CoLI: A Reproducible Platform for Continuum Robot Learning via Monolithic 3D Printing and Isomorphic Teleoperation
Pith reviewed 2026-06-26 17:30 UTC · model grok-4.3
The pith
A monolithic 3D-printed continuum robot with direct actuator mapping enables reproducible learning without kinematic models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed system features a simplified fabrication pipeline enabled by multi-material 3D printing, allowing the arm to be fabricated as a monolithic compliant structure with minimal assembly. Control is achieved through an isomorphic teleoperation interface that establishes a direct actuator-level mapping, eliminating the need for explicit kinematic modeling and providing a singularity-free mapping. Building on this hardware design, the platform further supports imitation-learning-based autonomous control. Experimental results demonstrate that the platform provides a reproducible, learning-ready continuum robot system.
What carries the argument
Monolithic multi-material 3D-printed compliant structure paired with actuator-level isomorphic teleoperation mapping that supplies direct, singularity-free control and demonstration data.
If this is right
- Fabrication reduces to standard multi-material printing with little post-processing or assembly.
- Teleoperation and data recording proceed without deriving or solving kinematic equations.
- Demonstration data collected via the interface directly trains imitation-learning controllers.
- Hardware consistency across users enables direct comparison of algorithms on identical platforms.
- The open design lowers the entry cost for new groups to run continuum-robot experiments.
- pith_inferences=[
- Independent labs without specialized fabrication facilities could replicate the full pipeline if the consistency assumption holds.
- The direct-mapping approach could extend to other soft or high-DOF robots where kinematic models remain difficult to obtain.
Load-bearing premise
The monolithic 3D printing process and actuator-level teleoperation mapping will produce consistent functional hardware and data collection pipelines across different fabrication setups and users without requiring additional calibration or modeling.
What would settle it
Multiple independent groups fabricating and operating the robot according to the provided instructions but obtaining inconsistent mechanical behavior or task performance that requires custom calibration or kinematic modeling to match reported results.
Figures


read the original abstract
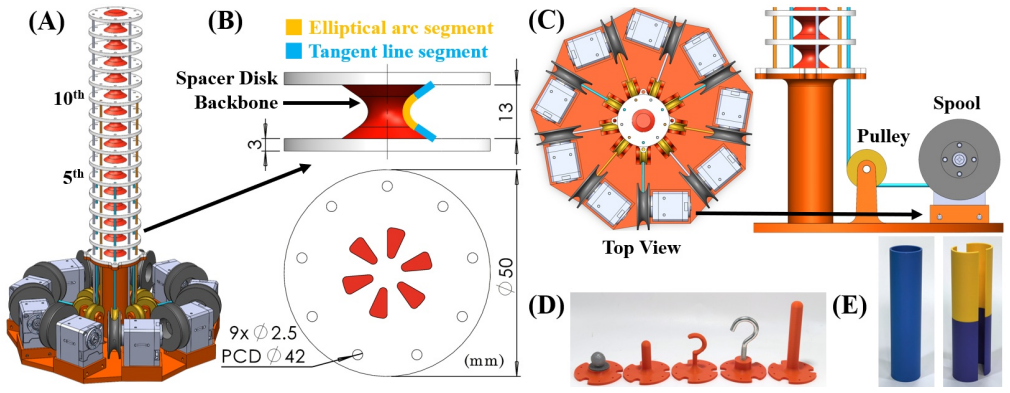
Continuum robots offer strong potential for manipulation tasks due to their high degrees of freedom, compliant structures, and operational safety. However, their adoption in both research and practical applications has been hindered by reproducibility issues arising from complex fabrication and assembly processes, challenging kinematic modeling, and a lack of intuitive control interfaces. To address these challenges, we present a novel open-source continuum robot design. The platform features a simplified fabrication pipeline enabled by multi-material 3D printing, allowing the arm to be fabricated as a monolithic compliant structure with minimal assembly. Control is achieved through an isomorphic teleoperation interface that establishes a direct actuator-level mapping, eliminating the need for explicit kinematic modeling and providing a singularity-free mapping. Building on this hardware design, the platform further supports imitation-learning-based autonomous control. The proposed system is evaluated through hardware characterization and a set of manipulation tasks. Experimental results demonstrate that the platform provides a reproducible, learning-ready continuum robot system, accelerating algorithmic development and systematic benchmarking for the continuum robotics community.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces CoLI, an open-source continuum robot platform that uses monolithic multi-material 3D printing to create a compliant arm with minimal assembly and an isomorphic teleoperation interface providing direct actuator-level mapping without explicit kinematic models. It further supports imitation learning for autonomous control and reports evaluation via hardware characterization and manipulation tasks, claiming the system is reproducible and accelerates benchmarking in continuum robotics.
