Deep RL- Tuned Mo del-Free Adaptive Control for Lower-Limb Exoskeletons During Sit-to-Stand Transitions
Pith reviewed 2026-06-26 12:13 UTC · model grok-4.3
The pith
Integrating a TD3 deep reinforcement learning agent with model-free adaptive control yields 0.078 degree average joint tracking error for lower-limb exoskeletons in sit-to-stand transitions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
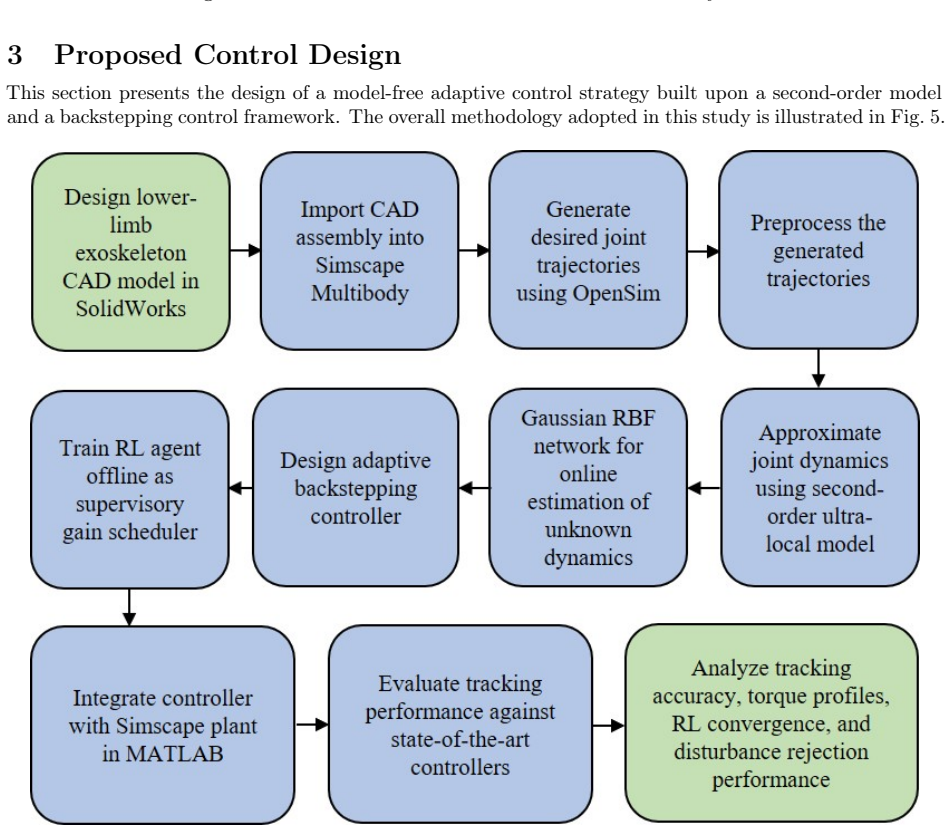
The central claim is that the proposed controller, which combines radial basis function neural network estimation of unknown dynamics within a model-free adaptive backstepping framework and uses a Twin Delayed Deep Deterministic Policy Gradient agent to schedule gains across sit-to-stand phases, achieves an average RMSE of 0.078 degrees across all joints. This performance improves on proportional-integral-derivative control by 60.2 percent, standalone model-free adaptive control by 54.4 percent, linear