An Elastic Shape Variational Autoencoder for Skeleton Pose Trajectories
Pith reviewed 2026-05-19 17:12 UTC · model grok-4.3
The pith
The Elastic Shape VAE uses a shape manifold to model skeleton trajectories by removing rigid motions and timing differences.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
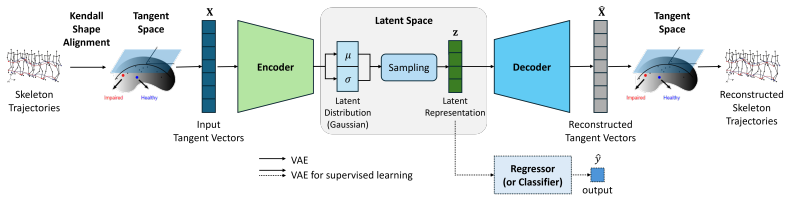
The authors claim that embedding the transported square-root velocity field representation of skeletal sequences on Kendall's shape manifold into a variational autoencoder framework, with encoding via the Riemannian logarithm map and decoding via the exponential map, leads to improved latent representations and superior performance on downstream tasks such as mobility score prediction and action classification.
What carries the argument
The Elastic Shape Variational Autoencoder (ES-VAE) that operates on the transported square-root velocity field (TSRVF) representation on Kendall's shape manifold, using Riemannian log map for encoding and exp map for decoding to handle the geometry of pose shapes.
If this is right
- The model improves prediction of clinical mobility scores from skeletal gait cycles.
- It enhances classification accuracy between healthy and post-stroke subjects.
- It achieves higher performance in action recognition on the NTU RGB+D dataset.
- It offers a generative framework for longitudinal data on pose shape manifolds with better latent spaces.
Where Pith is reading between the lines
- This could be applied to other sequence data involving shapes, like animal locomotion or facial dynamics.
- Reducing nuisance factors in the representation may decrease the amount of training data needed for good performance.
- Generated samples from the model could be used to augment datasets for training other pose analysis systems.
- Extending the approach to include additional manifold structures might handle even more complex variations in motion.
Load-bearing premise
The assumption that removing rigid transformations and temporal variability through the TSRVF representation on the shape manifold does not discard information important for the specific tasks at hand.
What would settle it
Observing that the ES-VAE underperforms a standard VAE on a dataset where the speed of movement or the scale of the subject is a key discriminative feature would challenge the central claim.
Figures






read the original abstract
Deep generative models provide flexible frameworks for modeling complex, structured data such as images, videos, 3D objects, and texts. However, when applied to sequences of human skeletons, standard variational autoencoders (VAEs) often allocate substantial capacity to nuisance factors-such as camera orientation, subject scale, viewpoint, and execution speed-rather than the intrinsic geometry of shapes and their motion. We propose the Elastic Shape - Variational Autoencoder (ES-VAE), a geometry-aware generative model for skeletal trajectories that leverages the transported square-root velocity field (TSRVF) representation on Kendall's shape manifold. This representation inherently removes rigid translations, rotations, and global scaling of shapes, and temporal rate variability of sequences, isolating the underlying shape dynamics. The ES-VAE encoder maps skeletal sequences to a low-dimensional latent space incorporating the Riemannian logarithm map, while the decoder reconstructs sequences using the corresponding exponential map. We demonstrate the effectiveness of ES-VAE on two datasets. First, we analyze skeletal gait cycles to predict clinical mobility scores and classify subjects into healthy and post-stroke groups. Second, we evaluate action recognition on the NTU RGB+D dataset. Across both settings, ES-VAE consistently outperforms standard VAEs and a range of sequence modeling baselines, including temporal convolutional networks, transformers, and graph convolutional networks. More broadly, ES-VAE provides a principled framework for learning generative models of longitudinal data on pose shape manifolds, offering improved latent representation and downstream performance compared to existing deep learning approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Elastic Shape Variational Autoencoder (ES-VAE) for skeletal pose trajectories. It employs the transported square-root velocity field (TSRVF) representation on Kendall's shape manifold to remove rigid translations, rotations, global scaling, and temporal rate variability, thereby isolating intrinsic shape dynamics. The encoder incorporates the Riemannian logarithm map into a low-dimensional latent space and the decoder uses the exponential map for reconstruction. Effectiveness is demonstrated on gait-cycle analysis for clinical mobility score prediction and healthy vs. post-stroke classification, plus action recognition on the NTU RGB+D dataset, where ES-VAE outperforms standard VAEs and baselines including TCNs, transformers, and GCNs.
