Inverse Manipulation through Symbolic Planning and Residual Operator Learning
Pith reviewed 2026-06-28 06:16 UTC · model grok-4.3
The pith
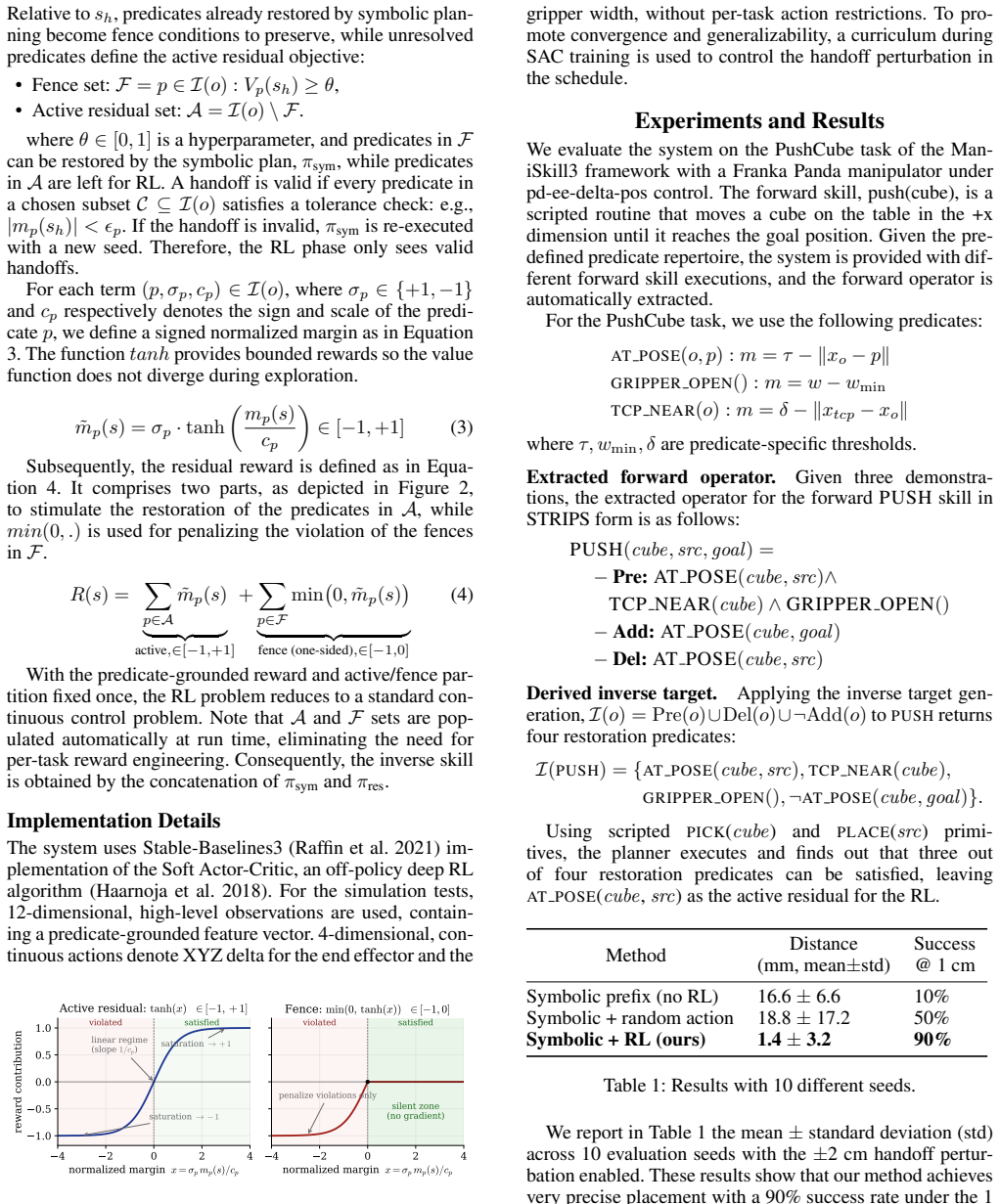
Predicate-derived residual reinforcement learning turns approximate symbolic inverse plans into accurate robotic manipulation inverses.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
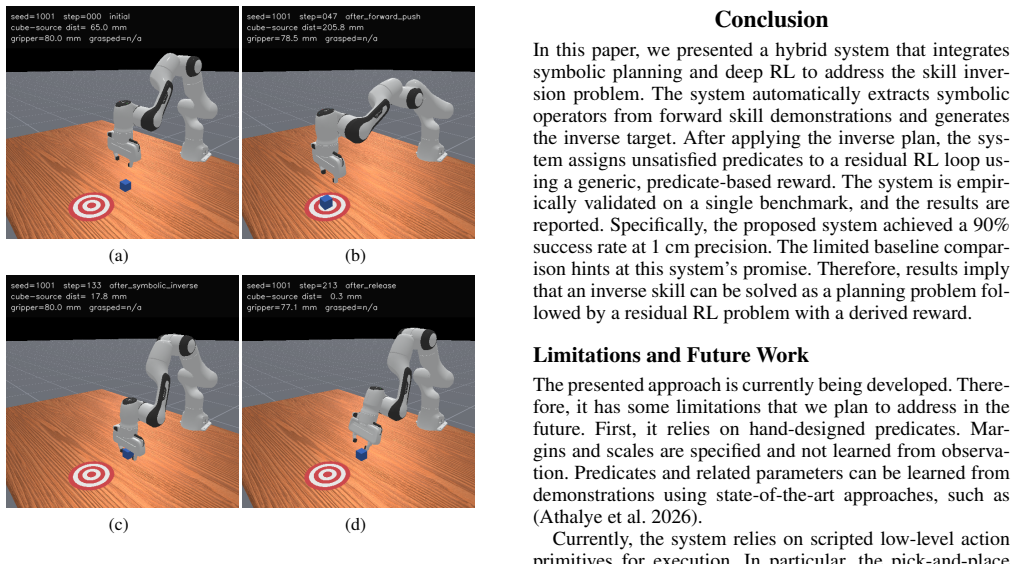
For each extracted operator an inverse restoration objective is defined that preserves preconditions, restores delete effects, and negates add effects. A task planner attempts to satisfy the objective with action primitives; unresolved predicates then induce a residual operator learning problem solved through reinforcement learning. On the ManiSkill3 PushCube task the symbolic inverse produces a coarse pick-and-place restoration while a Soft Actor-Critic policy refines the cube pose to meet the remaining predicates, demonstrating that predicate-derived residual control can convert an approximate symbolic inverse into a physically grounded inverse skill.
What carries the argument
The residual operator learning problem induced by unresolved symbolic predicates after symbolic planning, solved via reinforcement learning to refine the inverse skill.
If this is right
- Symbolic planning can produce coarse but structurally valid inverse plans that residual policies then complete.
- Residual reinforcement learning can be scoped to specific unsatisfied predicates rather than the full task.
- The same extracted operators support both forward execution and inverse restoration without modification.
- Hybrid symbolic-plus-residual methods can address continuous interaction dynamics that pure symbolic inversion cannot handle.
Where Pith is reading between the lines
- The method may generalize to tasks where symbolic abstractions exist but exact inverse dynamics are unknown.
- If residual policies remain local to each operator, the approach could support longer-horizon inverse planning without exponential growth in learning complexity.
- A natural extension would be to measure how much the residual component reduces the number of symbolic planning failures across varied initial states.
Load-bearing premise
Reinforcement learning can resolve any remaining predicates without invalidating the overall symbolic plan or requiring changes to the extracted operators.
What would settle it
A test run in which the trained residual policy consistently fails to satisfy the unresolved inverse predicates on held-out executions of the pushing task.
