Robo-Blocks: Generative Scaffolding in End-User Design and Programming of Social Robots
Pith reviewed 2026-06-29 10:19 UTC · model grok-4.3
The pith
Robo-Blocks supplies LLM-generated narratives that link novices' high-level ideas to executable social-robot behaviors in a block interface.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Through deployment with novices, the authors discovered emerging user personas and usage patterns for generative scaffolding and showed how this scaffolding shapes end-user design and programming strategies.
What carries the argument
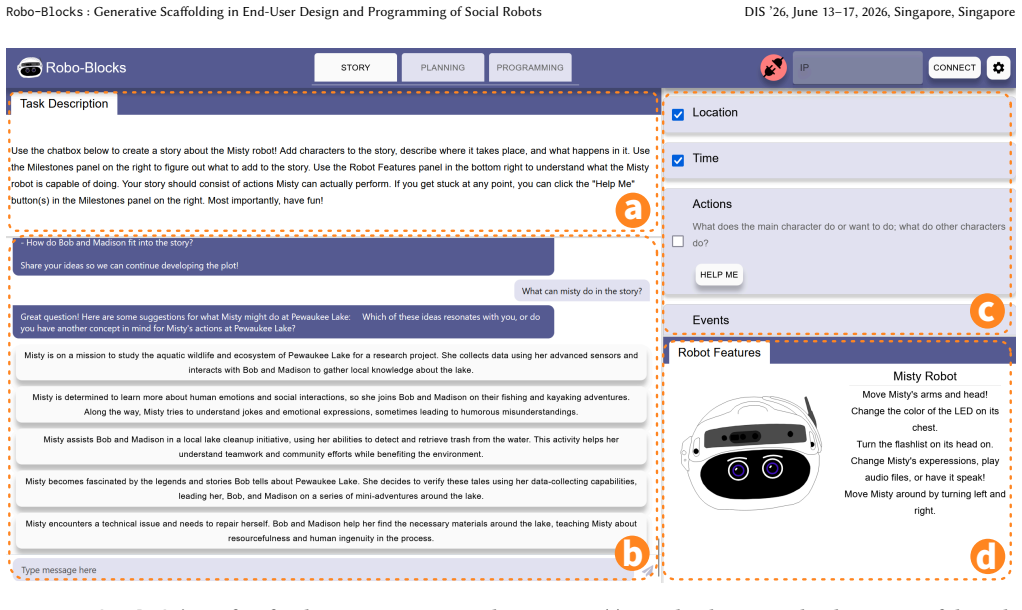
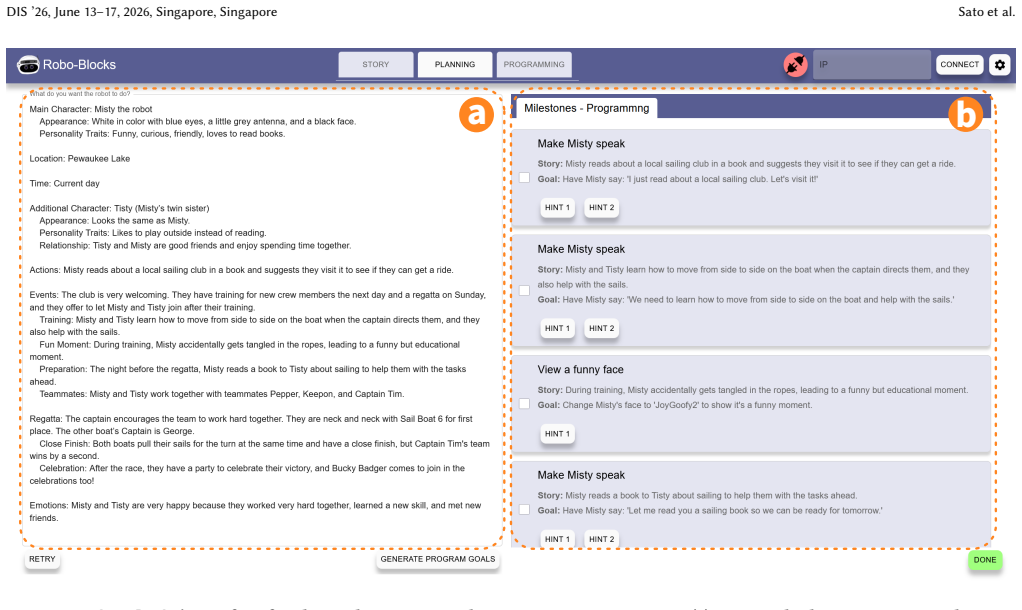
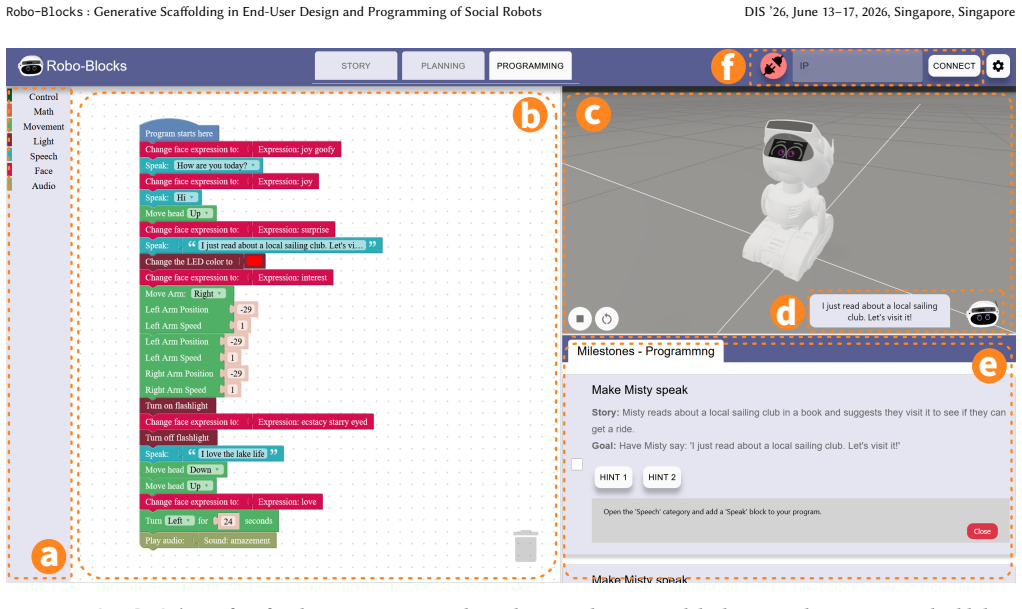
Generative scaffolding: LLM-produced structured narratives that connect high-level ideas to executable robot behaviors inside a block-based editor.
If this is right
- Novice users adopt distinct personas when interacting with the generative narratives.
- The scaffolding directly influences the sequence and focus of design and programming decisions.
- Structured narratives can serve as an intermediate layer between natural-language intent and code blocks.
- Design guidelines emerge for balancing LLM assistance with opportunities for user ownership.
Where Pith is reading between the lines
- Similar narrative scaffolding could be tested in other end-user domains such as game or IoT scripting to check transfer of the observed patterns.
- Longer-term studies could track whether repeated exposure to the narratives increases or decreases independent debugging skill.
- The personas identified may predict which users benefit most from narrative support versus direct code editing.
Load-bearing premise
That LLM-generated structured narratives can reliably connect high-level ideas to executable robot behaviors in a manner that develops rather than supplants novice programming skills.
What would settle it
A controlled comparison in which novices using Robo-Blocks show no measurable gain in ability to create or debug robot programs independently compared with novices using a non-LLM block editor after equivalent practice time.
Figures

read the original abstract
