Manipulating Tangible Virtual Object Dynamics to Promote Learning of Precision Force Generation
Pith reviewed 2026-06-29 16:54 UTC · model grok-4.3
The pith
Antisymmetric Gaussian spring dynamics improve force accuracy during training compared to linear dynamics
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
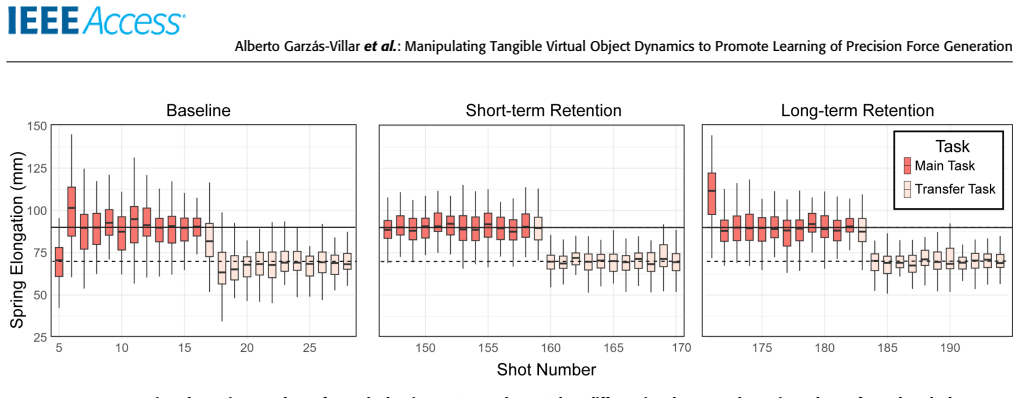
By setting the virtual spring's force-elongation relationship to an antisymmetric Gaussian function with zero derivative at the target release force, participants achieved higher force accuracy during training sessions than with a linear relationship, whereas a standard Gaussian relationship only showed improvement toward the end of training; however, no differences emerged in long-term retention, and performance transferred based on elongation rather than force.
What carries the argument
The antisymmetric Gaussian force-elongation function with zero derivative at the release target force
If this is right
- The antisymmetric Gaussian group maintained higher force accuracy throughout the training period compared with the linear group.
- The Gaussian group only outperformed the linear group in later training blocks.
- No significant retention differences appeared across the three spring types after training ended.
- Participants relied primarily on learned target elongation rather than target force in transfer tasks with changed stiffness.
Where Pith is reading between the lines
- The approach could be adapted to minimize position cues so that force learning becomes more independent of proprioception.
- Personality scores that correlate with exploration behavior might be used to select or adjust dynamics for individual learners.
- Extending the task to clinical populations would test whether the training gains survive when somatosensory deficits are present.
Load-bearing premise
That improved training accuracy in healthy participants on this curling task will generalize to neurological patients and that the setup supports learning of force independent of position cues.
What would settle it
A transfer test in which removing or altering position cues eliminates the accuracy advantage of the antisymmetric Gaussian dynamics.
Figures



read the original abstract
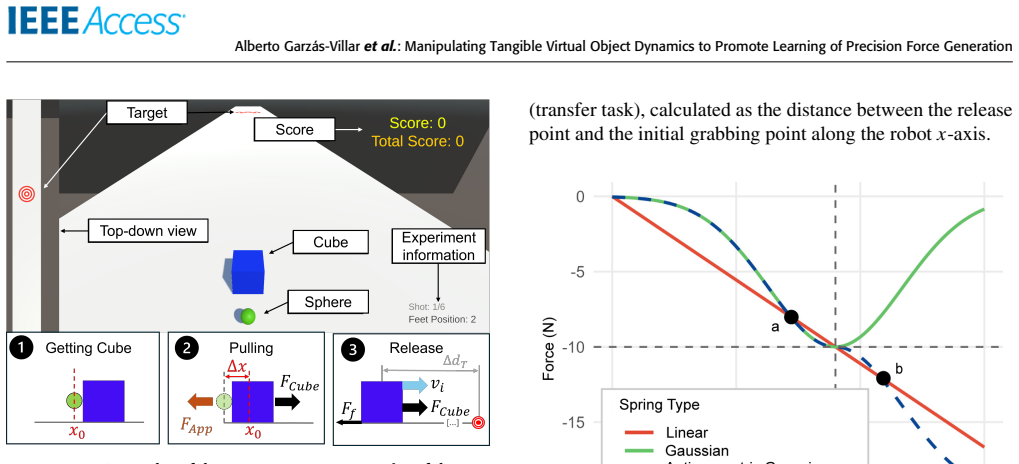
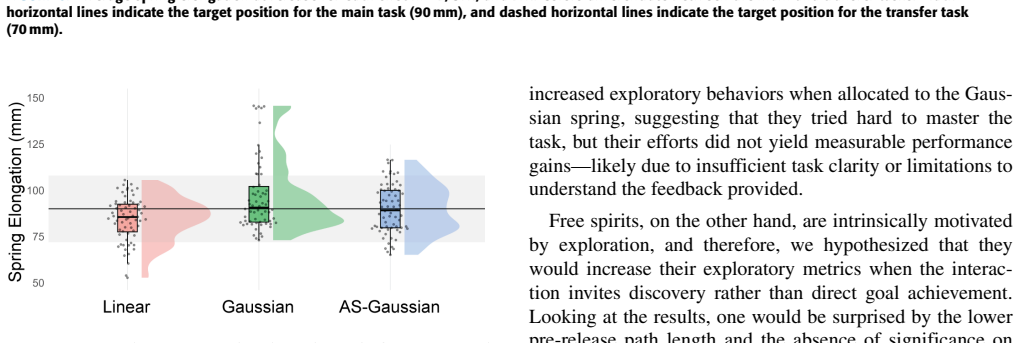
Robotic haptic devices combined with virtual reality offer novel opportunities to train fine force generation, an essential yet overlooked component of post-stroke rehabilitation. This study proposes that manipulating the rendered dynamics of tangible virtual objects can be leveraged to train precise force control while engaging the somatosensory system. We conducted an experiment with fifty healthy participants