Meridian: Metric-Semantic Primitive Matching for Cross-View Geo-Localization Beyond Urban Environments
Pith reviewed 2026-06-28 00:48 UTC · model grok-4.3
The pith
Meridian matches metric-semantic primitives between aerial imagery and ground RGB-D data to localize robots globally without environment-specific training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that matching metric-semantic primitives across aerial and ground views, combined with consistency metrics for pose estimation and outlier rejection, allows accurate global localization of ground robots in diverse environments without any training or fine-tuning on area-specific data.
What carries the argument
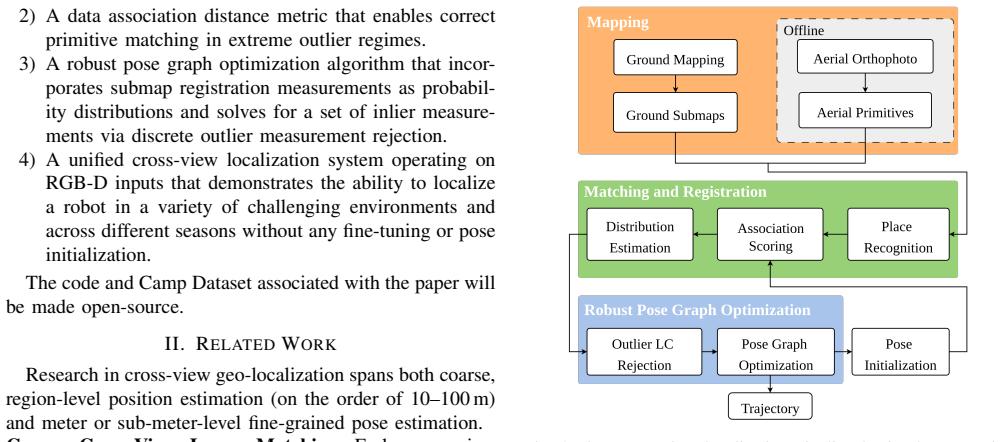
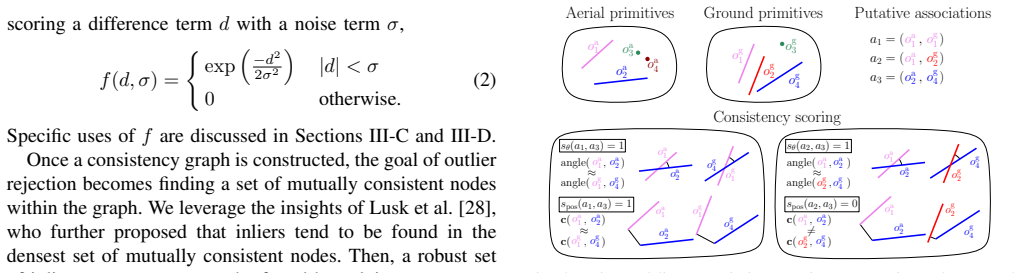
metric-semantic primitive matching using novel consistency metrics to estimate pose distributions and reject outliers within a pose graph optimization framework
If this is right
- Accurate localization supports repeatable robot tasks and safe operation in GNSS-denied outdoor areas.
- The approach handles repetitive geometries and featureless landscapes common in natural terrain.
- Generalization occurs across autonomous driving, park, campus, and wilderness environments without retraining.
- Trajectory estimation benefits from robust rejection of outlier hypotheses during optimization.
Where Pith is reading between the lines
- Extending the primitive matching to additional sensor modalities could broaden its use in multi-robot systems.
- Applying similar consistency checks might improve other cross-view localization techniques in challenging conditions.
- Long-term operation in changing environments could be tested by repeating traversals over time.
- This method suggests potential for fully training-free global localization in robotics.
Load-bearing premise
The consistency metrics reliably estimate distributions over submap poses and reject outliers in repetitive or featureless areas without area-specific training or fine-tuning.
What would settle it
Observing high trajectory errors or failure to localize in a previously unseen repetitive geometry or featureless landscape would indicate the metrics do not generalize as claimed.