Programming social robots is challenging for novice robot programmers due to required expertise in planning, interaction design, and programming. While large language models (LLMs) hold significant promise through code generation from natural-language descriptions, they can obscure critical elements of programming and supplant designer intent, eventually resulting in over-reliance instead of developing programming skills. In this paper, we explore how LLM-based social-robot-programming tools can support novice robot programmers through a Research through Design (RtD) process. We designed and prototyped Robo-Blocks, a block-based programming environment that leverages LLMs to offer novice robot programmers generative scaffolding through structured narratives that connect high-level ideas to executable robot behaviors. Through deployment with novices, we discovered emerging user personas and usage patterns for generative scaffolding and showed how this scaffolding shapes end-user design and programming strategies. We present design insights for the effective use of generative scaffolding and its integration into the practice of social-robot programming.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Robo-Blocks, a block-based programming environment that uses LLMs to generate structured narratives as generative scaffolding, connecting high-level ideas to executable robot behaviors for novice social-robot programmers. Through a Research through Design process and a deployment study with novices, the authors report the emergence of user personas and usage patterns, demonstrate how the scaffolding shapes end-user design and programming strategies, and distill design insights for effective integration of such scaffolding.
Significance. If the deployment findings hold, the work offers timely, practice-oriented contributions to HCI and end-user programming by showing how LLM assistance can be structured to support rather than replace novice skills in a complex domain (social-robot interaction design and programming). The persona and pattern discoveries provide concrete, actionable guidance for tool builders; the RtD framing is appropriate for this type of design-knowledge contribution.