Significance. If the reproducibility and functionality claims hold with supporting quantitative evidence, the platform could meaningfully lower barriers to entry for continuum robot research by simplifying fabrication and control, enabling broader algorithmic development and systematic comparisons.
major comments (2)
- Abstract: the central claim that 'experimental results demonstrate that the platform provides a reproducible, learning-ready continuum robot system' is unsupported, as the text supplies no methods details, quantitative results, error bars, or data on task success rates.
- Abstract and conclusion: the reproducibility assertion depends on consistent performance of monolithic multi-material prints, yet no inter-print variance data (e.g., stiffness, workspace, or manipulation success across multiple fabrications) is reported, leaving the load-bearing assumption untested.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which identifies opportunities to strengthen the presentation of quantitative evidence and reproducibility claims. We respond to each major comment below.
read point-by-point responses
-
Referee: Abstract: the central claim that 'experimental results demonstrate that the platform provides a reproducible, learning-ready continuum robot system' is unsupported, as the text supplies no methods details, quantitative results, error bars, or data on task success rates.
Authors: We agree that the abstract, being a high-level summary, omits specific quantitative details present in the manuscript's evaluation section. That section describes the hardware characterization methods and reports manipulation task outcomes with associated metrics. We will revise the abstract to incorporate key quantitative results, including task success rates and variability measures, to directly support the claim. revision: yes
-
Referee: Abstract and conclusion: the reproducibility assertion depends on consistent performance of monolithic multi-material prints, yet no inter-print variance data (e.g., stiffness, workspace, or manipulation success across multiple fabrications) is reported, leaving the load-bearing assumption untested.
Authors: The presented results are based on a single monolithic fabrication, as the work prioritizes demonstrating the end-to-end platform and imitation learning pipeline. We acknowledge that explicit inter-print variance statistics are not included. We will revise the abstract and conclusion to ground the reproducibility claim in the design's reduction of assembly steps rather than multi-unit empirical statistics, and note multi-print validation as future work. revision: yes
Circularity Check
No circularity; empirical hardware paper with no derivations or self-referential claims
full rationale
The paper describes a fabrication process via multi-material 3D printing, an isomorphic teleoperation interface, and evaluation via hardware characterization and manipulation tasks. No equations, derivations, fitted parameters, or self-citations appear in the provided text. The reproducibility claim rests on stated experimental results rather than any reduction to inputs by construction, self-definition, or load-bearing self-citation chains. This is the expected outcome for a self-contained empirical systems paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Multi-material 3D printing can reliably produce functional monolithic compliant continuum structures with minimal post-processing.
