Taming Perception Jitter: Uncertainty-Aware LiDAR Object Detection for Reliable Motion Classification
Pith reviewed 2026-06-27 16:26 UTC · model grok-4.3
The pith
Uncertainty estimates from a LiDAR detector plus a z-test can separate real object motion from perception jitter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Augmenting a 3D object detector with aleatoric uncertainty estimates and applying a two-sample z-test over short observation windows separates true motion from jitter, producing parity with velocity thresholding on nuScenes while substantially reducing false dynamic predictions and unnecessary stops in real-world test drives, because the recorded data contain an intermediate jitter band that speed-only rules misclassify.
What carries the argument
Aleatoric uncertainty estimates from the detector combined with a two-sample z-test applied to short observation windows
If this is right
- The method achieves fewer false dynamic predictions than velocity thresholding when an intermediate jitter band is present in the data.
- Integration requires only minimal changes because it reuses existing data association and adds negligible compute.
- Practical performance gains appear specifically in noisier real-world recordings rather than on curated benchmarks.
- False dynamic predictions of static objects decrease, which directly limits unnecessary planner interventions.
Where Pith is reading between the lines
- The same uncertainty-plus-z-test pattern could be applied to camera or radar detections to test whether jitter separation generalizes beyond LiDAR.
- Calibration checks on the uncertainty outputs would become a standard validation step if the approach is adopted in safety-critical stacks.
- Extending the observation window length or switching to a different statistical test might trade responsiveness for even lower false-positive rates in highway versus urban settings.
Load-bearing premise
The aleatoric uncertainty estimates produced by the detector are calibrated enough that a two-sample z-test on short windows reliably separates measurement jitter from genuine object velocity.
What would settle it
A real-world dataset in which the detector's uncertainty values are shown to be poorly calibrated, so that the z-test produces no reduction or an increase in false dynamic labels compared with velocity thresholding alone.
Figures

read the original abstract
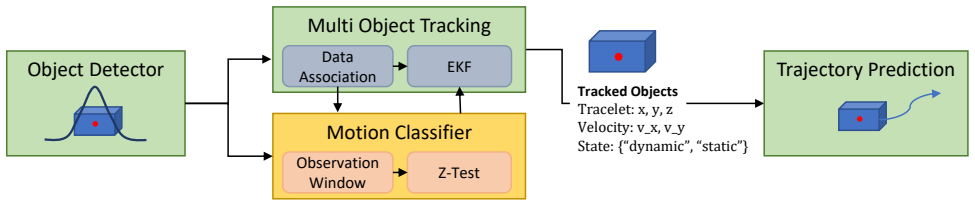
Reliable motion classification is critical for autonomous driving, as false dynamic predictions of static objects can cascade into unnecessary planner interventions. Unstable bounding box predictions can lead to spurious velocity estimates in tracking and falsely predicted trajectories. We present a deployment-friendly mitigation strategy that augments a 3D object detector with aleatoric uncertainty estimates and applies a two-sample z-test over short observation windows to separate true motion from jitter. Integrated into Autoware with minimal changes, the approach reuses existing data association for minimal compute overhead. Empirical results show parity with velocity thresholding on nuScenes, but substantially fewer false dynamic predictions and unnecessary stops in real-world test drives, explained by the presence of an intermediate jitter band in the recorded data that speed-only rules misclassify. This demonstrates that uncertainty-aware detection and lightweight statistical testing can deliver practical performance gains for autonomous driving in noisier real-world settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that augmenting a 3D LiDAR object detector with aleatoric uncertainty estimates and applying a two-sample z-test over short observation windows can separate true object motion from perception jitter. It reports parity with velocity thresholding on nuScenes but substantially fewer false dynamic predictions and unnecessary stops in real-world drives, with easy integration into Autoware via existing data association.
Significance. If the uncertainty estimates prove calibrated, the approach offers a practical, low-overhead post-processing rule that reduces spurious planner interventions in noisy real-world conditions where velocity thresholds fail on an intermediate jitter band. The deployment-friendly design with minimal compute changes is a clear strength.