major comments (1)
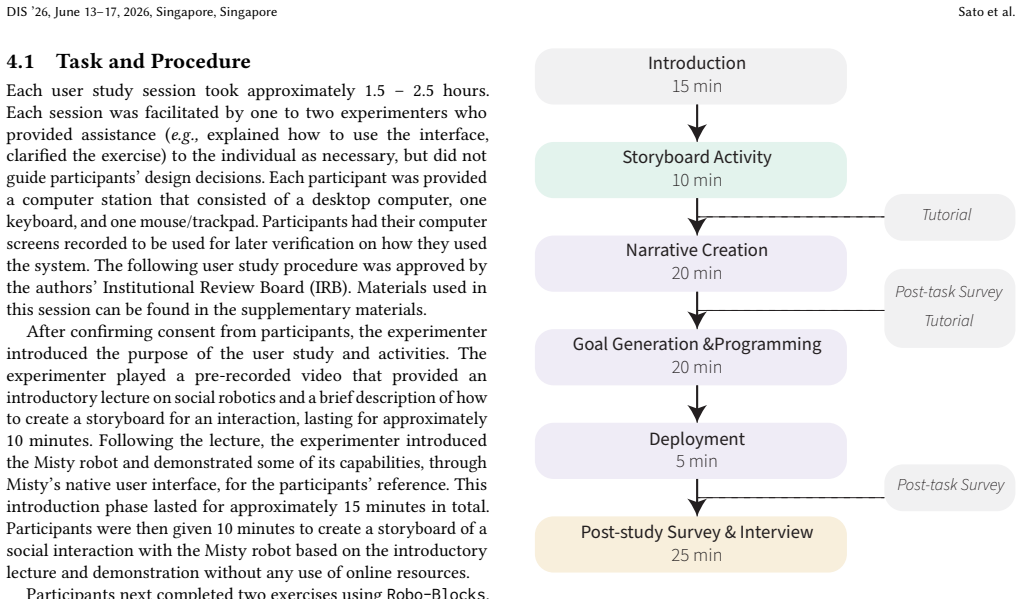
- [Deployment section] Deployment section (and abstract): the manuscript states that deployment with novices produced personas, usage patterns, and evidence that scaffolding shapes strategies, yet supplies no information on participant count, recruitment, session protocols, data collection instruments, or analysis methods. These details are load-bearing for the central empirical claims and must be supplied before the strength of the reported discoveries can be assessed.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We agree that the methodological details of the deployment study are essential to substantiate the central empirical claims and will provide them in the revision.
read point-by-point responses
-
Referee: [Deployment section] Deployment section (and abstract): the manuscript states that deployment with novices produced personas, usage patterns, and evidence that scaffolding shapes strategies, yet supplies no information on participant count, recruitment, session protocols, data collection instruments, or analysis methods. These details are load-bearing for the central empirical claims and must be supplied before the strength of the reported discoveries can be assessed.
Authors: We agree that these details are missing from the current manuscript and are necessary for evaluating the reported findings. In the revised version we will expand the Deployment section with a complete methods description covering participant count, recruitment, session protocols, data collection instruments, and analysis methods, and will update the abstract accordingly to ensure transparency. revision: yes
Circularity Check
No significant circularity in qualitative RtD study
full rationale
The paper is a Research through Design study that reports empirical observations of user personas, usage patterns, and strategy shaping from novice deployments of the Robo-Blocks prototype. No equations, fitted parameters, derivations, or mathematical claims exist that could reduce to inputs by construction. Central claims rest on direct study observations rather than self-citation chains, ansatzes, or renamed prior results. This matches the default expectation of no circularity for self-contained qualitative work.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLMs can be leveraged to offer generative scaffolding through structured narratives that connect high-level ideas to executable robot behaviors.
Reference graph
Works this paper leans on
-
[1]
Parastoo Abtahi, Neha Sharma, James A Landay, and Sean Follmer. 2020. Presenting and exploring challenges in human-robot interaction design through bodystorming. InDesign thinking research: Interrogating the doing. Springer, 327–344. https://doi.org/10.1007/978-3-030-62037-0_15
-
[2]
Saeema Ahmed, Ken M Wallace, and Lucienne T Blessing. 2003. Understanding the differences between how novice and experienced designers approach design tasks.Research in engineering design14, 1 (2003), 1–11. https://doi.org/10.1007/ s00163-002-0023-z
2003
-
[3]
Gopika Ajaykumar, Maureen Steele, and Chien-Ming Huang. 2021. A Survey on End-User Robot Programming.ACM Comput. Surv.54, 8, Article 164 (Oct. 2021), 36 pages. https://doi.org/10.1145/3466819
-
[4]
Caspersen, and Jesper Mosegaard
Peter Bøgh Andersen, Jens Bennedsen, Steffen Brandorff, Michael E. Caspersen, and Jesper Mosegaard. 2003. Teaching programming to liberal arts students: a narrative media approach.SIGCSE Bull.35, 3 (June 2003), 109–113. https: //doi.org/10.1145/961290.961543
-
[5]
Robert W. Andrews, J. Mason Lilly, Divya Srivastava, and Karen M. Feigh. 2023. The role of shared mental models in human-AI teams: a theoretical review.Theo- retical Issues in Ergonomics Science24, 2 (2023), 129–175. https://doi.org/10.1080/ 1463922X.2022.2061080 arXiv:https://doi.org/10.1080/1463922X.2022.2061080
-
[6]
Calderita, Pablo Bustos, and Luis J
Pilar Bachiller-Burgos, Iván Barbecho, Luis V. Calderita, Pablo Bustos, and Luis J. Manso. 2020. LearnBlock: A Robot-Agnostic Educational Programming Tool. IEEE Access8 (2020), 30012–30026. https://doi.org/10.1109/ACCESS.2020.2972410
-
[7]
Linden J Ball, J St BT Evans, and Ian Dennis. 1994. Cognitive processes in engineering design: A longitudinal study.Ergonomics37, 11 (1994), 1753–1786. https://doi.org/10.1080/00140139408964950
-
[8]
