Flow6D: Discrete-to-Continuous Flow Matching for Efficient and Accurate Category-Level 6D Pose Estimation
Pith reviewed 2026-06-26 08:37 UTC · model grok-4.3
The pith
Flow6D narrows 6D pose search with discrete flow matching then refines via continuous residuals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
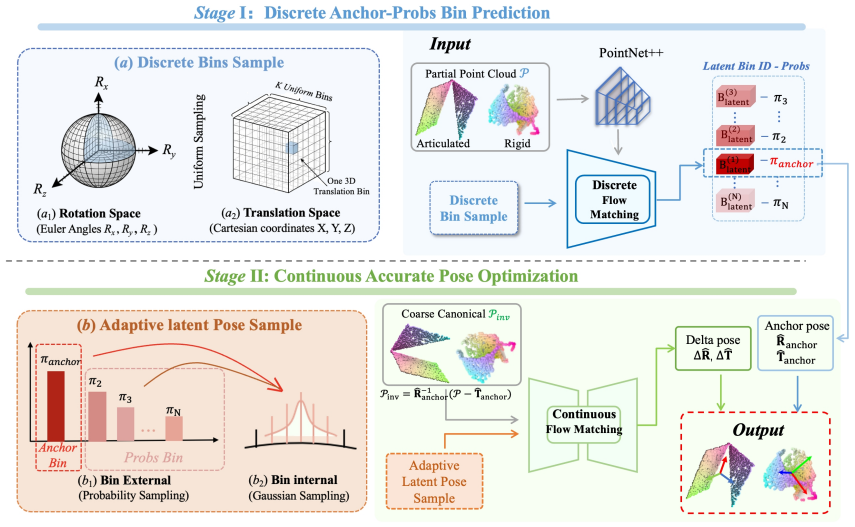
By first discretizing rotation and translation parameters into bins, a discrete flow matching model can lock the latent space around the true pose and thereby shrink the search space; sampling from that localized space then lets a continuous flow matching model predict local residuals that regress to an accurate final pose.
What carries the argument
The two-stage discrete latent space localization followed by continuous pose regression using flow matching models.
If this is right
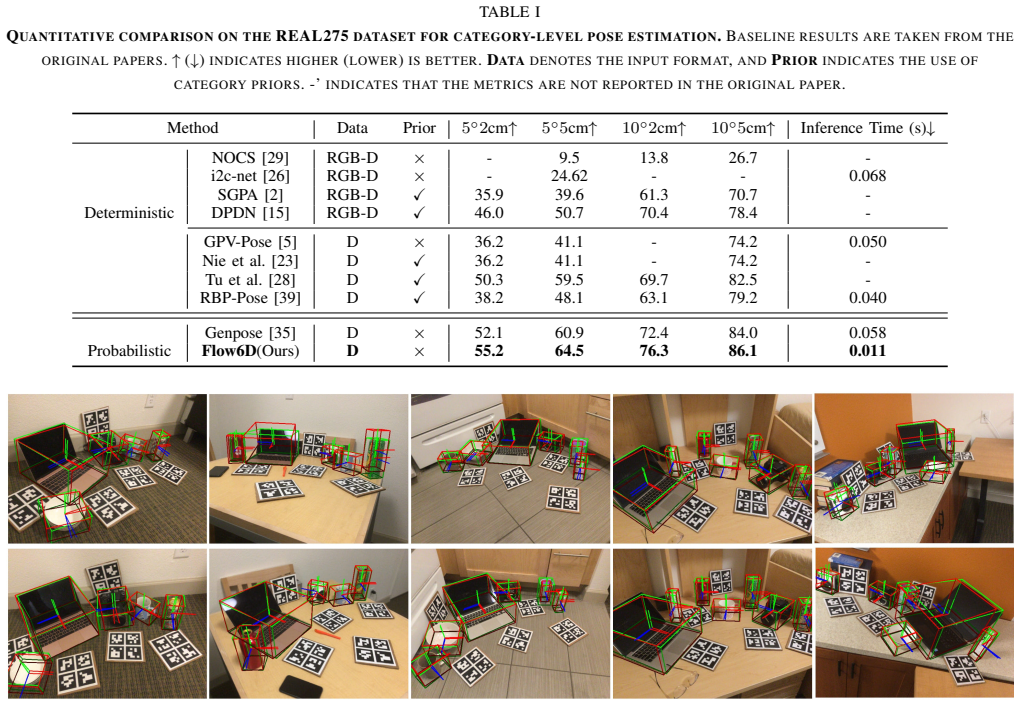
- The method outperforms prior state-of-the-art approaches on both synthetic and real datasets for category-level 6D pose estimation.