Figures


read the original abstract
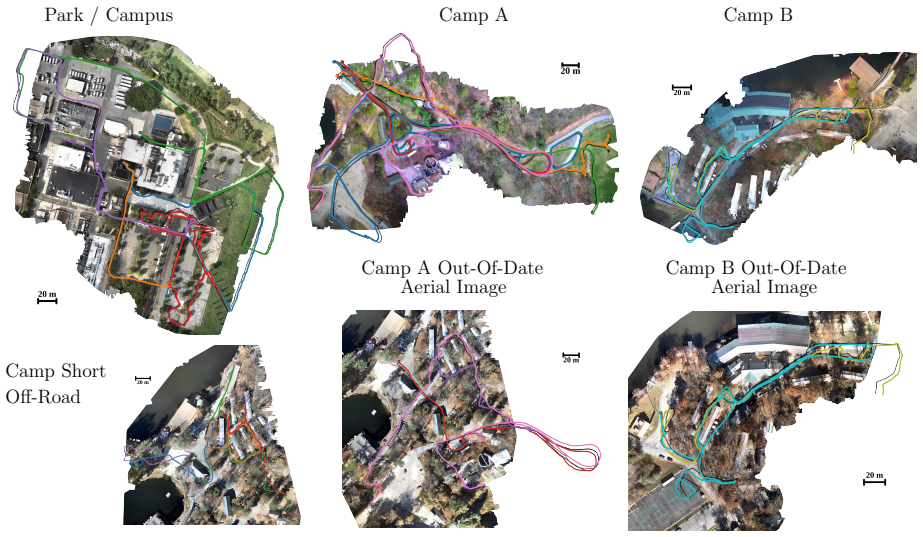
Successful robot automation requires accurate global localization to support repeatability, task planning, goal specification, and safe operation. However, reliable localization in GNSS-denied environments remains an open problem. Overhead aerial imagery offers a promising solution, but existing approaches primarily target structured urban environments and have been rarely demonstrated in unstructured natural terrain. Limitations of the state-of-the-art include a reliance on models trained for specific environments, as well as difficulty handling repetitive geometries and featureless landscapes commonly found in natural outdoor areas. To overcome these challenges, we present Meridian, a method for matching high-level metric-semantic primitives across aerial images and ground robot RGB-D camera data that achieves accurate global localization and generalizes well across diverse environments, all without any training or algorithmic fine-tuning on area-specific data. We formulate novel consistency metrics to estimate a distribution over robot submap poses and to reject outlier hypotheses in a robust pose graph optimization step for accurate robot trajectory estimation. We demonstrate that our algorithm can localize a ground robot across a wide variety of environments, including an autonomous driving dataset, a park and campus area, and a wilderness camp, with an average optimized trajectory error of 2.4 m over 19 km of ground traversal.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Meridian, a training-free approach to cross-view geo-localization that matches high-level metric-semantic primitives extracted from aerial imagery against ground-robot RGB-D submaps. Novel consistency metrics are introduced to produce a distribution over submap poses and to reject outliers inside a robust pose-graph optimization stage; the central empirical claim is an average optimized trajectory error of 2.4 m across 19 km of traversal spanning an autonomous-driving dataset, park/campus scenes, and a wilderness camp.
Significance. If the reported accuracy and zero-shot generalization hold, the work would meaningfully extend metric-semantic localization beyond the urban settings that dominate the literature, offering a practical route to reliable GNSS-denied operation in unstructured natural terrain.
major comments (2)
- [Abstract] Abstract (and §4 experiments): the headline 2.4 m / 19 km result across wilderness data is load-bearing on the claim that the consistency metrics can both produce a usable pose distribution and reject outliers when primitive density is low; no formulation of the metrics, ablation on their sensitivity to primitive sparsity, or per-environment rejection-rate breakdown is supplied to substantiate the no-training generalization.
- [Method] Method section (consistency-metric definitions): without the explicit equations or algorithmic description of how the metrics estimate pose distributions and perform outlier rejection, it remains unclear whether they implicitly require a minimum feature density that is routinely absent in repetitive or featureless wilderness geometry.
minor comments (2)
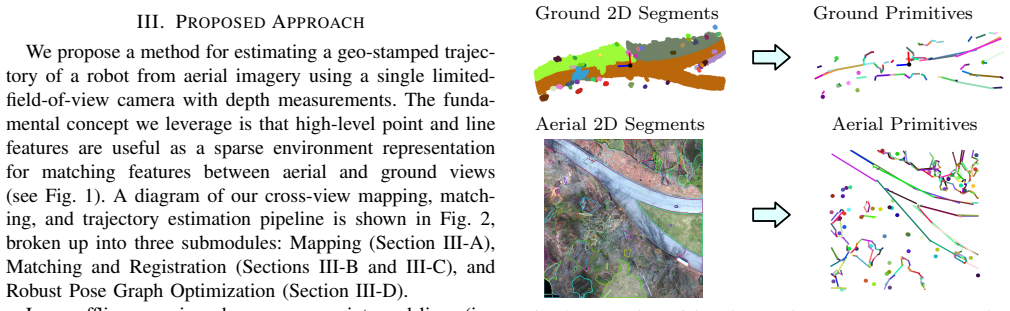
- The abstract would be clearer if it named the concrete primitive types (e.g., planes, lines, semantic classes) extracted from both aerial and ground data.