major comments (2)
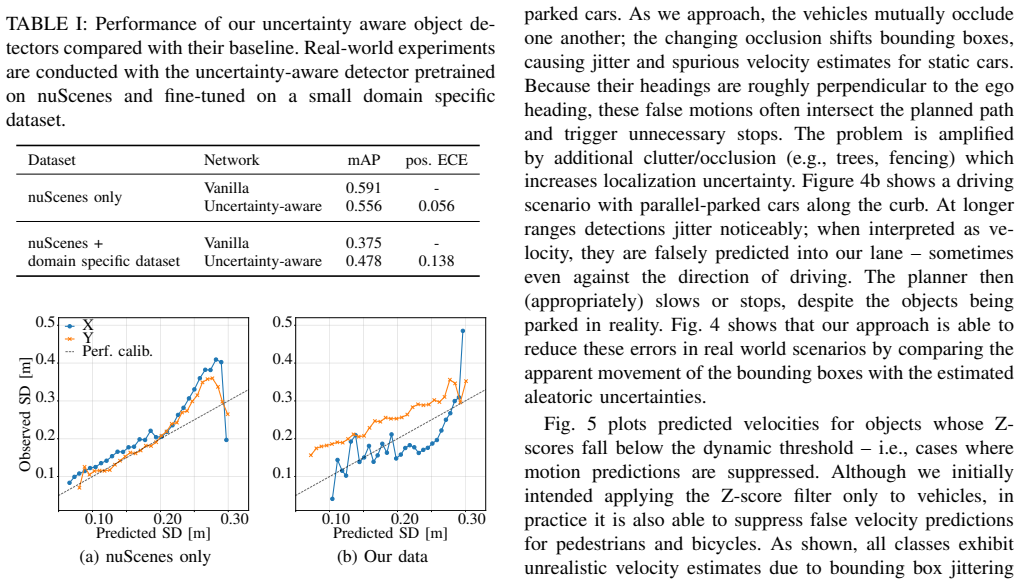
- [Abstract] Abstract: the central claim that the z-test reliably separates jitter from genuine velocity rests on the aleatoric uncertainty estimates being sufficiently calibrated for the test statistic to be valid, yet the manuscript supplies no quantitative calibration results such as reliability diagrams or expected calibration error.
- [Abstract] Abstract and method description: no details are given on how aleatoric uncertainty is extracted from the detector, nor are there ablations on window length or z-threshold, both of which are load-bearing for reproducing and validating the reported real-world gains over baselines.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive comments. We agree that the manuscript would benefit from additional details on uncertainty calibration and extraction methods, as well as ablations on key parameters. We will incorporate these revisions to strengthen the paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the z-test reliably separates jitter from genuine velocity rests on the aleatoric uncertainty estimates being sufficiently calibrated for the test statistic to be valid, yet the manuscript supplies no quantitative calibration results such as reliability diagrams or expected calibration error.
Authors: We acknowledge the importance of demonstrating calibration of the aleatoric uncertainty estimates. The current manuscript does not include quantitative calibration results such as reliability diagrams or expected calibration error. To address this, we will add these analyses in the revised version, computing them on both the nuScenes dataset and the real-world drives to validate the assumptions underlying the z-test. revision: yes
-
Referee: [Abstract] Abstract and method description: no details are given on how aleatoric uncertainty is extracted from the detector, nor are there ablations on window length or z-threshold, both of which are load-bearing for reproducing and validating the reported real-world gains over baselines.
Authors: The manuscript describes the overall approach but indeed lacks specific details on extracting aleatoric uncertainty from the 3D object detector and does not present ablations for the observation window length or z-threshold. We agree these are important for reproducibility. In the revision, we will provide the extraction method details and include ablation studies showing sensitivity to these parameters and their effect on the reported performance gains. revision: yes
Circularity Check
No circularity; method is empirical post-processing without self-referential derivations
full rationale
The paper describes augmenting a 3D detector with aleatoric uncertainty estimates followed by a two-sample z-test on short windows as a deployment-friendly post-processing rule. No equations, fitted parameters, or derivation chain are presented that reduce by construction to inputs. No self-citations, uniqueness theorems, or ansatzes are invoked in the provided text. The approach reuses existing data association and reports empirical results on nuScenes and real-world drives, remaining self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Towards stable 3d object detection,
J. Wang, Q. Meng, G. Liu, L. Yan, K. Wang, M.-M. Cheng, and Q. Hou, “Towards stable 3d object detection,” inComputer Vision – ECCV 2024: 18th European Conference, Milan, Italy, September 29–October 4, 2024, Proceedings, Part L. Berlin, Heidelberg: Springer-Verlag, 2024, p. 197–213
2024
-
[2]
Leveraging heteroscedastic aleatoric uncertainties for robust real-time lidar 3d object detection,
D. Feng, L. Rosenbaum, F. Timm, and K. Dietmayer, “Leveraging heteroscedastic aleatoric uncertainties for robust real-time lidar 3d object detection,” in2019 IEEE Intelligent Vehicles Symposium (IV), 2019, pp. 1280–1287
2019
-
[3]
Karle, T
P. Karle, T. Betz, M. Bosk, F. Fent, N. Gehrke, M. Geisslinger, L. Gressenbuch, P. Hafemann, S. Huber, M. H ¨ubner, S. Huch, G. Kal- javesi, T. Kerbl, D. Kulmer, T. Mascetta, S. Maierhofer, F. Pfab, F. Rezabek, E. Rivera, S. Sagmeister, L. Seidlitz, F. Sauerbeck, I. Tahiraj, R. Trauth, N. Uhlemann, G. W ¨ursching, B. Zarrouki, M. Althoff, J. Betz, K. Beng...