who performed a curling-inspired task in which they had to stretch a virtual spring to generate a target release force to propel the stone to a predefined location on the ice sheet. During training, the spring's force-elongation relationship was modeled as either a linear or non-linear function, i.e., a Gaussian or antisymmetric Gaussian (AS-Gaussian) function with zero derivative at the release target force. Results indicate that the AS-Gaussian group consistently achieved higher force accuracy during training than the linear group, while the Gaussian group only outperformed the linear group toward the end of training. Analysis of personality traits revealed that higher Free Spirit scores were associated with poorer performance and reduced task exploration under Gaussian dynamics, whereas higher Transform-of-Challenge scores correlated with increased exploration. Despite these training effects, no significant differences in long-term retention were found across spring types or personality traits. Participants primarily relied on learned target elongation rather than target force, as evidenced by performance in a transfer task with a different stiffness but the same target force. While promising for somatosensory neurorehabilitation, these methods require refinement to reduce reliance on proprioceptive cues before testing with neurological patients.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reports results from an experiment with 50 healthy participants performing a VR curling-inspired task in which they stretch a virtual spring to generate a target release force. Three spring force-elongation models were compared during training (linear, Gaussian, antisymmetric Gaussian with zero derivative at target force). The AS-Gaussian group showed consistently higher force accuracy than linear; Gaussian outperformed linear only late in training. No retention differences were found across conditions. A transfer task (different stiffness, same target force) revealed that participants primarily relied on learned target elongation rather than force. Personality traits modulated exploration under certain dynamics. The authors conclude the approach is promising for somatosensory neurorehabilitation but requires refinement to reduce proprioceptive reliance before patient testing.
Significance. If the training advantage can be shown to reflect genuine force-specific learning rather than position memory, the work could inform design of haptic interfaces for precision force training in rehabilitation. The explicit acknowledgment of position reliance and null retention results already limits the strength of the force-learning claim; the personality-trait correlations are secondary and exploratory.