Figures

read the original abstract
Inverting a robotic task requires more than reversing symbolic state transitions or rewinding motor trajectories. In robot manipulation tasks, symbolic inverse plans often fail to fully restore the effects of forward executions under continuous interaction dynamics. We present a hybrid framework for inverse manipulation that derives inverse-skill objectives from STRIPS-like operators automatically extracted from demonstrations through soft geometric predicates. For each extracted operator, we construct an inverse restoration objective that preserves preconditions, restores delete effects, and negates add effects. A task planner first attempts to satisfy this objective using available action primitives. Unresolved symbolic predicates then induce a residual operator learning problem solved through Reinforcement Learning (RL). We evaluate the framework on the ManiSkill3 PushCube task. For a forward pushing skill, the symbolic inverse performs a coarse pick-and-place restoration, while a residual Soft Actor-Critic policy refines the cube pose to satisfy the remaining inverse predicates. Our results show that predicate-derived residual control can turn an approximate symbolic inverse into a physically grounded inverse skill.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a hybrid framework for inverse robotic manipulation. It automatically extracts STRIPS-like operators from demonstrations via soft geometric predicates, derives inverse restoration objectives that preserve preconditions and negate add/delete effects, applies a task planner to attempt symbolic inversion, and formulates unresolved predicates as a residual operator learning problem solved by RL (Soft Actor-Critic). On the ManiSkill3 PushCube task, the symbolic inverse yields a coarse pick-and-place restoration while the residual policy refines cube pose to satisfy remaining inverse predicates, demonstrating that predicate-derived residual control can produce a physically grounded inverse skill.
Significance. If the central claim holds, the framework provides a structured method to derive inverse skills from forward demonstrations by using symbolic predicates to define a residual learning objective, potentially improving sample efficiency and interpretability over pure RL or pure symbolic approaches. The automatic extraction of operators and the inverse restoration objective are strengths that ground the learning problem in the symbolic plan without requiring manual redesign of operators.
major comments (1)
- [Evaluation] Evaluation section: the results on ManiSkill3 PushCube are described only at a high level (coarse pick-and-place plus residual refinement) with no reported quantitative metrics such as success rate, final pose error, predicate satisfaction rate, or comparisons to baselines (pure symbolic planner, pure SAC, or alternative residual formulations). This absence is load-bearing for the claim that 'predicate-derived residual control can turn an approximate symbolic inverse into a physically grounded inverse skill.'
minor comments (1)
- [Abstract] Abstract: the description of the inverse restoration objective could explicitly reference the three components (preserve preconditions, restore delete effects, negate add effects) to improve clarity for readers unfamiliar with the framework.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for major revision. We agree that the evaluation requires quantitative metrics and baseline comparisons to substantiate the central claims, and we will revise the manuscript to address this.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section: the results on ManiSkill3 PushCube are described only at a high level (coarse pick-and-place plus residual refinement) with no reported quantitative metrics such as success rate, final pose error, predicate satisfaction rate, or comparisons to baselines (pure symbolic planner, pure SAC, or alternative residual formulations). This absence is load-bearing for the claim that 'predicate-derived residual control can turn an approximate symbolic inverse into a physically grounded inverse skill.'
Authors: We acknowledge that the evaluation in the current manuscript is presented at a high level without quantitative metrics or baseline comparisons. This is a valid concern that weakens support for the claim. In the revised version, we will expand the evaluation section with new experiments reporting success rates, final pose errors, predicate satisfaction rates, and comparisons to baselines including pure symbolic planning, pure SAC, and alternative residual formulations. These results will be added to demonstrate the effectiveness of the predicate-derived residual control. revision: yes
Circularity Check
No significant circularity
full rationale
The paper describes a hybrid symbolic-RL framework for inverse manipulation: STRIPS-like operators are extracted from demonstrations via soft predicates, inverse restoration objectives are constructed from those operators' add/delete effects, a planner is applied, and RL resolves remaining predicates. No equations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text that would make any claimed result equivalent to its inputs by construction. The central claim (predicate-derived residual control produces a grounded inverse skill) is supported by the described mechanism and task evaluation rather than reducing to a definitional loop or prior self-work.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Artificial intelligence , volume=