2024
-
[4]
Aleatoric and epistemic uncer- tainty in machine learning: an introduction to concepts and methods,
E. H ¨ullermeier and W. Waegeman, “Aleatoric and epistemic uncer- tainty in machine learning: an introduction to concepts and methods,” Machine Learning, vol. 110, no. 3, pp. 457–506, 2021
2021
-
[5]
Simple and scalable predictive uncertainty estimation using deep ensembles,
B. Lakshminarayanan, A. Pritzel, and C. Blundell, “Simple and scalable predictive uncertainty estimation using deep ensembles,” in Proceedings of the 31st International Conference on Neural Informa- tion Processing Systems, ser. NIPS’17, 2017, p. 6405–6416
2017
-
[6]
Dropout as a bayesian approximation: Representing model uncertainty in deep learning,
Y . Gal and Z. Ghahramani, “Dropout as a bayesian approximation: Representing model uncertainty in deep learning,” inProceedings of The 33rd International Conference on Machine Learning, ser. Proceedings of Machine Learning Research, vol. 48. PMLR, 2016, pp. 1050–1059
2016
-
[7]
Towards safe autonomous driving: Capture uncertainty in the deep neural network for lidar 3d vehicle detection,
Di Feng, L. Rosenbaum, and K. Dietmayer, “Towards safe autonomous driving: Capture uncertainty in the deep neural network for lidar 3d vehicle detection,” in2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 3266–3273
2018
-
[8]
Leveraging monte carlo dropout for uncertainty quantification in real-time object detection of autonomous vehicles,
R. Zhao, K. Wang, Y . Xiao, F. Gao, and Z. Gao, “Leveraging monte carlo dropout for uncertainty quantification in real-time object detection of autonomous vehicles,”IEEE Access, vol. 12, pp. 33 384– 33 399, 2024
2024
-
[9]
Training independent subnetworks for robust prediction
M. Havasi, R. Jenatton, S. Fort, J. Z. Liu, J. Snoek, B. Lakshminarayanan, A. M. Dai, and D. Tran, “Training independent subnetworks for robust prediction.” [Online]. Available: http://arxiv.org/pdf/2010.06610
arXiv 2010
-
[10]
Lidar-mimo: Efficient uncertainty estimation for lidar-based 3d object detection,
M. Pitropov, C. Huang, V . Abdelzad, K. Czarnecki, and S. Waslander, “Lidar-mimo: Efficient uncertainty estimation for lidar-based 3d object detection,” in2022 IEEE Intelligent Vehicles Symposium (IV). IEEE Press, 2022, p. 813–820
2022
-
[11]
A review and comparative study on probabilistic object detection in autonomous driving,
Di Feng, A. Harakeh, S. L. Waslander, and K. Dietmayer, “A review and comparative study on probabilistic object detection in autonomous driving,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 8, pp. 9961–9980, 2022
2022
-
[12]
Uncertainty-aware learning from demonstration using mixture density networks with sampling- free variance modeling,
S. Choi, K. Lee, S. Lim, and S. Oh, “Uncertainty-aware learning from demonstration using mixture density networks with sampling- free variance modeling,” in2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 6915–6922
2018
-
[13]
Lasernet: An efficient probabilistic 3d object detector for autonomous driving,
G. P. Meyer, A. Laddha, E. Kee, C. Vallespi-Gonzalez, and C. K. Wellington, “Lasernet: An efficient probabilistic 3d object detector for autonomous driving,” in2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019, pp. 12 669–12 678
2019
-
[14]
Learning an uncertainty-aware object detector for autonomous driving,
G. P. Meyer and N. Thakurdesai, “Learning an uncertainty-aware object detector for autonomous driving,” in2020 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2020, pp. 10 521–10 527
2020
-
[15]
Poly-mot: A polyhedral framework for 3d multi-object tracking,
X. Li, T. Xie, D. Liu, J. Gao, K. Dai, Z. Jiang, L. Zhao, and K. Wang, “Poly-mot: A polyhedral framework for 3d multi-object tracking,” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 9391–9398, 2023
2023
-
[16]
Fast-poly: A fast polyhedral algorithm for 3d multi-object tracking,
X. Li, D. Liu, Y . Wu, X. Wu, L. Zhao, and J. Gao, “Fast-poly: A fast polyhedral algorithm for 3d multi-object tracking,”IEEE Robotics and Automation Letters, vol. 9, no. 11, pp. 10 519–10 526, 2024
2024
-
[17]
The probabilistic data association filter,
Y . Bar-Shalom, F. Daum, and J. Huang, “The probabilistic data association filter,”IEEE Control Systems Magazine, vol. 29, no. 6, pp. 82–100, 2009
2009
-
[18]
The hungarian method for the assignment problem,