major comments (2)
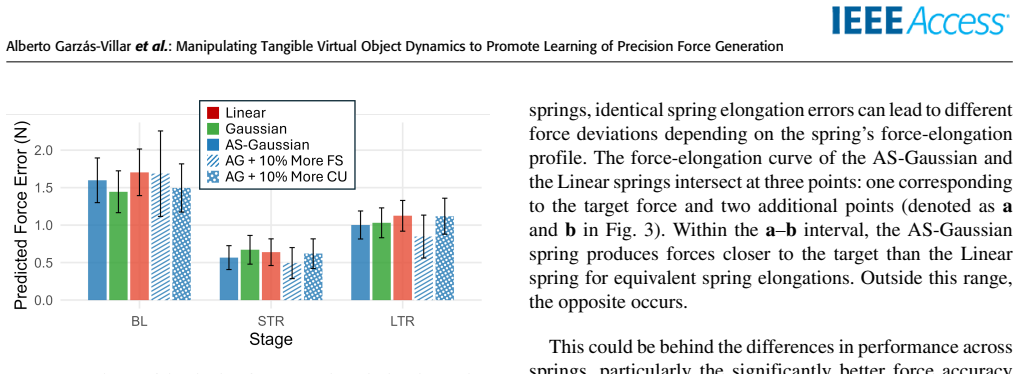
- [Abstract] Abstract (and implied Results section): The transfer-task finding that participants 'primarily relied on learned target elongation rather than target force' directly undermines the central claim that the manipulated dynamics promote precision force generation via somatosensory force sensing. Because the accuracy advantage during training may therefore reflect position rather than force memory, the interpretation that AS-Gaussian dynamics improve force control requires either additional evidence isolating force from position or a reframing of the contribution.
- [Abstract] Abstract: No retention differences are reported across spring types. This null result is load-bearing for any claim of lasting improvements in force control and should be accompanied by effect sizes, power analysis, or explicit discussion of whether the training protocol was insufficient to produce retention.
minor comments (1)
- [Abstract] Abstract lacks any statistical details (p-values, effect sizes, error bars, or sample-size justification) for the reported group differences, making it impossible to assess the reliability of the training-accuracy claims from the provided text alone.
Simulated Author's Rebuttal
We thank the referee for these insightful comments, which help clarify the scope of our claims. We respond to each major point below and indicate planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract (and implied Results section): The transfer-task finding that participants 'primarily relied on learned target elongation rather than target force' directly undermines the central claim that the manipulated dynamics promote precision force generation via somatosensory force sensing. Because the accuracy advantage during training may therefore reflect position rather than force memory, the interpretation that AS-Gaussian dynamics improve force control requires either additional evidence isolating force from position or a reframing of the contribution.
Authors: The manuscript already foregrounds this exact finding in the abstract and qualifies the conclusions accordingly. The training-phase accuracy advantage under AS-Gaussian dynamics is still a genuine effect of the force-elongation mapping, even if participants ultimately used position cues; the dynamics manipulation demonstrably altered exploration and performance during acquisition. We will reframe the introduction and discussion to present the work as demonstrating how non-linear dynamics can shape training behavior and performance, while explicitly limiting claims about isolated force sensing. No new data isolating force from position are available, so the contribution will be reframed rather than overstated. revision: partial
-
Referee: [Abstract] Abstract: No retention differences are reported across spring types. This null result is load-bearing for any claim of lasting improvements in force control and should be accompanied by effect sizes, power analysis, or explicit discussion of whether the training protocol was insufficient to produce retention.