quadratic regulator by 48.7 percent, and sliding-mode control by 42.6 percent. The TD3 scheduler further lowers tracking error by 35 percent at the hip, 33 percent at the knee, and 79 percent
What carries the argument
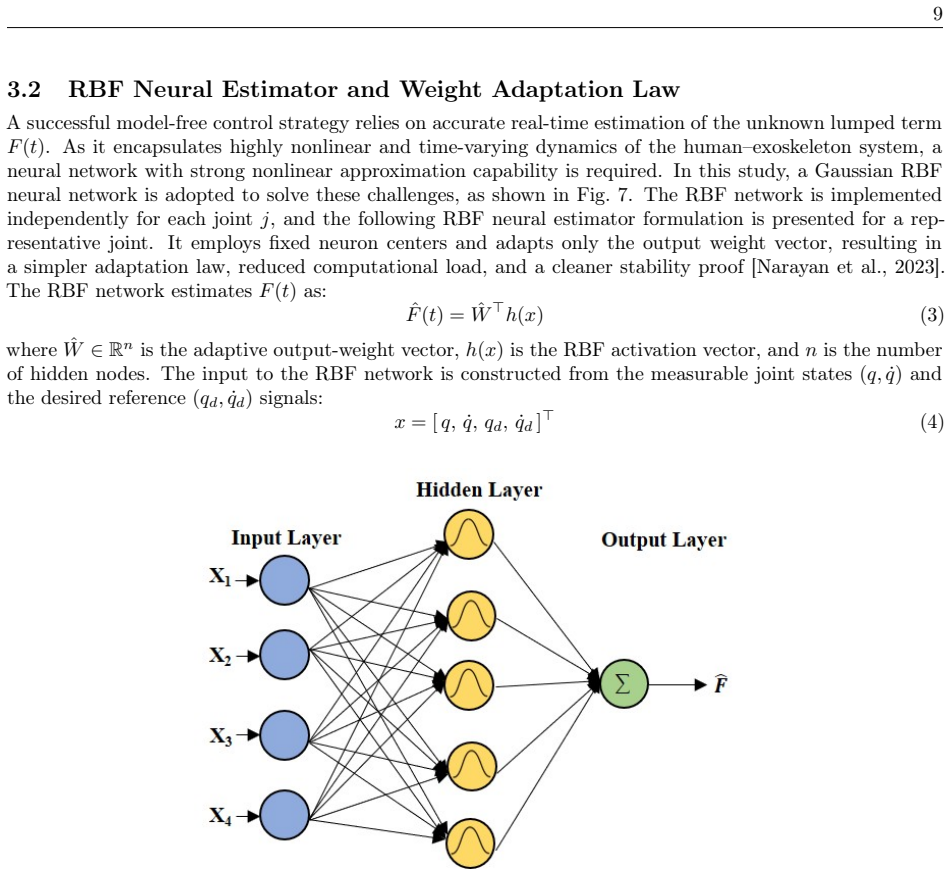
TD3 reinforcement learning agent acting as supervisory gain scheduler for the ultra-local second-order model with RBF neural network estimation in the adaptive backstepping controller
If this is right
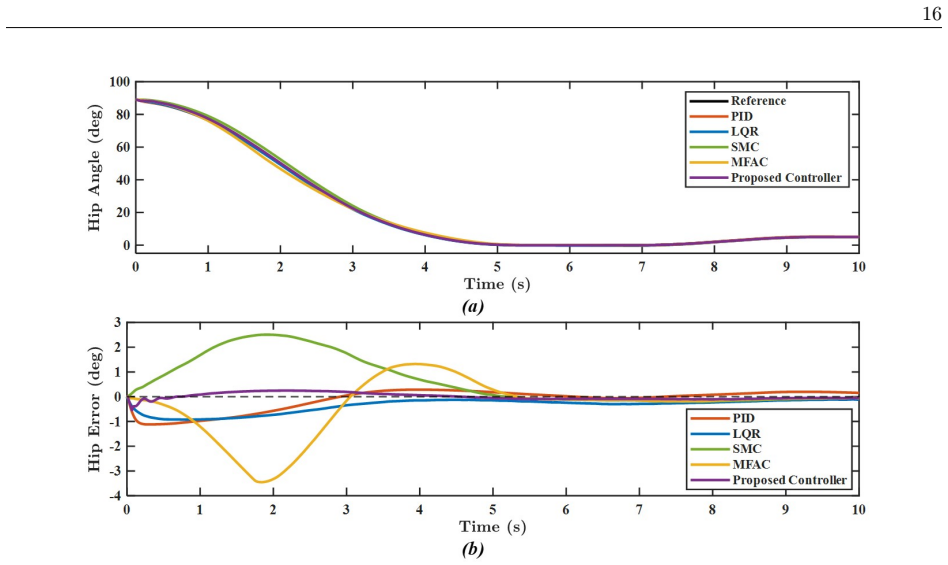
- The integrated controller records the lowest average RMSE of 0.078 degrees across hip, knee, and ankle joints.
- TD3 gain scheduling reduces hip tracking error by 35 percent, knee error by 33 percent, and ankle error by 79 percent versus the RBF-MFAC baseline.
- The design maintains phase-aware performance without requiring explicit system identification.
- The approach outperforms four standard controllers by 42.6 to 60.2 percent in tracking accuracy.