- Figure captions and axis labels in the experimental section should explicitly state whether the reported errors are before or after the final pose-graph optimization step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The two major comments highlight the need for greater clarity on the consistency metrics. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract (and §4 experiments): the headline 2.4 m / 19 km result across wilderness data is load-bearing on the claim that the consistency metrics can both produce a usable pose distribution and reject outliers when primitive density is low; no formulation of the metrics, ablation on their sensitivity to primitive sparsity, or per-environment rejection-rate breakdown is supplied to substantiate the no-training generalization.
Authors: We agree that the headline result relies on the metrics' ability to handle low-density primitives. The revised manuscript will include the full mathematical formulation of the consistency metrics in §3, an ablation study varying primitive density (including wilderness subsets), and a per-environment breakdown of outlier rejection rates. These additions will directly substantiate the zero-shot generalization claim. revision: yes
-
Referee: [Method] Method section (consistency-metric definitions): without the explicit equations or algorithmic description of how the metrics estimate pose distributions and perform outlier rejection, it remains unclear whether they implicitly require a minimum feature density that is routinely absent in repetitive or featureless wilderness geometry.
Authors: The current manuscript describes the metrics at a high level but lacks the requested explicit equations and pseudocode. We will expand §3 with the complete equations for pose-distribution estimation and the robust outlier-rejection procedure inside the pose-graph optimizer, plus a short analysis of behavior under sparse or repetitive geometry. This will clarify that the metrics do not presuppose a minimum feature density. revision: yes
Circularity Check
No significant circularity; derivation relies on novel metrics
full rationale
The abstract and description present Meridian as introducing new consistency metrics formulated to estimate pose distributions and reject outliers, with demonstrations across environments without training or fine-tuning. No equations, self-citations, or fitted parameters are shown that reduce the central claims (2.4 m error over 19 km) to inputs by construction. The method is self-contained against external benchmarks via cross-environment validation, consistent with the reader's assessment of score 2.0 but warranting 0 given absence of load-bearing reductions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Part1 prelude,
L. Carlone, A. Kim, T. Barfoot, D. Cremers, and F. Dellaert, “Part1 prelude,” inSLAM Handbook. From Localization and Mapping to Spatial Intelligence, L. Carlone, A. Kim, T. Barfoot, D. Cremers, and F. Dellaert, Eds. Cambridge University Press, 2026
2026
-
[2]
Satellite image-based localization via learned embeddings,
D.-K. Kim and M. R. Walter, “Satellite image-based localization via learned embeddings,” in2017 IEEE international conference on robotics and automation (ICRA). IEEE, 2017, pp. 2073–2080
2017
-
[3]
Satellite image based cross-view localization for autonomous vehicle,
S. Wang, Y . Zhang, A. V ora, A. Perincherry, and H. Li, “Satellite image based cross-view localization for autonomous vehicle,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 3592–3599
2023
-
[4]
Any way you look at it: Semantic crossview localization and mapping with lidar,
I. D. Miller, A. Cowley, R. Konkimalla, S. S. Shivakumar, T. Nguyen, T. Smith, C. J. Taylor, and V . Kumar, “Any way you look at it: Semantic crossview localization and mapping with lidar,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2397–2404, 2021
2021
-
[5]
Adaptive teams of autonomous aerial and ground robots for situational aware- ness,
M. A. Hsieh, A. Cowley, J. F. Keller, L. Chaimowicz, B. Grocholsky, V . Kumar, C. J. Taylor, Y . Endo, R. C. Arkin, B. Jung,et al., “Adaptive teams of autonomous aerial and ground robots for situational aware- ness,”Journal of field robotics, vol. 24, no. 11-12, pp. 991–1014, 2007
2007
-
[6]
Fgˆ 2: Fine-grained cross-view localization by fine-grained feature matching,
Z. Xia and A. Alahi, “Fgˆ 2: Fine-grained cross-view localization by fine-grained feature matching,” inProceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 6362–6372
2025
-
[7]