Authors: We agree that the null retention result requires fuller statistical context. The revised manuscript will report effect sizes for all retention comparisons, include a post-hoc power analysis, and add explicit discussion of whether the single-session training protocol may have been insufficient to produce measurable retention. These additions will strengthen the interpretation without altering the reported findings. revision: yes
Circularity Check
No circularity: purely empirical experiment with direct measurements
full rationale
The paper reports results from a human-subject experiment comparing force accuracy under linear vs. nonlinear (Gaussian, AS-Gaussian) spring dynamics in a curling task. No derivation chain, equations, or fitted parameters are presented that reduce to their own inputs. All claims rest on measured participant performance data, retention tests, and transfer-task observations. Self-citations, if present, are not load-bearing for any central result. This matches the default expectation for an empirical study with no mathematical reductions.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard statistical assumptions for group comparisons and significance testing
Reference graph
Works this paper leans on
-
[1]
V . L. Feiginet al., ‘‘Global, regional, and national burden of stroke and its risk factors, 1990–2021: a systematic analysis for the global burden of disease study 2021,’’The Lancet Neurology, vol. 23, no. 10, pp. 973–1003, 2024
1990
-
[2]
L. A. Connell, N. Lincoln, and K. Radford, ‘‘Somatosensory impairment after stroke: frequency of different deficits and their recovery,’’Clinical rehabilitation, vol. 22, no. 8, pp. 758–767, 2008
2008
-
[3]
Kang and J
N. Kang and J. H. Cauraugh, ‘‘Force control in chronic stroke,’’Neuro- science & Biobehavioral Reviews, vol. 52, pp. 38–48, 2015
2015
-
[4]
B. M. Quaney, S. Perera, R. Maletsky, C. W. Luchies, and R. J. Nudo, ‘‘Impaired grip force modulation in the ipsilesional hand after unilateral middle cerebral artery stroke,’’Neurorehabilitation and neural repair, vol. 19, no. 4, pp. 338–349, 2005
2005
-
[5]
Lodha, S
N. Lodha, S. K. Naik, S. A. Coombes, and J. H. Cauraugh, ‘‘Force control and degree of motor impairments in chronic stroke,’’Clinical Neurophysi- ology, vol. 121, no. 11, pp. 1952–1961, 2010
1952
-
[6]
Bolognini, C
N. Bolognini, C. Russo, and D. J. Edwards, ‘‘The sensory side of post- stroke motor rehabilitation,’’Restorative neurology and neuroscience, vol. 34, no. 4, pp. 571–586, 2016
2016
-
[7]
Gassert and V
R. Gassert and V . Dietz, ‘‘Rehabilitation robots for the treatment of senso- rimotor deficits: a neurophysiological perspective,’’Journal of neuroengi- neering and rehabilitation, vol. 15, no. 1, p. 46, 2018
2018
-
[8]
J. H. Lee, H. Lee, H. Kim, R.-K. Kim, T. L. Lee, D.-K. Ko, H. Lee, and N. Kang, ‘‘Resistance band training with functional electrical stimulation improves force control capabilities in older adults: a preliminary study,’’ EXCLI journal, vol. 23, p. 130, 2024
2024
-
[9]
M. N. McDonnell, S. L. Hillier, T. S. Miles, P . D. Thompson, and M. C. Ridding, ‘‘Influence of combined afferent stimulation and task-specific training following stroke: a pilot randomized controlled trial,’’Neurore- habilitation and neural repair, vol. 21, no. 5, pp. 435–443, 2007
2007
-
[10]
Villar Ortega, K
E. Villar Ortega, K. A. Buetler, E. A. Aksöz, and L. Marchal-Crespo, ‘‘Enhancing touch sensibility with sensory electrical stimulation and sen- sory retraining,’’Journal of NeuroEngineering and Rehabilitation, vol. 21, no. 1, p. 79, 2024
2024
-
[11]
Dafotakis, C
M. Dafotakis, C. Grefkes, S. B. Eickhoff, H. Karbe, G. R. Fink, and D. A. Nowak, ‘‘Effects of rtms on grip force control following subcortical stroke,’’Experimental neurology, vol. 211, no. 2, pp. 407–412, 2008
2008
-
[12]
Stefan, R