Where Pith is reading between the lines
- Hardware deployment on physical exoskeletons could test whether the simulated error reductions hold under real sensor noise and actuator limits.
- The same TD3 scheduling structure might extend to other periodic exoskeleton tasks such as level walking or stair ascent with minimal redesign.
- Reduced need for subject-specific models could lower the barrier to clinical trials across diverse user populations.
- Online gain adaptation may improve robustness when users change posture or load during assistance.
Load-bearing premise
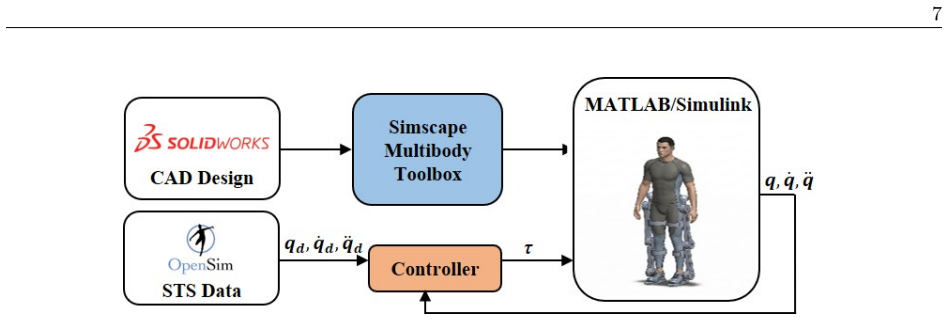
The MATLAB/Simulink and Simscape Multibody co-simulation using OpenSim-derived trajectories sufficiently captures real time-varying human-exoskeleton interaction dynamics and inter-subject variability during sit-to-stand transitions.
What would settle it
A physical experiment on multiple human subjects wearing the exoskeleton that records actual joint angle errors during repeated sit-to-stand movements and checks whether average RMSE remains near 0.078 degrees.
Figures








read the original abstract
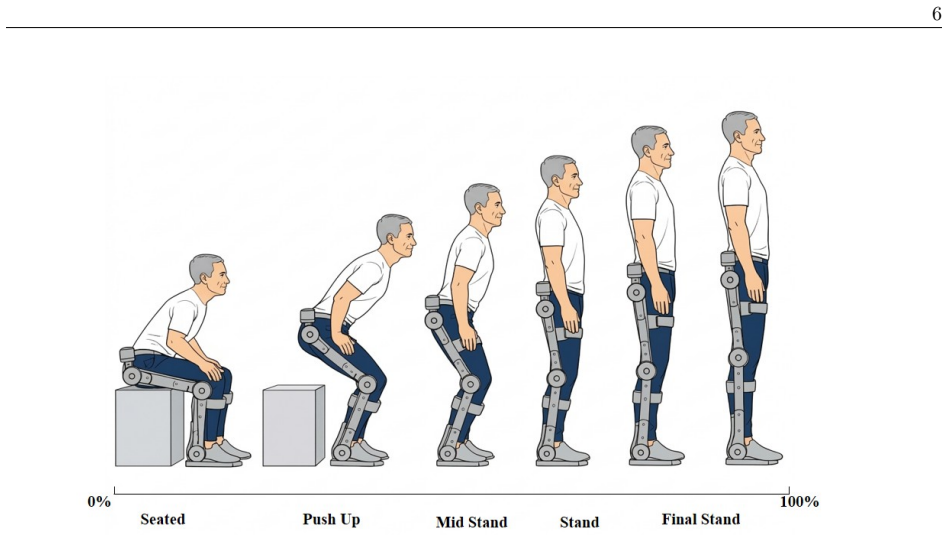
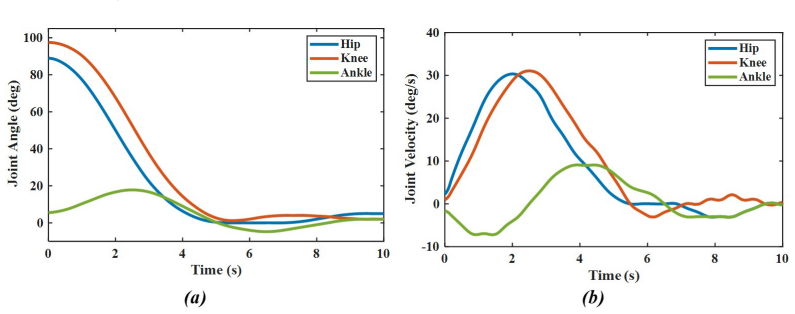
Sit-to-stand (STS) transitions impose significant joint-loading demands on elderly individuals, making them a primary target for lower-limb exoskeleton assistance. However, accurate trajectory tracking during STS is challenging due to complex, time-varying human exoskeleton interaction dynamics and inter-subject variability that render model-based control approaches difficult to apply in practice. This paper presents an intelligent model free adaptive backstepping control strategy for a bilateral lower-limb exoskeleton during STS motion. The proposed controller design uses an ultra-local second-order model to avoid explicit system identification, while a Gaussian radial basis function (RBF) neural network estimates the unknown lumped dynamics online. To further improve phase-aware tracking performance, a Twin Delayed Deep Deterministic Policy Gradient (TD3) reinforcement learning agent is integrated as a supervisory gain scheduler that adaptively adjusts controller gains across the distinct phases of STS motion. The proposed controller is evaluated through co-simulation in MATLAB/Simulink and Simscape Multibody using OpenSim-derived reference trajectories and benchmarked against state-of-the-art controllers. Results demonstrate that the proposed controller achieves the lowest average RMSE of 0.078 degree across all joints, representing improvements of 60.2%, 54.4%, 48.7%, and 42.6% over proportional integral derivative (PID), model-free adaptive control (MFAC), linear quadratic regulator (LQR), and sliding-mode control (SMC), respectively. TD3 integration further reduces tracking error by 35%, 33%, and 79% at the hip, knee, and ankle joints compared to the standalone RBF-MFAC baseline. These results demonstrate the effectiveness and robustness of the proposed controller design for assistive exoskeleton control during STS