoni, “Learning with stochastic guidance for robot navigation,” IEEE transactions on neural networks and learning systems, vol. 32, no. 1, pp. 166–176, 2020
2020
-
[29]
gmapping
“gmapping.” [Online]. Available: http://wiki.ros.org/gmapping
-
[30]
Available: http://wiki.ros.org/amcl
“AMCL.” [Online]. Available: http://wiki.ros.org/amcl
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.