Increasing slam pose accuracy by ground-to-satellite image registration,
Y . Zhang, Y . Shi, S. Wang, A. V ora, A. Perincherry, Y . Chen, and H. Li, “Increasing slam pose accuracy by ground-to-satellite image registration,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 8522–8528
2024
-
[8]
View from above: Orthogonal-view aware cross- view localization,
S. Wang, C. Nguyen, J. Liu, Y . Zhang, S. Muthu, F. A. Maken, K. Zhang, and H. Li, “View from above: Orthogonal-view aware cross- view localization,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 14 843–14 852
2024
-
[9]
Beyond cross-view image retrieval: Highly accurate vehicle localization using satellite image,
Y . Shi and H. Li, “Beyond cross-view image retrieval: Highly accurate vehicle localization using satellite image,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2022
2022
-
[10]
X. Zhao, W. Ding, Y . An, Y . Du, T. Yu, M. Li, M. Tang, and J. Wang, “Fast segment anything,”arXiv preprint arXiv:2306.12156, 2023
-
[11]
Segment anything,
A. Kirillov, E. Mintun, N. Ravi, H. Mao, C. Rolland, L. Gustafson, T. Xiao, S. Whitehead, A. C. Berg, W.-Y . Lo,et al., “Segment anything,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 4015–4026
2023
-
[12]
DINOv2: Learning Robust Visual Features without Supervision
M. Oquab, T. Darcet, T. Moutakanni, H. V o, M. Szafraniec, V . Khali- dov, P. Fernandez, D. Haziza, F. Massa, A. El-Nouby,et al., “Dinov2: Learning robust visual features without supervision,”arXiv preprint arXiv:2304.07193, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[13]
Cross-view image geolocaliza- tion,
T.-Y . Lin, S. Belongie, and J. Hays, “Cross-view image geolocaliza- tion,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2013, pp. 891–898
2013
-
[14]
Cross- view geo-localization: a survey,
A. Durgam, S. Paheding, V . Dhiman, and V . Devabhaktuni, “Cross- view geo-localization: a survey,”IEEE Access, 2024
2024
-
[15]
Cvm-net: Cross-view matching network for image-based ground-to-aerial geo-localization,
S. Hu, M. Feng, R. M. Nguyen, and G. H. Lee, “Cvm-net: Cross-view matching network for image-based ground-to-aerial geo-localization,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018, pp. 7258–7267
2018
-
[16]
City-wide street-to-satellite image geolocalization of a mobile ground agent,
L. M. Downes, D.-K. Kim, T. J. Steiner, and J. P. How, “City-wide street-to-satellite image geolocalization of a mobile ground agent,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 11 102–11 108
2022
-
[17]
Revisiting cross-view localization from image matching,
P. Xia, Q. Wu, L. Yu, Y . Liu, M. Xiong, L. Liang, Y . Zhang, and Y . Wan, “Revisiting cross-view localization from image matching,” arXiv e-prints, pp. arXiv–2508, 2025
2025
-
[18]
Uncertainty-aware vision-based metric cross-view geolocal- ization,
F. Fervers, S. Bullinger, C. Bodensteiner, M. Arens, and R. Stiefel- hagen, “Uncertainty-aware vision-based metric cross-view geolocal- ization,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 21 621–21 631
2023
-
[19]
Geo-localization based on dynamically weighted factor- graph,
M. ´A. Mu ˜noz-Ba˜n´on, A. Olivas, E. Velasco-S ´anchez, F. A. Candelas, and F. Torres, “Geo-localization based on dynamically weighted factor- graph,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5599– 5606, 2024
2024
-
[20]
Global local- ization in unstructured environments using semantic object maps built from various viewpoints,
J. Ankenbauer, P. C. Lusk, A. Thomas, and J. P. How, “Global local- ization in unstructured environments using semantic object maps built from various viewpoints,” in2023 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2023, pp. 1358–1365
2023
-
[21]
Osm-slam: Aiding slam with openstreetmaps priors,
M. Frosi, V . Gobbi, and M. Matteucci, “Osm-slam: Aiding slam with openstreetmaps priors,”Frontiers in Robotics and AI, vol. 10, p. 1064934, 2023
2023
-
[22]
Global localization using openstreetmap and elevation offsets
A. Przewodowski, F. S. Os ´orio, and V . G. Junior, “Global localization using openstreetmap and elevation offsets.”J. Braz. Comput. Soc., vol. 30, no. 1, pp. 264–273, 2024
2024
-
[23]
Odometry- assisted lidar-openstreetmap matching method for vehicle global po- sitioning,
Z. Li, R. Zuo, Y . Wang, F. Ding, C. Wei, and M. Wu, “Odometry- assisted lidar-openstreetmap matching method for vehicle global po- sitioning,”IEEE Internet of Things Journal, 2026
2026
-
[24]
Autonomous vehicle localization without prior high-definition map,