Significance. If the empirical claims hold after addressing the noted gaps, the work supplies a principled geometry-aware extension of VAEs to longitudinal pose data on shape manifolds. It explicitly builds on established TSRVF and Kendall-manifold literature rather than introducing ad-hoc entities, and supplies a concrete framework for generative modeling of motion that could improve latent representations for clinical and recognition tasks.
major comments (2)
- [Abstract] Abstract: The central claim that TSRVF 'inherently removes ... temporal rate variability of sequences, isolating the underlying shape dynamics' without loss of task-relevant information is load-bearing for attributing performance gains to the geometry rather than architecture or preprocessing. No ablation isolating the elastic-alignment component is referenced, which is required because gait mobility scores and NTU action discrimination can depend on execution speed.
- [Experimental evaluation] Experimental evaluation: The abstract reports consistent outperformance but supplies no equations, error bars, dataset sizes, or ablation details. This prevents verification that the reported gains on clinical prediction and action recognition arise from the claimed manifold isolation rather than other factors.
minor comments (2)
- [Methods] The description of how the Riemannian log and exp maps are incorporated into the VAE encoder/decoder could be clarified with an explicit equation or diagram in the methods section.
- Consider adding a short paragraph contrasting ES-VAE with prior manifold-aware VAEs to better situate the contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment in turn below, providing the strongest honest defense of the work while noting where revisions are warranted to improve clarity and verifiability.
read point-by-point responses
-
Referee: [Abstract] The central claim that TSRVF 'inherently removes ... temporal rate variability of sequences, isolating the underlying shape dynamics' without loss of task-relevant information is load-bearing for attributing performance gains to the geometry rather than architecture or preprocessing. No ablation isolating the elastic-alignment component is referenced, which is required because gait mobility scores and NTU action discrimination can depend on execution speed.
Authors: We acknowledge that isolating the contribution of elastic alignment is important for attributing gains specifically to the geometric representation. The TSRVF is a standard construction in the Kendall shape manifold literature whose elastic registration step is mathematically defined to remove timing variability while preserving the intrinsic shape trajectory; this property has been validated across multiple prior studies on gait and action data. Our existing comparisons already contrast ES-VAE against standard VAEs trained on raw (unaligned) skeletal sequences, thereby showing the benefit of the full TSRVF pipeline. To directly respond to the request, we will add a targeted ablation in the revised experimental section that disables the elastic alignment (using SRVF without transport) and reports the resulting drop in performance on both the gait and NTU tasks. We will also add a short discussion noting that, while execution speed can carry information in some settings, the clinical mobility scores and NTU action labels in our evaluation emphasize shape dynamics over pure timing. revision: yes
-
Referee: [Experimental evaluation] The abstract reports consistent outperformance but supplies no equations, error bars, dataset sizes, or ablation details. This prevents verification that the reported gains on clinical prediction and action recognition arise from the claimed manifold isolation rather than other factors.