H. W. Kuhn, “The hungarian method for the assignment problem,” Naval Research Logistics Quarterly, vol. 2, no. 1-2, pp. 83–97, 1955
1955
-
[19]
Almost-linear-time algorithms for maximum flow and minimum-cost flow,
L. Chen, R. Kyng, Y . P. Liu, R. Peng, M. P. Gutenberg, and S. Sachdeva, “Almost-linear-time algorithms for maximum flow and minimum-cost flow,”Commun. ACM, vol. 66, no. 12, pp. 85–92, 2023
2023
-
[20]
Deep affinity network for multiple object tracking,
S. Sun, N. Akhtar, H. Song, A. Mian, and M. Shah, “Deep affinity network for multiple object tracking,”IEEE transactions on pattern analysis and machine intelligence, vol. 43, no. 1, pp. 104–119, 2021
2021
-
[21]
3d multi-object tracking using graph neural networks with cross-edge modality attention,
M. B ¨uchner and A. Valada, “3d multi-object tracking using graph neural networks with cross-edge modality attention,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9707–9714, 2022
2022
-
[22]
Trackformer: Multi-object tracking with transformers,
Tim Meinhardt, Alexander Kirillov, Laura Leal-Taixe, and Christoph Feichtenhofer, “Trackformer: Multi-object tracking with transformers,” inThe IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
2022
-
[23]
Bayesian multiobject tracking with neural-enhanced motion and measurement models
S. Wei, M. Liang, and F. Meyer, “Bayesian multiobject tracking with neural-enhanced motion and measurement models.” [Online]. Available: http://arxiv.org/pdf/2506.18124
-
[24]
Segmentation and tracking of static and moving objects in video surveillance scenarios,
J. Gallego, M. Pardas, and J.-L. Landabaso, “Segmentation and tracking of static and moving objects in video surveillance scenarios,” in2008 15th IEEE International Conference on Image Processing. IEEE, 10/12/2008 - 10/15/2008, pp. 2716–2719
2008
-
[25]
Dynamic and static object detection and tracking in an autonomous surface vehicle,
E. Omrani, H. Mousazadeh, M. Omid, M. T. Masouleh, H. Jafarbiglu, Y . Salmani-Zakaria, A. Makhsoos, F. Monhaseri, and A. Kiapei, “Dynamic and static object detection and tracking in an autonomous surface vehicle,”Ships and Offshore Structures, vol. 15, no. 7, pp. 711–721, 2020
2020
-
[26]
Optical flow based detection and tracking of moving objects for au- tonomous vehicles,
M. Alipour Sormoli, M. Dianati, S. Mozaffari, and R. Woodman, “Optical flow based detection and tracking of moving objects for au- tonomous vehicles,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 9, pp. 12 578–12 590, 2024
2024
-
[27]
Classifying static and dynamic tracks for lidar-based navigation of autonomous vehicle systems,
M. Adnan, P. Zontone, L. Marcenaro, D. M. G ´omez, and C. Regazzoni, “Classifying static and dynamic tracks for lidar-based navigation of autonomous vehicle systems,” in2024 9th International Conference on Frontiers of Signal Processing (ICFSP), 2024, pp. 111–117
2024
-
[28]
Center-based 3d object detection and tracking,
T. Yin, X. Zhou, and P. Krahenbuhl, “Center-based 3d object detection and tracking,” in2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2021, pp. 11 779–11 788
2021
-
[29]
What uncertainties do we need in bayesian deep learning for computer vision?
A. Kendall and Y . Gal, “What uncertainties do we need in bayesian deep learning for computer vision?” inAdvances in Neural Informa- tion Processing Systems, vol. 30, 2017
2017
-
[30]
Estimating the mean and variance of the target probability distribution,
D. A. Nix and A. S. Weigend, “Estimating the mean and variance of the target probability distribution,” inProceedings of 1994 IEEE International Conference on Neural Networks (ICNN’94), 1994, pp. 55–60 vol.1
1994
-
[31]
R. C. Sprinthall,Basic statistical analysis / Richard C. Sprinthall, American International College, 9th ed. Boston: Pearson Allyn & Bacon, 2012
2012
-
[32]
mussp: Efficient min-cost flow algorithm for multi-object tracking,
C. Wang, Y . Wang, Y . Wang, C.-T. Wu, and G. Yu, “mussp: Efficient min-cost flow algorithm for multi-object tracking,” inAdvances in Neural Information Processing Systems, vol. 32, 2019
2019
-
[33]
MMDetection3D: OpenMMLab next- generation platform for general 3D object detection,
MMDetection3D Contributors, “MMDetection3D: OpenMMLab next- generation platform for general 3D object detection,” https://github. com/open-mmlab/mmdetection3d, 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.