Reference graph
Works this paper leans on
-
[1]
Continuum robots for medical applications: A survey,
J. Burgner-Kahrs, D. C. Rucker, and H. Choset, “Continuum robots for medical applications: A survey,”IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1261–1280, 2015
2015
-
[2]
Continuum robots for manipu- lation applications: A survey,
S. Kolachalama and S. Lakshmanan, “Continuum robots for manipu- lation applications: A survey,”J. Robotics, vol. 2020, pp. 4 187 048:1– 4 187 048:19, 2020
2020
-
[3]
A survey on design, actuation, modeling, and control of continuum robot,
J. Zhang, Q. Fang, P. Xiang, D. Sun, Y . Xue, R. Jin, K. Qiu, R. Xiong, Y . Wang, and H. Lu, “A survey on design, actuation, modeling, and control of continuum robot,”Cyborg and Bionic Systems, vol. 2022, p. 9754697, 2022
2022
-
[4]
Design and integration of a telerobotic system for minimally invasive surgery of the throat,
N. Simaan, K. Xu, A. Kapoor, W. Wei, P. Kazanzides, P. Flint, and R. Taylor, “Design and integration of a telerobotic system for minimally invasive surgery of the throat,”The International Journal of Robotics Research, vol. 28, no. 9, pp. 1134–1153, 2009
2009
-
[5]
Soft robotic glove for combined assistance and at-home rehabilitation,
P. Polygerinos, Z. Wang, K. C. Galloway, R. J. Wood, and C. J. Walsh, “Soft robotic glove for combined assistance and at-home rehabilitation,”Robotics and Autonomous Systems, vol. 73, pp. 135– 143, 2015, wearable Robotics
2015
-
[6]
Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines,
X. Dong, D. Axinte, D. Palmer, S. Cobos, M. Raffles, A. Rabani, and J. Kell, “Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines,”Robotics and Computer-Integrated Manufacturing, vol. 44, pp. 218–229, 2017
2017
-
[7]
Development of a continuum robot with inflatable stiffness-adjustable elements for in-situ repair of aeroengines,
J.-C. Chang, H. Dai, X. Wang, D. Axinte, and X. Dong, “Development of a continuum robot with inflatable stiffness-adjustable elements for in-situ repair of aeroengines,”Robotics and Computer-Integrated Manufacturing, vol. 95, p. 103018, 2025
2025
-
[8]
The i2snake robotic platform for endoscopic surgery,
P. Berthet-Rayne, G. Gras, K. Leibrandt, P. Wisanuvej, A. Schmitz, C. A. Seneci, and G.-Z. Yang, “The i2snake robotic platform for endoscopic surgery,”Annals of Biomedical Engineering, vol. 46, no. 10, pp. 1663–1675, October 2018
2018
-
[9]
A modular, multi-arm concentric tube robot system with application to transnasal surgery for orbital tumors,
T. L. Bruns, A. A. Remirez, M. A. Emerson, R. A. Lathrop, A. W. Mahoney, H. B. Gilbert, C. L. Liu, P. T. Russell, R. F. Labadie, K. D. Weaver, and R. J. WebsterIII, “A modular, multi-arm concentric tube robot system with application to transnasal surgery for orbital tumors,” The International Journal of Robotics Research, vol. 40, no. 2-3, pp. 521–533, 2021
2021
-
[10]
Miniaturized soft continuum robot with integrated vision: Statics analysis,
T. T. Nguyen, D. Q. Nguyen, and V . A. Ho, “Miniaturized soft continuum robot with integrated vision: Statics analysis,” in2023 IEEE/SICE International Symposium on System Integration (SII), 2023, pp. 1–6
2023
-
[11]
Design and experimental validation of a novel hybrid continuum robot with enhanced dexterity and manipulability in confined space,
X. Ma, X. Wang, Z. Zhang, P. Zhu, S. S. Cheng, and K. W. Samuel Au, “Design and experimental validation of a novel hybrid continuum robot with enhanced dexterity and manipulability in confined space,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 4, pp. 1826– 1835, 2023
2023
-
[12]
A continuum manipulator for open-source surgical robotics research and shared development,
A. B. Clark, V . Mathivannan, and N. Rojas, “A continuum manipulator for open-source surgical robotics research and shared development,” IEEE Transactions on Medical Robotics and Bionics, vol. 3, no. 1, pp. 277–280, 2021
2021
-
[13]
Enhancing continuum robot mobility: Design and control with integrated dual rotational dofs,