transitions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an intelligent model-free adaptive backstepping controller for bilateral lower-limb exoskeletons during sit-to-stand (STS) transitions. It uses an ultra-local second-order model with online RBF neural network estimation of lumped dynamics, augmented by a TD3 RL agent as a supervisory gain scheduler for phase-aware performance. The controller is evaluated exclusively via MATLAB/Simulink + Simscape Multibody co-simulation driven by OpenSim reference trajectories and benchmarked against PID, MFAC, LQR, and SMC, claiming an average RMSE of 0.078° with 42.6–60.2% improvements over baselines and additional 33–79% error reductions from TD3 at individual joints.
Significance. If the simulation results translate to hardware, the combination of model-free adaptation with deep RL for adaptive gain scheduling could offer a practical approach to handling time-varying human-exoskeleton dynamics and inter-subject variability in assistive robotics applications.
major comments (2)
- [Evaluation / Results] Evaluation section (as described in the abstract): The central quantitative claims—average RMSE of 0.078°, percentage improvements of 60.2/54.4/48.7/42.6% over PID/MFAC/LQR/SMC, and 35/33/79% further reductions at hip/knee/ankle from TD3—are obtained solely from co-simulation. No hardware validation, sensor-noise injection, or sensitivity analysis to unmodeled effects (soft-tissue compliance, variable ground reaction forces) is reported, leaving the conclusion that the results demonstrate effectiveness for real assistive exoskeleton control unsupported.
- [Methods (TD3 integration)] Methods (TD3 integration, as referenced in the abstract): The manuscript provides no details on TD3 training procedure, reward design, hyperparameter values, number of episodes, or statistical tests underlying the reported RMSE and improvement percentages. This renders the performance numbers difficult to reproduce or assess for robustness.
minor comments (1)
- [Abstract] Abstract: The reported average RMSE of 0.078 degree does not specify whether it is computed across joints, trials, or subjects, nor does it include standard deviation or confidence intervals.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major point below, acknowledging the simulation-only nature of the study while proposing targeted revisions to improve clarity, reproducibility, and transparency.
read point-by-point responses
-
Referee: [Evaluation / Results] Evaluation section (as described in the abstract): The central quantitative claims—average RMSE of 0.078°, percentage improvements of 60.2/54.4/48.7/42.6% over PID/MFAC/LQR/SMC, and 35/33/79% further reductions at hip/knee/ankle from TD3—are obtained solely from co-simulation. No hardware validation, sensor-noise injection, or sensitivity analysis to unmodeled effects (soft-tissue compliance, variable ground reaction forces) is reported, leaving the conclusion that the results demonstrate effectiveness for real assistive exoskeleton control unsupported.