K. Stefan, R. Gentner, D. Zeller, S. Dang, and J. Classen, ‘‘Theta-burst stimulation: remote physiological and local behavioral after-effects,’’Neu- roimage, vol. 40, no. 1, pp. 265–274, 2008
2008
-
[13]
V oelcker-Rehage and B
C. V oelcker-Rehage and B. Godde, ‘‘High frequency sensory stimulation improves tactile but not motor performance in older adults,’’Motor control, vol. 14, no. 4, pp. 460–477, 2010
2010
-
[14]
J. W. Krakauer, A. M. Hadjiosif, J. Xu, A. L. Wong, and A. M. Haith, ‘‘Motor learning,’’Comprehensive physiology, vol. 9, no. 2, pp. 613–663, 2019
2019
-
[15]
B. M. Quaney, J. He, G. Timberlake, K. Dodd, and C. Carr, ‘‘Visuomo- tor training improves stroke-related ipsilesional upper extremity impair- ments,’’Neurorehabilitation and neural repair, vol. 24, no. 1, pp. 52–61, 2010
2010
-
[16]
Kurillo, A
G. Kurillo, A. Zupan, and T. Bajd, ‘‘Force tracking system for the as- sessment of grip force control in patients with neuromuscular diseases,’’ Clinical Biomechanics, vol. 19, no. 10, pp. 1014–1021, 2004
2004
-
[17]
J. Guo, T. Liu, and J. Wang, ‘‘Effects of auditory feedback on fine motor output and corticomuscular coherence during a unilateral finger pinch task,’’Frontiers in Neuroscience, vol. 16, p. 896933, 2022
2022
-
[18]
Hsu, C.-F
H.-Y . Hsu, C.-F. Lin, F.-C. Su, H.-T. Kuo, H.-Y . Chiu, and L.-C. Kuo, ‘‘Clinical application of computerized evaluation and re-education biofeed- back prototype for sensorimotor control of the hand in stroke patients,’’ Journal of neuroengineering and rehabilitation, vol. 9, no. 1, p. 26, 2012
2012
-
[19]
P . S. Lum, C. G. Burgar, and P . C. Shor, ‘‘Evidence for improved muscle activation patterns after retraining of reaching movements with the mime robotic system in subjects with post-stroke hemiparesis,’’IEEE Transac- tions on Neural Systems and Rehabilitation Engineering, vol. 12, no. 2, pp. 186–194, 2004
2004
-
[20]
Fischer, L
H. Fischer, L. Kahn, E. Pelosin, H. Roth, J. Barbas, W. Z. Rymer, and D. Reinkensmeyer, ‘‘Can robot-assisted therapy promote generalization of motor learning following stroke?: preliminary results,’’ inThe First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, 2006. BioRob 2006.IEEE, 2006, pp. 865–868
2006
-
[21]
J. L. Emken and D. J. Reinkensmeyer, ‘‘Robot-enhanced motor learning: accelerating internal model formation during locomotion by transient dy- namic amplification,’’IEEE Transactions on Neural Systems and Rehabil- itation Engineering, vol. 13, no. 1, pp. 33–39, 2005
2005
-
[22]
J. L. Patton and F. A. Mussa-Ivaldi, ‘‘Robot-assisted adaptive training: custom force fields for teaching movement patterns,’’IEEE Transactions on Biomedical Engineering, vol. 51, no. 4, pp. 636–646, 2004
2004
-
[23]
J. L. Patton, M. E. Stoykov, M. Kovic, and F. A. Mussa-Ivaldi, ‘‘Evaluation of robotic training forces that either enhance or reduce error in chronic hemiparetic stroke survivors,’’Experimental brain research, vol. 168, no. 3, pp. 368–383, 2006
2006
-
[24]
Rauter, R
G. Rauter, R. Sigrist, L. Marchal-Crespo, H. V allery, R. Riener, and P . Wolf, ‘‘Assistance or challenge? filling a gap in user-cooperative control,’’ in 2011 IEEE/RSJ International Conference on Intelligent Robots and Sys- tems, 2011, pp. 3068–3073
2011
-
[25]
Shadmehr and F
R. Shadmehr and F. A. Mussa-Ivaldi, ‘‘Adaptive representation of dynam- ics during learning of a motor task,’’Journal of neuroscience, vol. 14, no. 5, pp. 3208–3224, 1994
1994
-
[26]
R. Rätz, F. Conti, I. Thaler, R. M. Müri, and L. Marchal-Crespo, ‘‘Enhanc- ing stroke rehabilitation with whole-hand haptic rendering: development and clinical usability evaluation of a novel upper-limb rehabilitation de- vice,’’Journal of NeuroEngineering and Rehabilitation, vol. 21, no. 1, p. 172, 2024
2024
-
[27]
Basalp, P
E. Basalp, P . Wolf, and L. Marchal-Crespo, ‘‘Haptic training: which types facilitate (re) learning of which motor task and for whom? answers by a review,’’IEEE transactions on haptics, vol. 14, no. 4, pp. 722–739, 2021