P. Yuan, C. Sun, X. Chang, X. Zhang, and R. Kang, “Enhancing continuum robot mobility: Design and control with integrated dual rotational dofs,” in2025 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS), 2025, pp. 3287–3292
2025
-
[14]
Control strategies for soft robotic manipulators: A survey,
T. George Thuruthel, Y . Ansari, E. Falotico, and C. Laschi, “Control strategies for soft robotic manipulators: A survey,”Soft Robotics, vol. 5, no. 2, pp. 149–163, 2018, pMID: 29297756
2018
-
[15]
An integrated design and fabrication strategy for entirely soft, autonomous robots,
M. Wehner, R. L. Truby, D. J. Fitzgerald, B. Mosadegh, G. M. Whitesides, J. A. Lewis, and R. J. Wood, “An integrated design and fabrication strategy for entirely soft, autonomous robots,”Nature, vol. 536, no. 7617, pp. 451–455, Aug. 2016
2016
-
[16]
H2D 3D Printer,
Bambu Lab, “H2D 3D Printer,” https://bambulab.com/en-us/h2d, 2026, accessed: 2026-02-14
2026
-
[17]
Gello: A general, low- cost, and intuitive teleoperation framework for robot manipulators,
P. Wu, Y . Shentu, Z. Yi, X. Lin, and P. Abbeel, “Gello: A general, low- cost, and intuitive teleoperation framework for robot manipulators,” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 12 156–12 163
2024
-
[18]
HOMIE: Humanoid Loco-Manipulation with Isomorphic Exoskeleton Cockpit,
Q. Ben, F. Jia, J. Zeng, J. Dong, D. Lin, and J. Pang, “HOMIE: Humanoid Loco-Manipulation with Isomorphic Exoskeleton Cockpit,” inProceedings of Robotics: Science and Systems, LosAngeles, CA, USA, June 2025
2025
-
[19]
Dexterous manipulation through imitation learning: A survey,
S. An, Z. Meng, C. Tang, Y . Zhou, T. Liu, F. Ding, S. Zhang, Y . Mu, R. Song, W. Zhang, Z. Hou, and H. Zhang, “Dexterous manipulation through imitation learning: A survey,”IEEE Transactions on Automation Science and Engineering, vol. 23, pp. 1760–1792, 2025
2025
-
[20]
Human-like arm motion generation: A review,
G. Gulletta, W. Erlhagen, and E. Bicho, “Human-like arm motion generation: A review,”Robotics, vol. 9, no. 4, 2020
2020
-
[21]
Lerobot: State-of-the-art machine learning for real-world robotics in pytorch,
R. Cadene, S. Alibert, A. Soare, Q. Gallouedec, A. Zouitine, S. Palma, P. Kooijmans, M. Aractingi, M. Shukor, D. Aubakirova, M. Russi, F. Capuano, C. Pascal, J. Choghari, J. Moss, and T. Wolf, “Lerobot: State-of-the-art machine learning for real-world robotics in pytorch,” https://github.com/huggingface/lerobot, 2024
2024
-
[22]
Tendon-driven continuum robots for aerial manipulation—a survey of fabrication methods,
A. Uthayasooriyan, F. Vanegas, A. Jalali, K. M. Digumarti, F. Janabi- Sharifi, and F. Gonzalez, “Tendon-driven continuum robots for aerial manipulation—a survey of fabrication methods,”Drones, vol. 8, no. 6, 2024
2024
-
[23]
Design and kinematics of cable-driven continuum robot arm with universal joint backbone,
A. Yeshmukhametov, K. Koganezawa, and Y . Yamamoto, “Design and kinematics of cable-driven continuum robot arm with universal joint backbone,” in2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2018, pp. 2444–2449
2018
-
[24]
Simplified sensing and control of a plant-inspired cable driven manipulator,
F. Visentin, A. K. Mishra, G. A. Naselli, and B. Mazzolai, “Simplified sensing and control of a plant-inspired cable driven manipulator,” in 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), 2019, pp. 422–427
2019
-
[25]
A lightweight modu- lar segment design for tendon-driven continuum robots with pre- programmable stiffness,
P. T. Dewi, P. Rao, and J. Burgner-Kahrs, “A lightweight modu- lar segment design for tendon-driven continuum robots with pre- programmable stiffness,” in2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), 2024, pp. 531–536
2024
-
[26]
Xstrings: 3d printing cable-driven mechanism for actuation, deformation, and manipulation,
J. Li, S. Feng, M. Perroni-Scharf, Y . Liu, E. Guan, G. Wang, and S. Mueller, “Xstrings: 3d printing cable-driven mechanism for actuation, deformation, and manipulation,” inProceedings of the 2025 CHI Conference on Human Factors in Computing Systems, ser. CHI ’25, New York, NY , USA, 2025