Sara Beschi, Daniela Fogli, and Fabio Tampalini. 2019. CAPIRCI: A Multi-modal System for Collaborative Robot Programming. InEnd-User Development, Alessio Malizia, Stefano Valtolina, Anders Morch, Alan Serrano, and Andrew Stratton (Eds.). Springer International Publishing, Cham, 51–66. https://doi.org/10.1007/ 978-3-030-24781-2_4
2019
-
[9]
Cynthia Breazeal. 2003. Toward sociable robots.Robotics and Autonomous Systems 42, 3 (2003), 167–175. https://doi.org/10.1016/S0921-8890(02)00373-1 Socially Interactive Robots
-
[10]
John Brooke et al. 1996. SUS-A quick and dirty usability scale.Usability evaluation in industry189, 194 (1996), 4–7. Robo-Blocks: Generative Scaffolding in End-User Design and Programming of Social Robots DIS ’26, June 13–17, 2026, Singapore, Singapore
1996
-
[11]
Bruce G Buchanan and Reid G Smith. 1988. Fundamentals of expert systems. Annual review of computer science3, 1 (1988), 23–58
1988
-
[12]
Nina Buchina, Sherin Kamel, and Emilia Barakova. 2016. Design and evaluation of an end-user friendly tool for robot programming. In2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)(New York, NY, USA). IEEE Press, 185–191. https://doi.org/10.1109/ROMAN.2016. 7745109
-
[13]
Carroll and Judith Reitman Olson
John M. Carroll and Judith Reitman Olson. 1988. Chapter 2 - Mental Models in Human-Computer Interaction11This chapter appeared in its entirety and is reprinted from Mental Models in Human Computer Interaction: Research Issues about What the User of Software Knows, J.M. Carroll and J.R. Olson, Editors,-The report of the workshop on software human factors: ...
-
[14]
Juo-Tung Chen and Chien-Ming Huang. 2024. Forgetful Large Language Models: Lessons Learned from Using LLMs in Robot Programming.Proceedings of the AAAI Symposium Series2, 1 (Jan. 2024), 508–513. https://doi.org/10.1609/aaaiss. v2i1.27721
-
[15]
Aparajita Chowdhury, Aino Ahtinen, Roel Pieters, and Kaisa Vaananen. 2020. User Experience Goals for Designing Industrial Human-Cobot Collaboration: A Case Study of Franka Panda Robot. InProceedings of the 11th Nordic Conference on Human-Computer Interaction: Shaping Experiences, Shaping Society(Tallinn, Estonia)(NordiCHI ’20). Association for Computing M...
-
[16]
Victoria Clarke and Virginia Braun. 2017. Thematic analysis.The Journal of Positive Psychology12, 3 (2017), 297–298. https://doi.org/10.1080/17439760.2016. 1262613
-
[17]
Sarah Fakhoury, Aaditya Naik, Georgios Sakkas, Saikat Chakraborty, and Shuvendu K. Lahiri. 2024. LLM-Based Test-Driven Interactive Code Generation: User Study and Empirical Evaluation.IEEE Transactions on Software Engineering 50, 9 (2024), 2254–2268. https://doi.org/10.1109/TSE.2024.3428972
-
[18]
Terrence Fong, Illah Nourbakhsh, and Kerstin Dautenhahn. 2003. A survey of socially interactive robots.Robotics and Autonomous Systems42, 3 (2003), 143–166. https://doi.org/10.1016/S0921-8890(02)00372-X Socially Interactive Robots
-
[19]
Neil Fraser. 2015. Ten things we’ve learned from Blockly. InProceedings of the 2015 IEEE Blocks and Beyond Workshop (Blocks and Beyond) (BLOCKS AND BEYOND ’15). IEEE Computer Society, USA, 49–50. https://doi.org/10.1109/BLOCKS.2015. 7369000
-
[20]
Zichao Hu, Francesca Lucchetti, Claire Schlesinger, Yash Saxena, Anders Freeman, Sadanand Modak, Arjun Guha, and Joydeep Biswas. 2024. Deploying and Evaluating LLMs to Program Service Mobile Robots.IEEE Robotics and Automation Letters9, 3 (2024), 2853–2860. https://doi.org/10.1109/LRA.2024. 3360020
-
[21]
Justin Huang and Maya Cakmak. 2017. Code3: A System for End-to-End Programming of Mobile Manipulator Robots for Novices and Experts. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction(Vienna, Austria)(HRI ’17). Association for Computing Machinery, New York, NY, USA, 453–462. https://doi.org/10.1145/2909824.3020215
-
[22]
Justin Huang, Tessa Lau, and Maya Cakmak. 2016. Design and Evaluation of a Rapid Programming System for Service Robots. InThe Eleventh ACM/IEEE International Conference on Human Robot Interaction(Christchurch, New Zealand) (HRI ’16). IEEE Press, 295–302
2016
- [23]
-
[24]
Yohan Hwang and Jang Ho Lee. 2025. Exploring students’ experiences and perceptions of human-AI collaboration in digital content making.International Journal of Educational Technology in Higher Education22 (07 2025). https: //doi.org/10.1186/s41239-025-00542-0
-
[25]
Bryce Ikeda and Daniel Szafir. 2024. PRogramAR: Augmented Reality End-User Robot Programming.J. Hum.-Robot Interact.13, 1, Article 15 (March 2024), 20 pages. https://doi.org/10.1145/3640008