Authors: The abstract is deliberately concise and therefore omits the detailed equations, dataset statistics, error bars, and ablation tables that appear in the body of the manuscript. Section 3 derives the TSRVF representation together with the Riemannian log and exp maps; Section 4 specifies the gait dataset (subject counts, number of cycles) and the NTU RGB+D splits; Section 5 presents all quantitative results with standard deviations, statistical significance tests, and multiple ablation studies on the manifold components. To improve reader navigation we have added explicit cross-references from the abstract to these sections and inserted a brief clause noting that ablations and error statistics are reported in the main text. We believe these changes address the verification concern while respecting abstract length constraints. revision: partial
Circularity Check
No significant circularity; ES-VAE applies established manifold tools to standard VAE training
full rationale
The derivation begins with the TSRVF representation on Kendall's shape manifold, an established construction from prior shape-analysis literature that removes rigid motions and temporal rate variability by definition of the elastic alignment and square-root velocity field. The ES-VAE then encodes sequences via the Riemannian logarithm map and decodes via the exponential map, which are the standard manifold operations for this representation; these steps are definitional mappings rather than derived predictions. Training follows the usual VAE evidence lower-bound objective on the resulting latent space, and reported gains on gait-score prediction and NTU action recognition are obtained from downstream empirical evaluation on held-out data. No equation or claim reduces the output performance metric to a fitted parameter or self-citation by construction, and the central geometric isolation property is an input assumption whose validity is tested externally rather than presupposed.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption TSRVF representation on Kendall's shape manifold removes rigid motions, scaling, and temporal rate variability while preserving intrinsic shape dynamics
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
This representation inherently removes rigid translations, rotations, and global scaling of shapes, and temporal rate variability of sequences, isolating the underlying shape dynamics.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the reconstruction term uses the squared geodesic distance on the shape manifold
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Stiff knee gait disorders as neuromechanical consequences of spastic hemiplegia in chronic stroke , author=. Toxins , volume=. 2023 , publisher=
work page 2023
-
[2]
Artificial Intelligence in Medicine , volume=
Matching incomplete time series with dynamic time warping: an algorithm and an application to post-stroke rehabilitation , author=. Artificial Intelligence in Medicine , volume=. 2009 , publisher=
work page 2009
-
[3]
Journal of Exercise Rehabilitation , volume=
Application of dynamic time warping algorithm for pattern similarity of gait , author=. Journal of Exercise Rehabilitation , volume=. 2019 , publisher=
work page 2019
-
[4]
IEEE Transactions on Emerging Topics in Computing , volume=
A machine-learning model for automatic detection of movement compensations in stroke patients , author=. IEEE Transactions on Emerging Topics in Computing , volume=. 2020 , publisher=
work page 2020
-
[5]
Journal of Biopharmaceutical Statistics , volume=
Functional modeling of pedaling kinematics for the Stroke patients , author=. Journal of Biopharmaceutical Statistics , volume=. 2020 , publisher=
work page 2020
-
[6]
Objective Assessment of Upper-Limb Mobility for Poststroke Rehabilitation , year=
Zhang, Zhe and Fang, Qiang and Gu, Xudong , journal=. Objective Assessment of Upper-Limb Mobility for Poststroke Rehabilitation , year=
-
[7]
A full-body motion capture gait dataset of 138 able-bodied adults across the life span and 50 stroke survivors , author=. Scientific Data , volume=. 2023 , publisher=
work page 2023
-
[8]
Eichler, Nadav and Hel-Or, Hagit and Shimshoni, Ilan and Itah, Dorit and Gross, Bella and Raz, Shmuel , journal=. 2018 , publisher=
work page 2018
-
[9]
Stroke walking and balance characteristics via principal component analysis , author=. Scientific Reports , volume=. 2024 , publisher=
work page 2024
- [10]
-
[11]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Action recognition using rate-invariant analysis of skeletal shape trajectories , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2016 , publisher=
work page 2016
-
[12]
Hosni, Nadia and Drira, Hassen and Chaieb, Faten and Amor, Boulbaba Ben , booktitle=. 3. 2018 , organization=
work page 2018
-
[13]
Geometric deep neural network using rigid and non-rigid transformations for human action recognition , author=. Proc. IEEE/CVF Int. Conf. Computer Vision (ICCV) , pages=
-
[14]
Kingma, Diederik P and Welling, Max , journal=. Auto-encoding variational
-
[15]
Learning weighted submanifolds with variational autoencoders and
Miolane, Nina and Holmes, Susan , booktitle=. Learning weighted submanifolds with variational autoencoders and
-
[16]