2025
-
[27]
OPEN TEACH: A versatile teleoperation system for robotic manipulation,
A. Iyer, Z. Peng, Y . Dai, I. Guzey, S. Haldar, S. Chintala, and L. Pinto, “OPEN TEACH: A versatile teleoperation system for robotic manipulation,” in8th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, vol. 270. PMLR, 2025, pp. 2372– 2395
2025
-
[28]
A robotic tele- operation system enhanced by augmented reality for natural human- robot interaction,
X. Wang, S. Guo, Z. Xu, Z. Zhang, Z. Sun, and Y . Xu, “A robotic tele- operation system enhanced by augmented reality for natural human- robot interaction,”Cyborg and Bionic Systems, vol. 5, p. 0098, 2024, eCollection 2024
2024
-
[29]
Teleoperation control of a redundant continuum manipulator using a non-redundant rigid- link master,
A. D. Kapadia, I. D. Walker, and E. Tatlicioglu, “Teleoperation control of a redundant continuum manipulator using a non-redundant rigid- link master,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012, pp. 3105–3110
2012
-
[30]
Teleop- eration mappings from rigid link robots to their extensible continuum counterparts,
C. G. Frazelle, A. D. Kapadia, K. E. Fry, and I. D. Walker, “Teleop- eration mappings from rigid link robots to their extensible continuum counterparts,” in2016 IEEE International Conference on Robotics and Automation (ICRA), 2016, pp. 4093–4100
2016
-
[31]
Design and analytical modeling of a double-joint flexible surgical instrument with hand-held isomorphic actuation,
C. Wang, Y . Zhou, and X. Wang, “Design and analytical modeling of a double-joint flexible surgical instrument with hand-held isomorphic actuation,”Mechanism and Machine Theory, vol. 203, p. 105804, 2024
2024
-
[32]
Design and evaluation of robotic steering of a flexible endoscope,
J. Ruiter, E. Rozeboom, M. van der V oort, M. Bonnema, and I. Broeders, “Design and evaluation of robotic steering of a flexible endoscope,” in2012 4th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, 2012, pp. 761–767
2012
-
[33]
Survey of imitation learning for robotic manipulation,
B. Fang, S. Jia, D. Guo, M. Xu, S. Wen, and F. Sun, “Survey of imitation learning for robotic manipulation,”International Journal of Intelligent Robotics and Applications, vol. 3, no. 4, pp. 362–369, Dec. 2019
2019
-
[34]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,” in Proceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[35]
Learning fine-grained bimanual manipulation with low-cost hardware,
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine-grained bimanual manipulation with low-cost hardware,” inProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, July 2023
2023
-
[36]
Cloudgripper: An open source cloud robotics testbed for robotic manipulation research, benchmarking and data collection at scale,
M. Zahid and F. T. Pokorny, “Cloudgripper: An open source cloud robotics testbed for robotic manipulation research, benchmarking and data collection at scale,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 12 076–12 082
2024
-
[37]
Rlbench: The robot learning benchmark & learning environment,
S. James, Z. Ma, D. R. Arrojo, and A. J. Davison, “Rlbench: The robot learning benchmark & learning environment,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3019–3026, 2020
2020
-
[38]
Aecom: An aerial continuum ma- nipulator with imu-based kinematic modeling and tendon-slacking prevention,
R. Peng, Z. Wang, and P. Lu, “Aecom: An aerial continuum ma- nipulator with imu-based kinematic modeling and tendon-slacking prevention,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 53, no. 8, pp. 4740–4752, 2023
2023
-
[39]
Design and kinematic modeling of constant curvature continuum robots: A review,
R. J. WebsterIII and B. A. Jones, “Design and kinematic modeling of constant curvature continuum robots: A review,”The International Journal of Robotics Research, vol. 29, no. 13, pp. 1661–1683, 2010
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.