S. Lee and J.-H. Ryu, “Autonomous vehicle localization without prior high-definition map,”IEEE Transactions on Robotics, vol. 40, pp. 2888–2906, 2024
2024
-
[25]
Fast global registration,
Q.-Y . Zhou, J. Park, and V . Koltun, “Fast global registration,” in European conference on computer vision. Springer, 2016, pp. 766– 782
2016
-
[26]
Teaser: Fast and certifiable point cloud registration,
H. Yang, J. Shi, and L. Carlone, “Teaser: Fast and certifiable point cloud registration,”IEEE Transactions on Robotics, vol. 37, no. 2, pp. 314–333, 2020
2020
-
[27]
Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography,
M. A. Fischler and R. C. Bolles, “Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography,”Communications of the ACM, vol. 24, no. 6, pp. 381–395, 1981
1981
-
[28]
CLIPPER: Robust Data Association without an Initial Guess,
P. C. Lusk and J. P. How, “CLIPPER: Robust Data Association without an Initial Guess,”IEEE Robotics and Automation Letters, 2024
2024
-
[29]
Incremental-segment-based localization in 3-d point clouds,
R. Dub ´e, M. G. Gollub, H. Sommer, I. Gilitschenski, R. Siegwart, C. Cadena, and J. Nieto, “Incremental-segment-based localization in 3-d point clouds,”IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1832–1839, 2018
2018
-
[30]
ROMAN: Open-Set Object Map Alignment for Robust View- Invariant Global Localization,
M. B. Peterson, Y . X. Jia, Y . Tian, A. Thomas, and J. P. How, “ROMAN: Open-Set Object Map Alignment for Robust View- Invariant Global Localization,” inRobotics: Science and Systems (RSS), 2025
2025
-
[31]
GraffMatch: Global matching of 3d lines and planes for wide baseline lidar registration,
P. C. Lusk, D. Parikh, and J. P. How, “GraffMatch: Global matching of 3d lines and planes for wide baseline lidar registration,”IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 632–639, 2022
2022
-
[32]
Slim: Scalable and lightweight lidar mapping in urban environments,
Z. Yu, Z. Qiao, W. Liu, H. Yin, and S. Shen, “Slim: Scalable and lightweight lidar mapping in urban environments,”IEEE Transactions on Robotics, 2025
2025
-
[33]
Distribution estimation for global data association via approximate bayesian infer- ence,
Y . Jia, M. B. Peterson, Q. Li, Y . Tian, and J. P. How, “Distribution estimation for global data association via approximate bayesian infer- ence,”arXiv preprint arXiv:2509.15565, 2025
-
[34]
AnyLoc: Towards universal visual place recognition,
N. Keetha, A. Mishra, J. Karhade, K. M. Jatavallabhula, S. Scherer, M. Krishna, and S. Garg, “AnyLoc: Towards universal visual place recognition,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1286–1293, 2023
2023
-
[35]
Least-squares fitting of two 3-d point sets,
K. S. Arun, T. S. Huang, and S. D. Blostein, “Least-squares fitting of two 3-d point sets,”IEEE Transactions on pattern analysis and machine intelligence, no. 5, pp. 698–700, 1987
1987
-
[36]
Pair- wise consistent measurement set maximization for robust multi-robot map merging,
J. G. Mangelson, D. Dominic, R. M. Eustice, and R. Vasudevan, “Pair- wise consistent measurement set maximization for robust multi-robot map merging,” in2018 IEEE international conference on robotics and automation (ICRA). IEEE, 2018, pp. 2916–2923
2018
-
[37]
Kimera-multi: Robust, distributed, dense metric-semantic slam for multi-robot systems,
Y . Tian, Y . Chang, F. H. Arias, C. Nieto-Granda, J. P. How, and L. Carlone, “Kimera-multi: Robust, distributed, dense metric-semantic slam for multi-robot systems,”IEEE Transactions on Robotics, vol. 38, no. 4, 2022
2022
-
[38]
Vision meets robotics: The kitti dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,”The international journal of robotics research, vol. 32, no. 11, pp. 1231–1237, 2013
2013
-
[39]
KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way,
I. Vizzo, T. Guadagnino, B. Mersch, L. Wiesmann, J. Behley, and C. Stachniss, “KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way,”IEEE Robotics and Automation Letters (RA-L), vol. 8, no. 2, pp. 1029–1036, 2023
2023
-
[40]
Direct lidar odometry: Fast localization with dense point clouds,
K. Chen, B. T. Lopez, A.-a. Agha-mohammadi, and A. Mehta, “Direct lidar odometry: Fast localization with dense point clouds,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2000–2007, 2022
2000
-
[41]
Closed-form solution of absolute orientation using unit quaternions,
B. K. Horn, “Closed-form solution of absolute orientation using unit quaternions,”Journal of the optical society of America A, vol. 4, no. 4, pp. 629–642, 1987
1987
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.