Advances in Neural Information Processing Systems , volume=
A geometric perspective on variational autoencoders , author=. Advances in Neural Information Processing Systems , volume=
-
[17]
Deep generative modeling for single-cell transcriptomics , author=. Nature Methods , volume=. 2018 , publisher=
work page 2018
-
[18]
Learning low-dimensional representations of shape data sets with diffeomorphic autoencoders , author=. Proc. Int. Conf. Information Processing in Medical Imaging (IPMI) , pages=. 2019 , organization=
work page 2019
-
[19]
Dummer, Sven and Strisciuglio, Nicola and Brune, Christoph , journal=. 2024 , publisher=
work page 2024
-
[20]
Dummer, Sven and Brune, Christoph and Strisciuglio, Nicola , howpublished=
-
[21]
Gatti, Anthony A and Blankemeier, Louis and Van Veen, Dave and Hargreaves, Brian and Delp, Scott L and Gold, Garry E and Kogan, Feliks and Chaudhari, Akshay S , journal=. 2025 , publisher=
work page 2025
-
[22]
Fu, Yihang and He, Lifang and Chen, Qingyu , journal=
-
[23]
Approximation capabilities of multilayer feedforward networks , author=. Neural Networks , volume=. 1991 , publisher=
work page 1991
-
[24]
Temporal convolutional networks for action segmentation and detection , author=. Proc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR) , pages=
-
[25]
Long short-term memory , author=. Neural Computation , volume=. 1997 , publisher=
work page 1997
-
[26]
Advances in Neural Information Processing Systems , volume=
Attention is all you need , author=. Advances in Neural Information Processing Systems , volume=
-
[27]
Shahroudy, Amir and Liu, Jun and Ng, Tian-Tsong and Wang, Gang , booktitle=
-
[28]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
Are Spatial-Temporal Graph Convolution Networks for Human Action Recognition Over-Parameterized? , author=. Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
-
[29]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Adaptive hyper-graph convolution network for skeleton-based human action recognition with virtual connections , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[30]
Spatial temporal graph convolutional networks for skeleton-based action recognition , author=. Proc. AAAI Conf. Artificial Intelligence , volume=
-
[31]
Locomotor trajectories of stroke patients during oriented gait and turning , author=. PLoS One , volume=. 2016 , publisher=
work page 2016
-
[32]
International Conference on Learning Representations , year=
Conditional Image Generation by Conditioning Variational Auto-Encoders , author=. International Conference on Learning Representations , year=
-
[33]
IEEE transactions on pattern analysis and machine intelligence , volume=
Human action recognition from various data modalities: A review , author=. IEEE transactions on pattern analysis and machine intelligence , volume=. 2022 , publisher=
work page 2022
-
[34]
Dynamic programming and optimal control: Volume I , author=. 2012 , publisher=
work page 2012
- [35]
-
[36]
The Journal of Engineering , volume=
Vision skeleton trajectory based motion assessment system for healthcare rehabilitation , author=. The Journal of Engineering , volume=. 2020 , publisher=
work page 2020
-
[37]
Hakim, Tal and Shimshoni, Ilan , booktitle=. A-
-
[38]
Benchmarking Skeleton-based Motion Encoder Models for Clinical Applications: Estimating
Adeli, Vida and Mehraban, Soroush and Ballester, Irene and Zarghami, Yasamin and Sabo, Andrea and Iaboni, Andrea and Taati, Babak , booktitle=. Benchmarking Skeleton-based Motion Encoder Models for Clinical Applications: Estimating. 2024 , organization=
work page 2024
-
[39]
Statistical shape analysis: with applications in R , author=. 2016 , publisher=
work page 2016
-
[40]
Journal of Machine Learning Research , year =
Nina Miolane and Nicolas Guigui and Alice Le Brigant and Johan Mathe and Benjamin Hou and Yann Thanwerdas and Stefan Heyder and Olivier Peltre and Niklas Koep and Hadi Zaatiti and Hatem Hajri and Yann Cabanes and Thomas Gerald and Paul Chauchat and Christian Shewmake and Daniel Brooks and Bernhard Kainz and Claire Donnat and Susan Holmes and Xavier Pennec...
-
[41]
Computational Statistics & Data Analysis , volume=
Generative models for functional data using phase and amplitude separation , author=. Computational Statistics & Data Analysis , volume=. 2013 , publisher=
work page 2013
-
[42]
NeurIPS 2022 Workshop on Symmetry and Geometry in Neural Representations , year=
Kendall shape-vae: Learning shapes in a generative framework , author=. NeurIPS 2022 Workshop on Symmetry and Geometry in Neural Representations , year=
work page 2022
-
[43]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Data augmentation in high dimensional low sample size setting using a geometry-based variational autoencoder , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2022 , publisher=
work page 2022
-
[44]
IEEE Transactions on Image Processing , volume=
Vtae: Variational transformer autoencoder with manifolds learning , author=. IEEE Transactions on Image Processing , volume=. 2023 , publisher=
work page 2023
-
[45]
arXiv preprint arXiv:2002.05227 , year=
Variational autoencoders with riemannian brownian motion priors , author=. arXiv preprint arXiv:2002.05227 , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.