Authors: We agree that all quantitative results are derived from co-simulation using MATLAB/Simulink, Simscape Multibody, and OpenSim trajectories, which provides a standardized, repeatable testbed for comparing controllers under consistent dynamics. The manuscript does not include hardware experiments, sensor noise injection, or explicit sensitivity analysis to soft-tissue effects or variable ground reactions. We will revise the abstract, results, and conclusion to explicitly qualify all claims as 'in simulation' and add a new Limitations and Future Work subsection that discusses these gaps, including plans for hardware validation on a physical exoskeleton platform. This addresses the concern without overstating the current evidence. revision: partial
-
Referee: [Methods (TD3 integration)] Methods (TD3 integration, as referenced in the abstract): The manuscript provides no details on TD3 training procedure, reward design, hyperparameter values, number of episodes, or statistical tests underlying the reported RMSE and improvement percentages. This renders the performance numbers difficult to reproduce or assess for robustness.
Authors: We acknowledge the lack of these implementation details in the submitted version. The TD3 agent used a reward function combining negative tracking error, control effort penalty, and phase-transition smoothness, with actor and critic networks of two hidden layers (256 units each), learning rates of 3e-4, discount factor 0.99, target update rate 0.005, and training over 10,000 episodes with a replay buffer of 1e6. Results reflect a single converged policy; no multi-seed statistical tests were performed. We will insert a dedicated TD3 Implementation subsection in Methods with these specifications, the full reward equation, and a note on the single-run nature as a limitation to improve reproducibility. revision: yes
Circularity Check
No significant circularity in derivation or performance claims
full rationale
The paper describes a controller architecture (ultra-local model + RBF NN + TD3 gain scheduler) and reports simulation RMSE values obtained by direct numerical comparison against standard baselines (PID, MFAC, LQR, SMC) in MATLAB/Simulink co-simulation. No equation or result reduces the reported tracking errors or percentage improvements to quantities defined by the paper's own fitted parameters, self-citations, or ansatzes; the performance numbers are independent empirical outputs of the simulation runs rather than tautological re-statements of inputs.
Axiom & Free-Parameter Ledger
free parameters (2)
- TD3 agent hyperparameters and reward weights
- RBF network learning rates and basis widths
axioms (1)
- domain assumption An ultra-local second-order model plus online RBF estimation is sufficient to capture the essential lumped dynamics without explicit identification of human-exoskeleton interaction.
Reference graph
Works this paper leans on
-
[1]
World Population Prospects: The 2017 Revision , institution =
2017
-
[2]
and Bassement, J
Shukla, B. and Bassement, J. and Vijay, V. and Yadav, S. and Hewson, D. , title =. Bioengineering , volume =
-
[3]
and Huang, Y
Wang, X. and Huang, Y. and Chen, Y. and Yang, T. and Su, W. and Chen, X. and Yan, F. and Han, L. and Ma, Y. , title =. Journal of Neurology , volume =
-
[4]
Feigin, V. L. and Brainin, M. and Norrving, B. and Martins, S. and Sacco, R. L. and Hacke, W. and Fisher, M. and Pandian, J. and Lindsay, P. , title =. International Journal of Stroke , volume =
-
[5]
Young, A. J. and Ferris, D. P. , title =. IEEE Transactions on Neural Systems and Rehabilitation Engineering , volume =
-
[6]
Dall, P. M. and Kerr, A. , title =. Applied Ergonomics , volume =
-
[7]
and Losa-Reyna, J
Alcazar, J. and Losa-Reyna, J. and Rodriguez-Lopez, C. and Alfaro-Acha, A. and Rodriguez-Ma. The Sit-to-Stand Muscle Power Test: An Easy, Inexpensive, and Portable Procedure to Assess Muscle Power in Older People , journal =