-
[26]
Durgaprasad Janjanam, Bharathi Ganesh, and L Manjunatha. 2021. Design of an expert system architecture: An overview.Journal of Physics: Conference Series 1767, 1 (feb 2021), 012036. https://doi.org/10.1088/1742-6596/1767/1/012036
- [27]
-
[28]
Michal Kapinus, Vítězslav Beran, Zdeněk Materna, and Daniel Bambušek. 2019. Spatially Situated End-User Robot Programming in Augmented Reality. In2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)(New Delhi, India). IEEE Press, 1–8. https://doi.org/10.1109/RO- MAN46459.2019.8956336
work page doi:10.1109/ro- 2019
-
[29]
Ulas Berk Karli, Juo-Tung Chen, Victor Nikhil Antony, and Chien-Ming Huang
-
[30]
Alchemist: LLM-Aided End-User Development of Robot Applications. InProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction(Boulder, CO, USA)(HRI ’24). Association for Computing Machinery, New York, NY, USA, 361–370. https://doi.org/10.1145/3610977.3634969
-
[31]
Majeed Kazemitabaar, Xinying Hou, Austin Henley, Barbara Jane Ericson, David Weintrop, and Tovi Grossman. 2024. How Novices Use LLM-based Code Generators to Solve CS1 Coding Tasks in a Self-Paced Learning Environment. InProceedings of the 23rd Koli Calling International Conference on Computing Education Research(Koli, Finland)(Koli Calling ’23). Associati...
-
[32]
Majeed Kazemitabaar, Runlong Ye, Xiaoning Wang, Austin Zachary Henley, Paul Denny, Michelle Craig, and Tovi Grossman. 2024. CodeAid: Evaluating a Classroom Deployment of an LLM-based Programming Assistant that Balances Student and Educator Needs. InProceedings of the 2024 CHI Conference on Human Factors in Computing Systems(Honolulu, HI, USA)(CHI ’24). As...
-
[33]
Callie Y. Kim, Christine P. Lee, and Bilge Mutlu. 2024. Understanding Large- Language Model (LLM)-powered Human-Robot Interaction. InProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction(Boulder, CO, USA)(HRI ’24). Association for Computing Machinery, New York, NY, USA, 371–380. https://doi.org/10.1145/3610977.3634966
-
[34]
Kim, Nathan Thomas White, Evan He, Frederic Sala, and Bilge Mutlu
Callie Y. Kim, Nathan Thomas White, Evan He, Frederic Sala, and Bilge Mutlu
-
[35]
RoboCritics: Enabling Reliable End-to-End LLM Robot Programming through Expert-Informed Critics. InProceedings of the 21st ACM/IEEE Inter- national Conference on Human-Robot Interaction(Edinburgh, Scotland, UK) (HRI ’26). Association for Computing Machinery, New York, NY, USA, 914–923. https://doi.org/10.1145/3757279.3785550
-
[36]
Kheng Lee Koay, Dag Sverre Syrdal, Kerstin Dautenhahn, and Michael L. Walters. 2020. A narrative approach to human-robot interaction prototyping for companion robots.Paladyn, Journal of Behavioral Robotics11, 1 (2020), 66–85. https://doi.org/10.1515/PJBR-2020-0003
-
[37]
Amy Koike, Bengisu Cagiltay, and Bilge Mutlu. 2024. Tangible Scenography as a Holistic Design Method for Human-Robot Interaction. InProceedings of the 2024 ACM Designing Interactive Systems Conference(Copenhagen, Denmark) (DIS ’24). Association for Computing Machinery, New York, NY, USA, 459–475. https://doi.org/10.1145/3643834.3661530
-
[38]
Liang, Chenyang Yang, and Brad A
Jenny T. Liang, Chenyang Yang, and Brad A. Myers. 2023. A Large-Scale Survey on the Usability of AI Programming Assistants: Successes and Challenges. arXiv:2303.17125 [cs.SE] https://arxiv.org/abs/2303.17125
-
[39]
Jinfang Liu, Yi Zhang, Wei Li, Qiyun Wang, Pingxiu Niu, and Xue Zhang. 2026. Adaptive vs. planned metacognitive scaffolding for computational thinking: Evidence from generative AI-supported programming in elementary education. Computers & Education241 (2026), 105473. https://doi.org/10.1016/j.compedu. 2025.105473
-
[40]
Zhicheng Liu and John Stasko. 2010. Mental Models, Visual Reasoning and Interaction in Information Visualization: A Top-down Perspective.IEEE Transactions on Visualization and Computer Graphics16, 6 (2010), 999–1008. https://doi.org/10.1109/TVCG.2010.177
-
[41]
Arnold Lund. 2001. Measuring Usability with the USE Questionnaire.Usability and User Experience Newsletter of the STC Usability SIG8 (01 2001)
2001
-
[42]
Michal Luria, Marius Hoggenmüller, Wen-Ying Lee, Luke Hespanhol, Malte Jung, and Jodi Forlizzi. 2021. Research through Design Approaches in Human-Robot Interaction. InCompanion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction(Boulder, CO, USA)(HRI ’21 Companion). Association for Computing Machinery, New York, NY, USA, 685–687. http...