- Inference reaches real-time speeds of 70 frames per second.
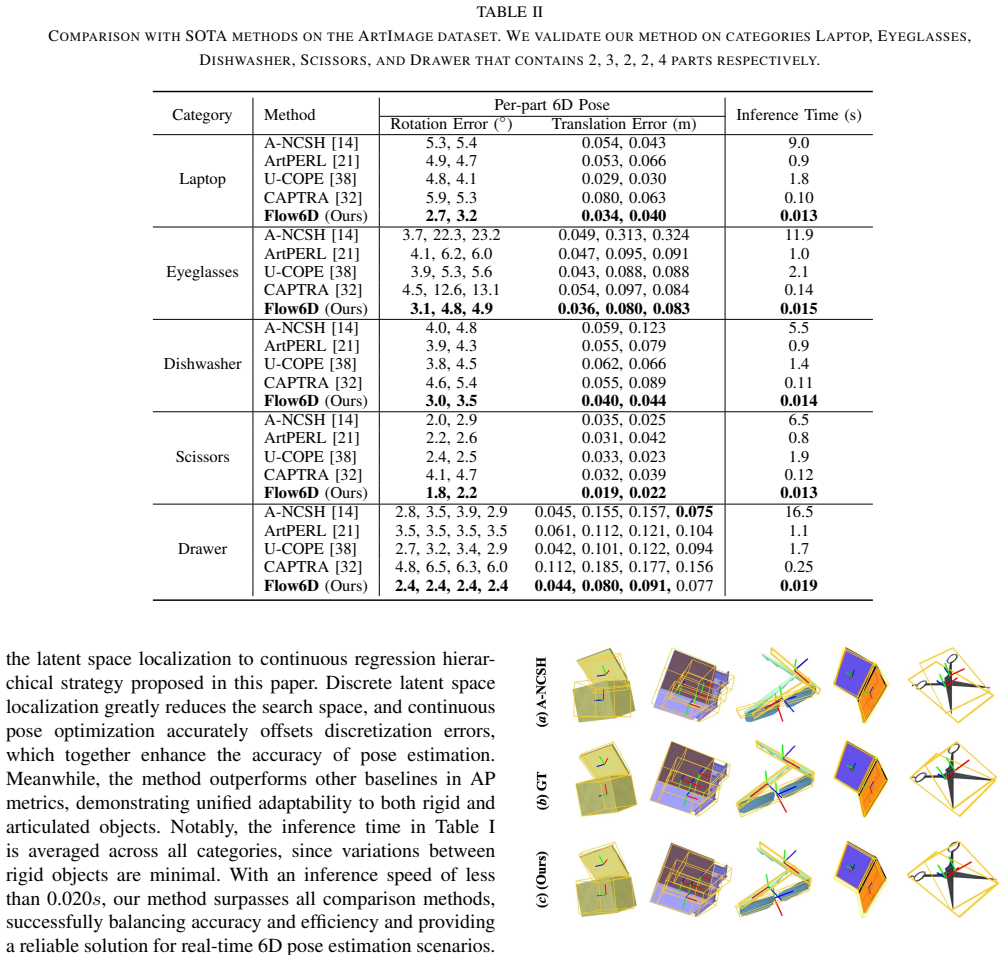
- The same hierarchical structure applies directly to articulated objects without further redesign.