-
[8]
, title =
Pransky, J. , title =. Industrial Robot , volume =
-
[9]
Banala, S. K. and Agrawal, S. K. and Kim, S. H. and Scholz, J. P. , title =. IEEE/ASME Transactions on Mechatronics , volume =
-
[10]
and Frey, M
Bernhardt, M. and Frey, M. and Colombo, G. and Riener, R. , title =. Proceedings of the IEEE International Conference on Rehabilitation Robotics , pages =. 2005 , doi =
2005
-
[11]
and Ma, W
Li, Z. and Ma, W. and Yin, Z. and Guo, H. , title =. ISA Transactions , volume =
-
[12]
and Ramli, R
Aliman, N. and Ramli, R. and Haris, S. M. , title =. Robotics and Autonomous Systems , volume =
-
[13]
Shepherd, M. K. and Rouse, E. J. , title =. IEEE/ASME Transactions on Mechatronics , volume =
-
[14]
and Tanghe, K
Vantilt, J. and Tanghe, K. and Afschrift, M. and Bruijnes, A. K. B. D. and Junius, K. and Geeroms, J. and Aertbeli. Model-Based Control for Exoskeletons with Series Elastic Actuators Evaluated on Sit-to-Stand Movements , journal =
-
[15]
and Moon, H
Huo, W. and Moon, H. and Alouane, M. A. and Bonnet, V. and Huang, J. and Amirat, Y. and Vaidyanathan, R. and Mohammed, S. , title =. IEEE Transactions on Robotics , volume =
-
[16]
Roelker, S. A. and Schmitt, L. C. and Chaudhari, A. M. W. and Siston, R. A. , title =. PLoS One , volume =
-
[17]
and Erickson, E
Fernandez-Montoya, M. and Erickson, E. J. and Gallego, J. A. and Aguirre, M. E. , title =. ASME Journal of Mechanisms and Robotics , volume =
-
[18]
and Huang, Y
Cheng, G. and Huang, Y. and Zhang, X. , title =. Nonlinear Dynamics , volume =
-
[19]
Robust Nonsingular Fast Terminal Sliding-Mode Control for Sit-to-Stand Task Using a Mobile Lower Limb Exoskeleton , journal =
Hern. Robust Nonsingular Fast Terminal Sliding-Mode Control for Sit-to-Stand Task Using a Mobile Lower Limb Exoskeleton , journal =
-
[20]
and Abbas, M
Narayan, J. and Abbas, M. and Dwivedy, S. K. , title =. Transactions of the Institute of Measurement and Control , volume =
-
[21]
and Gaur, P
Sharma, R. and Gaur, P. and Bhatt, S. and Joshi, D. , title =. Applied Soft Computing , volume =
-
[22]
and Han, J
Yang, S. and Han, J. and Xia, L. and Chen, Y.-H. , title =. Mechanical Systems and Signal Processing , volume =
-
[23]
and Zhou, Z
Liu, X. and Zhou, Z. and Mai, J. and Wang, Q. , title =. Robotics and Autonomous Systems , volume =
-
[24]
and Hommel, G
Fleischer, C. and Hommel, G. , title =. IEEE Transactions on Robotics , volume =
-
[25]
and Fu, R
Yu, S. and Fu, R. and Ye, C. and Li, H. , title =. ASME Journal of Mechanisms and Robotics , volume =
-
[26]
and Join, C
Fliess, M. and Join, C. , title =. International Journal of Control , volume =
-
[27]
and Kenas, F
Amara, Y. and Kenas, F. , title =. Journal of the Brazilian Society of Mechanical Sciences and Engineering , volume =
-
[28]
Khan, S. G. and Tufail, M. and Shah, S. H. and Ullah, I. , title =. Advanced Robotics , volume =
-
[29]
Delp, S. L. and Anderson, F. C. and Arnold, A. S. and Loan, P. and Habib, A. and John, C. T. and Guendelman, E. and Thelen, D. G. , title =. IEEE Transactions on Biomedical Engineering , volume =
-
[30]
and Singh, R
Kumbhar, R. and Singh, R. and Gadade, A. M. and Singla, A. and Hussain, I. , title =. arXiv preprint , year =
-
[31]
and Abbas, M
Narayan, J. and Abbas, M. and Patel, B. and Dwivedy, S. K. , title =. Intelligent Service Robotics , volume =
-
[32]
and Sandberg, I
Park, J. and Sandberg, I. W. , title =. Neural Computation , volume =
-
[33]
and Aguilar-Ibanez, C
Moran-Armenta, M. and Aguilar-Ibanez, C. and Moreno-Valenzuela, J. , title =. Cybernetics and Systems , pages =
-
[34]
and Hoof, H
Fujimoto, S. and Hoof, H. and Meger, D. , title =. Proceedings of the 35th International Conference on Machine Learning (ICML 2018) , address =
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.