-
[43]
Boxuan Ma, Huiyong Li, Gen Li, Li Chen, Cheng Tang, Yinjie Xie, Chenghao Gu, Atsushi Shimada, and Shin’ichi Konomi. 2025. Scaffolding Metacognition in Programming Education: Understanding Student-AI Interactions and Design Implications. arXiv:2511.04144 [cs.HC] https://arxiv.org/abs/2511.04144
-
[44]
Shuai Ma, Junling Wang, Yuanhao Zhang, Xiaojuan Ma, and April Yi Wang. 2025. DBox: Scaffolding Algorithmic Programming Learning through Learner-LLM Co-Decomposition. InProceedings of the 2025 CHI Conference on Human Factors in Computing Systems (CHI ’25). Association for Computing Machinery, New York, NY, USA, Article 585, 20 pages. https://doi.org/10.114...
-
[45]
Karthik Mahadevan, Jonathan Chien, Noah Brown, Zhuo Xu, Carolina Parada, Fei Xia, Andy Zeng, Leila Takayama, and Dorsa Sadigh. 2024. Generative Expressive Robot Behaviors using Large Language Models. InProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction(Boulder, CO, USA)(HRI ’24). Association for Computing Machinery, New Y...
-
[46]
Karthik Mahadevan, Blaine Lewis, Jiannan Li, Bilge Mutlu, Anthony Tang, and Tovi Grossman. 2025. ImageInThat: Manipulating Images to Convey User Instructions to Robots. In2025 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI). 757–766. https://doi.org/10.1109/HRI61500.2025. DIS ’26, June 13–17, 2026, Singapore, Singapore Sato et al. 10974179
-
[47]
Linda H. Mason, Karen R. Harris, and Steve Graham. 2002. Every Child Has a Story to Tell: Self-Regulated Strategy Development for Story Writing.Education and Treatment of Children25, 4 (2002), 496–506. http://www.jstor.org/stable/42899724
-
[48]
Christoph Mayr-Dorn, Mario Winterer, Christian Salomon, Doris Hohensinger, and Rudolf Ramler. 2021. Considerations for using Block-Based Languages for Industrial Robot Programming - a Case Study. In2021 IEEE/ACM 3rd International Workshop on Robotics Software Engineering (RoSE). IEEE, 5–12. https://doi.org/ 10.1109/RoSE52553.2021.00008
-
[49]
Roger McDermott, Gordon Eccleston, and Garry Brindley. 2008. More than a good story — can you really teach programming through story- telling?Innovation in Teaching and Learning in Information and Computer Sciences7, 1 (2008), 34–43. https://doi.org/10.11120/ital.2008.07010034 arXiv:https://doi.org/10.11120/ital.2008.07010034
-
[50]
Monika Mladenović, Ivica Boljat, and Žana Žanko. 2018. Comparing loops misconceptions in block-based and text-based programming languages at the K-12 level.Education and Information Technologies23 (2018), 1483–1500. https: //doi.org/10.1007/s10639-017-9673-3
-
[51]
Github copilot AI pair programmer: Asset or liability? J
Arghavan Moradi Dakhel, Vahid Majdinasab, Amin Nikanjam, Foutse Khomh, Michel C. Desmarais, and Zhen Ming (Jack) Jiang. 2023. GitHub Copilot AI pair programmer: Asset or Liability?Journal of Systems and Software203 (2023), 111734. https://doi.org/10.1016/j.jss.2023.111734
-
[52]
Sílvia Moros, Luke Wood, Ben Robins, Kerstin Dautenhahn, and Álvaro Castro-González. 2020. Programming a Humanoid Robot with the Scratch Language. InRobotics in Education, Munir Merdan, Wilfried Lepuschitz, Gottfried Koppensteiner, Richard Balogh, and David Obdržálek (Eds.). Springer International Publishing, Cham, 222–233. https://doi.org/10.1007/978-3-0...