Where Pith is reading between the lines
- Faster and more robust pose estimates could reduce planning time in robotic manipulation pipelines that rely on category-level recognition.
- The discrete-then-continuous pattern may generalize to other high-dimensional continuous regression tasks where exhaustive search is prohibitive.
- If binning errors prove common under real-world lighting or occlusion, adding a small number of overlapping bins could serve as a low-cost safeguard.
Load-bearing premise
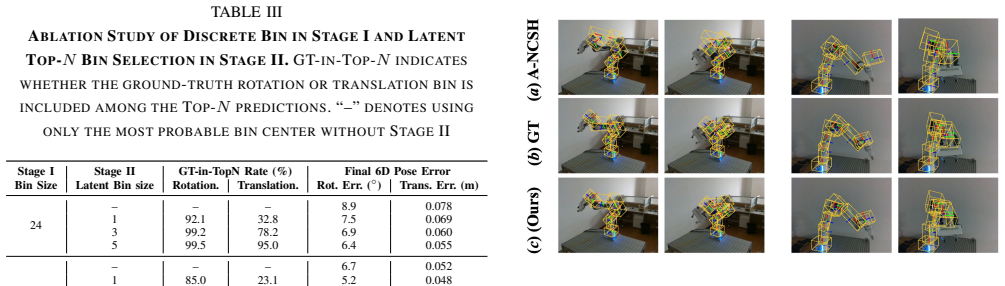
Discretizing rotation and translation into bins lets the discrete flow stage reliably center its latent distribution on the true pose without systematic misses caused by bin boundaries or sensor noise.
What would settle it
A benchmark dataset in which added sensor noise or fine bin boundaries cause the true pose to lie outside every bin chosen by the discrete stage, after which the continuous stage cannot recover an accurate estimate.
Figures

read the original abstract
6D pose estimation is a key task in computer vision and embodied AI, widely used in robotic manipulation, augmented reality, etc. Existing methods directly regress in a high-dimensional continuous space, facing two key challenges in category-level pose estimation: limited accuracy due to noise and local optima, and inefficient search over an infinite space that hinders real-time performance. This paper proposes Flow6D, a hierarchical flow matching framework with a two-stage discrete latent space localization-continuous pose regression strategy. Rotation and translation parameters are first discretized into bins, with a discrete flow matching model locking the latent space around the true pose to reduce search complexity. Then, by sampling in the latent space, a continuous flow matching model predicts local pose residuals to optimize the estimate and regress to an accurate pose. The framework also naturally extends to articulated objects, outperforming state-of-the-art methods on synthetic and real datasets with real-time inference at 70 FPS. Project website: https://flow6d.github.io/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Flow6D, a hierarchical flow matching framework for category-level 6D pose estimation using a two-stage discrete-to-continuous strategy. Rotation and translation parameters are discretized into bins; a discrete flow matching model first localizes the latent space around the true pose, after which a continuous flow matching model predicts local pose residuals via sampling. The method is claimed to outperform state-of-the-art approaches on synthetic and real datasets, run at 70 FPS, and extend naturally to articulated objects.
Significance. If the two-stage pipeline is shown to work, the approach could meaningfully improve both accuracy and real-time performance in category-level 6D pose estimation by shrinking the effective search space while retaining continuous refinement, with direct relevance to robotics and AR. The claimed extension to articulated objects would further broaden its utility.
major comments (1)
- Abstract: The central claim that binning rotation/translation parameters enables the discrete flow matching stage to reliably localize the latent distribution around the true pose rests on an unverified assumption; no analysis, equations, or experiments are supplied to quantify discretization error, bin size effects, or robustness to sensor noise, leaving open the possibility of systematic misses that would undermine the subsequent continuous stage.
Simulated Author's Rebuttal
We thank the referee for their review and for highlighting the need for stronger justification of the discrete stage. We address the major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: Abstract: The central claim that binning rotation/translation parameters enables the discrete flow matching stage to reliably localize the latent distribution around the true pose rests on an unverified assumption; no analysis, equations, or experiments are supplied to quantify discretization error, bin size effects, or robustness to sensor noise, leaving open the possibility of systematic misses that would undermine the subsequent continuous stage.