2021
-
[28]
Salisbury, F
K. Salisbury, F. Conti, and F. Barbagli, ‘‘Haptic rendering: introductory concepts,’’IEEE computer graphics and applications, vol. 24, no. 2, pp. 24–32, 2004
2004
-
[29]
Ritter, M
C. Ritter, M. Senne, N. Berberich, K. Yilmazer, N. Paredes-Acuña, and G. Cheng, ‘‘Grip force dynamics during exoskeleton-assisted and virtual grasping,’’ in2023 International Conference on Rehabilitation Robotics (ICORR). IEEE, 2023, pp. 1–6
2023
-
[30]
F. C. Huang and J. L. Patton, ‘‘Augmented dynamics and motor exploration as training for stroke,’’IEEE Transactions on Biomedical Engineering, vol. 60, no. 3, pp. 838–844, 2012
2012
-
[31]
Ö. Özen, K. A. Buetler, and L. Marchal-Crespo, ‘‘Promoting motor vari- ability during robotic assistance enhances motor learning of dynamic tasks,’’Frontiers in neuroscience, vol. 14, p. 600059, 2021
2021
-
[32]
Marchal-Crespo and D
L. Marchal-Crespo and D. J. Reinkensmeyer, ‘‘Review of control strategies for robotic movement training after neurologic injury,’’Journal of neuro- engineering and rehabilitation, vol. 6, no. 1, pp. 1–15, 2009
2009
-
[33]
Garzás-Villar, C
A. Garzás-Villar, C. Boersma, A. Derumigny, J. M. Prendergast, A. Zgonnikov, J. M. Cramm, and L. Marchal-Crespo, ‘‘The interplay between haptic guidance and personality traits in robotic-assisted motor learning,’’Journal of NeuroEngineering and Rehabilitation, vol. 22, no. 1, p. 238, 2025
2025
-
[34]
Garzás-Villar, C
A. Garzás-Villar, C. Boersma, A. Derumigny, A. Zgonnikov, and L. Marchal-Crespo, ‘‘Personality traits modulate the effect of hap- tic guidance during robotic-assisted motor training,’’ in2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob). IEEE, 2024, pp. 1023–1028
2024
-
[35]
D. C. K. Tse, V . W. Lau, R. Perlman, and M. McLaughlin, ‘‘The develop- ment and validation of the autotelic personality questionnaire,’’Journal of personality assessment, vol. 102, no. 1, pp. 88–101, 2020
2020
-
[36]
Marczewski, ‘‘Even ninja monkeys like to play,’’London: Blurb Inc, vol
A. Marczewski, ‘‘Even ninja monkeys like to play,’’London: Blurb Inc, vol. 1, no. 1, p. 28, 2015
2015
-
[37]
J. B. Rotter, ‘‘Generalized expectancies for internal versus external con- trol of reinforcement.’’Psychological monographs: General and applied, vol. 80, no. 1, p. 1, 1966
1966
-
[38]
I. V . Piryankova, H. Y . Wong, S. A. Linkenauger, C. Stinson, M. R. Longo, H. H. Bülthoff, and B. J. Mohler, ‘‘Owning an overweight or underweight body: distinguishing the physical, experienced and virtual body,’’PloS one, vol. 9, no. 8, p. e103428, 2014
2014
-
[39]
H. G. Wu, Y . R. Miyamoto, L. N. G. Castro, B. P . Ölveczky, and M. A. Smith, ‘‘Temporal structure of motor variability is dynamically regulated and predicts motor learning ability,’’Nature neuroscience, vol. 17, no. 2, pp. 312–321, 2014
2014
-
[40]
Bernardoni, Ö
F. Bernardoni, Ö. Özen, K. Buetler, and L. Marchal-Crespo, ‘‘Virtual reality environments and haptic strategies to enhance implicit learning and motivation in robot-assisted training,’’ in2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), 2019, pp. 760–765
2019
-
[41]
J. W. Krakauer, P . Mazzoni, A. Ghazizadeh, R. Ravindran, and R. Shad- mehr, ‘‘Generalization of motor learning depends on the history of prior action,’’PLoS biology, vol. 4, no. 10, p. e316, 2006. VOLUME 11, 2023 19 Alberto Garzás-Villaret al.: Manipulating Tangible Virtual Object Dynamics to Promote Learning of Precision Force Generation
2006
-
[42]
Branscheidt, P
M. Branscheidt, P . Kassavetis, M. Anaya, D. Rogers, H. D. Huang, M. A. Lindquist, and P . Celnik, ‘‘Fatigue induces long-lasting detrimental changes in motor-skill learning,’’Elife, vol. 8, p. e40578, 2019. ALBERTO GARZÁS-VILLARis a Ph.D. Candidate at the Delft University of Technology (The Nether- lands). He is also affiliated with the Department of Soc...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.