-
[53]
Daye Nam, Andrew Macvean, Vincent Hellendoorn, Bogdan Vasilescu, and Brad Myers. 2024. Using an LLM to Help With Code Understanding. InProceedings of the IEEE/ACM 46th International Conference on Software Engineering(Lisbon, Portugal)(ICSE ’24). Association for Computing Machinery, New York, NY, USA, Article 97, 13 pages. https://doi.org/10.1145/3597503.3639187
-
[54]
Akhil Padmanabha, Jessie Yuan, Janavi Gupta, Zulekha Karachiwalla, Carmel Majidi, Henny Admoni, and Zackory Erickson. 2024. VoicePilot: Harnessing LLMs as Speech Interfaces for Physically Assistive Robots. InProceedings of the 37th Annual ACM Symposium on User Interface Software and Technology(Pittsburgh, PA, USA)(UIST ’24). Association for Computing Mach...
-
[55]
Jennifer Parham-Mocello and Martin Erwig. 2020. Does Story Programming Prepare for Coding?. InProceedings of the 51st ACM Technical Symposium on Computer Science Education(Portland, OR, USA)(SIGCSE ’20). Association for Computing Machinery, New York, NY, USA, 100–106. https://doi.org/10.1145/ 3328778.3366861
-
[56]
David Porfirio, Evan Fisher, Allison Sauppé, Aws Albarghouthi, and Bilge Mutlu
-
[57]
Bodystorming Human-Robot Interactions. InProceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology(New Orleans, LA, USA)(UIST ’19). Association for Computing Machinery, New York, NY, USA, 479–491. https://doi.org/10.1145/3332165.3347957
-
[58]
Porfirio, Laura Stegner, Maya Cakmak, Allison Sauppé, Aws Albargh- outhi, and Bilge Mutlu
David J. Porfirio, Laura Stegner, Maya Cakmak, Allison Sauppé, Aws Albargh- outhi, and Bilge Mutlu. 2021. Figaro: A Tabletop Authoring Environment for Human-Robot Interaction. InProceedings of the 2021 CHI Conference on Human Factors in Computing Systems(Yokohama, Japan)(CHI ’21). Association for Computing Machinery, New York, NY, USA, Article 414, 15 pag...
-
[59]
E. Pot, J. Monceaux, R. Gelin, and B. Maisonnier. 2009. Choregraphe: a graphical tool for humanoid robot programming. InRO-MAN 2009 - The 18th IEEE International Symposium on Robot and Human Interactive Communication. IEEE, 46–51. https://doi.org/10.1109/ROMAN.2009.5326209
-
[60]
Muhammet Ramoğlu, Çağlar Genç, and Kerem Rızvanoğlu. 2017. Programming a Robotic Toy with a Block Coding Application: A Usability Study with Non-programmer Adults. InDesign, User Experience, and Usability: Theory, Methodology, and Management, Aaron Marcus and Wentao Wang (Eds.). Springer International Publishing, Cham, 652–666
2017
-
[61]
Mitchel Resnick, John Maloney, Andrés Monroy-Hernández, Natalie Rusk, Evelyn Eastmond, Karen Brennan, Amon Millner, Eric Rosenbaum, Jay Silver, Brian Silverman, and Yasmin Kafai. 2009. Scratch: programming for all.Commun. ACM 52, 11 (Nov. 2009), 60–67. https://doi.org/10.1145/1592761.1592779
-
[62]
Kristin Y. Rozier. 2011. Linear Temporal Logic Symbolic Model Checking. Computer Science Review5, 2 (2011), 163–203. https://doi.org/10.1016/j.cosrev. 2010.06.002
-
[63]
Kimiko Ryokai, Michael Jongseon Lee, and Jonathan Micah Breitbart. 2009. Children’s storytelling and programming with robotic characters. InProceedings of the Seventh ACM Conference on Creativity and Cognition(Berkeley, California, USA)(C&C ’09). Association for Computing Machinery, New York, NY, USA, 19–28. https://doi.org/10.1145/1640233.1640240
-
[64]
David Adrian Sanders, Alexander Gegov, and David Ndzi. 2018. Knowledge-Based Expert System Using a Set of Rules to Assist a Tele-operated Mobile Robot. In Intelligent Systems and Applications, Yaxin Bi, Supriya Kapoor, and Rahul Bhatia (Eds.). Springer International Publishing, Cham, 371–392
2018
-
[65]
Mike Scaife and Yvonne Rogers. 1996. External cognition: how do graphical representations work?International Journal of Human-Computer Studies45, 2 (1996), 185–213. https://doi.org/10.1006/ijhc.1996.0048
- [66]
-
[67]
Andrew Schoen, Curt Henrichs, Mathias Strohkirch, and Bilge Mutlu. 2020. Authr: A Task Authoring Environment for Human-Robot Teams. InProceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology(Virtual Event, USA)(UIST ’20). Association for Computing Machinery, New York, NY, USA, 1194–1208. https://doi.org/10.1145/3379337.3415872
-
[68]
Andrew Schoen and Bilge Mutlu. 2024. OpenVP: A Customizable Visual Programming Environment for Robotics Applications. InProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction(Boulder, CO, USA)(HRI ’24). Association for Computing Machinery, New York, NY, USA, 944–948. https://doi.org/10.1145/3610977.3637477
-
[69]
Andrew Schoen, Nathan White, Curt Henrichs, Amanda Siebert-Evenstone, David Shaffer, and Bilge Mutlu. 2022. CoFrame: A System for Training Novice Cobot Programmers. In2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI). IEEE Press, 185–194. https://doi.org/10.1109/HRI53351.2022. 9889345
-
[70]
Preciado Vanegas, and Kim Baraka
Nienke Schrage-Prent, Daniel F. Preciado Vanegas, and Kim Baraka. 2024. Interactive Robot Programming Inspired by Dog Training: An Exploratory Study. InCompanion Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction(Boulder, CO, USA)(HRI Companion ’24). Association for Computing Machinery, New York, NY, USA, 965–969. https:/...