STRIPS: A new approach to the application of theorem proving to problem solving , author=. Artificial intelligence , volume=. 1971 , publisher=
1971
-
[2]
7th Robot Learning Workshop: Towards Robots with Human-Level Abilities , year=
Maniskill3: Gpu parallelized robot simulation and rendering for generalizable embodied ai , author=. 7th Robot Learning Workshop: Towards Robots with Human-Level Abilities , year=
-
[3]
International Conference on Learning Representations , year=
Leave no Trace: Learning to Reset for Safe and Autonomous Reinforcement Learning , author=. International Conference on Learning Representations , year=
-
[4]
Advances in Neural Information Processing Systems , volume=
There is no turning back: A self-supervised approach for reversibility-aware reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[5]
2010 , publisher=
Artificial intelligence a modern approach , author=. 2010 , publisher=
2010
-
[6]
6th Annual Conference on Robot Learning , year=
Learning Neuro-Symbolic Skills for Bilevel Planning , author=. 6th Annual Conference on Robot Learning , year=
-
[7]
Annual Review of Control, Robotics, and Autonomous Systems , volume=
Toward robotic manipulation , author=. Annual Review of Control, Robotics, and Autonomous Systems , volume=. 2018 , publisher=
2018
-
[8]
2020 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Trass: Time reversal as self-supervision , author=. 2020 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2020 , organization=
2020
-
[9]
Proceedings, 1989 International Conference on Robotics and Automation , pages=
Automated assembly in a CSG domain , author=. Proceedings, 1989 International Conference on Robotics and Automation , pages=. 1989 , organization=
1989
-
[10]
ACM Transactions on Graphics (TOG) , volume=
Assemble them all: Physics-based planning for generalizable assembly by disassembly , author=. ACM Transactions on Graphics (TOG) , volume=. 2022 , publisher=
2022
-
[11]
PRL Workshop Series - Bridging the Gap Between AI Planning and Reinforcement Learning , year=
Using reverse reinforcement learning for assembly tasks , author=. PRL Workshop Series - Bridging the Gap Between AI Planning and Reinforcement Learning , year=
-
[12]
Forward-Backward Reinforcement Learning
Forward-backward reinforcement learning , author=. arXiv preprint arXiv:1803.10227 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[13]
Journal of Artificial Intelligence Research , volume=
From skills to symbols: Learning symbolic representations for abstract high-level planning , author=. Journal of Artificial Intelligence Research , volume=
-
[14]
The Knowledge Engineering Review , volume=
Acquiring planning domain models using LOCM , author=. The Knowledge Engineering Review , volume=. 2013 , publisher=
2013
-
[15]
Artificial Intelligence , volume=
Learning action models with minimal observability , author=. Artificial Intelligence , volume=. 2019 , publisher=
2019
-
[16]
Icml , volume=
Policy invariance under reward transformations: Theory and application to reward shaping , author=. Icml , volume=. 1999 , organization=
1999
-
[17]
Journal of Artificial Intelligence Research , volume=
Reward machines: Exploiting reward function structure in reinforcement learning , author=. Journal of Artificial Intelligence Research , volume=
-
[18]
, author=
LTL and beyond: Formal languages for reward function specification in reinforcement learning. , author=. IJCAI , volume=
-
[19]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Restraining bolts for reinforcement learning agents , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[20]
Proceedings of IJCAI-07 , year =
Thomas Eiter and Esra Erdem and Wolfgang Faber , title =. Proceedings of IJCAI-07 , year =
-
[21]
Journal of Applied Logic , volume =
Thomas Eiter and Esra Erdem and Wolfgang Faber , title =. Journal of Applied Logic , volume =
-
[22]
On the Reversibility of Actions in Planning , booktitle =
Michael Morak and Luk. On the Reversibility of Actions in Planning , booktitle =. 2020 , pages =
2020
-
[23]
Universal and Uniform Action Reversibility , booktitle =
Luk. Universal and Uniform Action Reversibility , booktitle =. 2021 , pages =
2021
-
[24]
International conference on machine learning , pages=
Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor , author=. International conference on machine learning , pages=. 2018 , organization=
2018
-
[25]
Journal of machine learning research , volume=
Stable-baselines3: Reliable reinforcement learning implementations , author=. Journal of machine learning research , volume=
-
[26]
IEEE Robotics and Automation Letters , year=
From Pixels to Predicates: Learning Symbolic World Models via Pretrained VLMs , author=. IEEE Robotics and Automation Letters , year=
-
[27]
IEEE Robotics and Automation Letters , volume=
Conditional neural expert processes for learning movement primitives from demonstration , author=. IEEE Robotics and Automation Letters , volume=. 2024 , publisher=
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.