-
[71]
Sefidgar, Thomas Weng, Heather Harvey, Sarah Elliott, and Maya Cakmak
Yasaman S. Sefidgar, Thomas Weng, Heather Harvey, Sarah Elliott, and Maya Cakmak. 2018. RobotIST: Interactive Situated Tangible Robot Programming. InProceedings of the 2018 ACM Symposium on Spatial User Interaction(Berlin, Germany)(SUI ’18). Association for Computing Machinery, New York, NY, USA, 141–149. https://doi.org/10.1145/3267782.3267921
- [72]
-
[73]
Vemprala, Rogerio Bonatti, Arthur Bucker, and Ashish Kapoor
Sai H. Vemprala, Rogerio Bonatti, Arthur Bucker, and Ashish Kapoor. 2024. ChatGPT for Robotics: Design Principles and Model Abilities.IEEE Access12 (2024), 55682–55696. https://doi.org/10.1109/ACCESS.2024.3387941
-
[74]
David Weintrop, Afsoon Afzal, Jean Salac, Patrick Francis, Boyang Li, David C. Shepherd, and Diana Franklin. 2018. Evaluating CoBlox: A Comparative Study of Robotics Programming Environments for Adult Novices. InProceedings of the 2018 CHI Conference on Human Factors in Computing Systems(Montreal QC, Canada)(CHI ’18). Association for Computing Machinery, ...
-
[75]
Shepherd, Patrick Francis, and Diana Franklin
David Weintrop, David C. Shepherd, Patrick Francis, and Diana Franklin. 2017. Blockly goes to work: Block-based programming for industrial robots. In2017 IEEE Blocks and Beyond Workshop (B&B). 29–36. https://doi.org/10.1109/BLOCKS. 2017.8120406
-
[76]
David Weintrop and Uri Wilensky. 2015. To block or not to block, that is the question: students’ perceptions of blocks-based programming. InProceedings of the 14th International Conference on Interaction Design and Children(Boston, Massachusetts)(IDC ’15). Association for Computing Machinery, New York, NY, USA, 199–208. https://doi.org/10.1145/2771839.2771860
-
[77]
David Weintrop and Uri Wilensky. 2017. Comparing Block-Based and Text-Based Programming in High School Computer Science Classrooms.ACM Trans. Comput. Educ.18, 1, Article 3 (Oct. 2017), 25 pages. https://doi.org/10.1145/3089799
-
[78]
Michel Wermelinger. 2023. Using GitHub Copilot to Solve Simple Programming Problems. InProceedings of the 54th ACM Technical Symposium on Computer Science Education V. 1(Toronto ON, Canada)(SIGCSE 2023). Association for Computing Machinery, New York, NY, USA, 172–178. https://doi.org/10.1145/ 3545945.3569830
-
[79]
RH20T: A comprehensive robotic dataset for learning diverse skills in one-shot
Ziyi Yang, Shreyas S. Raman, Ankit Shah, and Stefanie Tellex. 2024. Plug in the Safety Chip: Enforcing Constraints for LLM-driven Robot Agents. In2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 14435–14442. https://doi.org/10.1109/ICRA57147.2024.10611447
-
[80]
Ryan Yen, Jiawen Stefanie Zhu, Sangho Suh, Haijun Xia, and Jian Zhao. 2024. CoLadder: Manipulating Code Generation via Multi-Level Blocks. InProceedings of the 37th Annual ACM Symposium on User Interface Software and Technology (Pittsburgh, PA, USA)(UIST ’24). Association for Computing Machinery, New York, NY, USA, Article 11, 20 pages. https://doi.org/10...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.