Authors: We agree that the abstract states the localization benefit of discretization without accompanying analysis. In the revised manuscript we will add a dedicated subsection (and supporting equations) that derives the expected localization radius as a function of bin width, reports empirical success rates of the discrete stage in placing the true pose inside the continuous refinement window, and includes ablation experiments on bin size and additive sensor noise. These additions will quantify the discretization error and demonstrate that systematic misses remain below the threshold handled by the continuous stage. revision: yes
Circularity Check
No significant circularity
full rationale
The paper introduces a new two-stage hierarchical flow-matching pipeline (discrete binning of rotation/translation parameters to localize latent space, followed by continuous residual regression). No equations or claims in the abstract reduce a derived quantity to a fitted input by construction, nor do they rely on self-citation chains or uniqueness theorems imported from prior author work. The method is presented as an original architecture whose performance claims are empirical rather than tautological. This is the normal case of a self-contained technical proposal.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Structured denoising diffusion models in dis- crete state-spaces
Jacob Austin et al. “Structured denoising diffusion models in dis- crete state-spaces”. In:Advances in Neural Information Processing Systems34 (2021), pp. 17981–17993
2021
-
[2]
Sgpa: Structure-guided prior adaptation for category-level 6d object pose estimation
Kai Chen and Qi Dou. “Sgpa: Structure-guided prior adaptation for category-level 6d object pose estimation”. In:Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021, pp. 2773–2782
2021
-
[3]
Secondpose: Se (3)-consistent dual-stream feature fusion for category-level pose estimation
Yamei Chen et al. “Secondpose: Se (3)-consistent dual-stream feature fusion for category-level pose estimation”. In:Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2024, pp. 9959–9969
2024
-
[4]
The cityscapes dataset for semantic urban scene understanding
Marius Cordts et al. “The cityscapes dataset for semantic urban scene understanding”. In:Proceedings of the IEEE conference on computer vision and pattern recognition. 2016, pp. 3213–3223
2016
-
[5]
Gpv-pose: Category-level object pose estimation via geometry-guided point-wise voting
Yan Di et al. “Gpv-pose: Category-level object pose estimation via geometry-guided point-wise voting”. In:Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2022, pp. 6781–6791
2022
-
[6]
Discrete flow matching
Itai Gat et al. “Discrete flow matching”. In:Advances in Neural Information Processing Systems37 (2024), pp. 133345–133385
2024
-
[7]
Mask r-cnn
Kaiming He et al. “Mask r-cnn”. In:Proceedings of the IEEE international conference on computer vision. 2017, pp. 2961–2969
2017
-
[8]
Walking with augmented reality: A prelimi- nary assessment of visual feedback with a cable-driven active leg exoskeleton (C-ALEX)
Rand Hidayah et al. “Walking with augmented reality: A prelimi- nary assessment of visual feedback with a cable-driven active leg exoskeleton (C-ALEX)”. In:IEEE Robotics and Automation Letters 4.4 (2019), pp. 3948–3954
2019
-
[9]
RayPose: Ray Bundling Diffusion for Template Views in Unseen 6D Object Pose Estimation
Junwen Huang et al. “RayPose: Ray Bundling Diffusion for Template Views in Unseen 6D Object Pose Estimation”. In:Proceedings of the IEEE/CVF International Conference on Computer Vision. 2025, pp. 9102–9112
2025
-
[10]
Se (3) diffusion model-based point cloud registration for robust 6d object pose estimation
Haobo Jiang et al. “Se (3) diffusion model-based point cloud registration for robust 6d object pose estimation”. In:Advances in Neural Information Processing Systems36 (2023), pp. 21285–21297
2023
-
[11]
A Passive Power-Based Control Strategy for pHRI Tasks With Omni-Directional Robotic Mobile Platforms
Theodora Kastritsi and Arash Ajoudani. “A Passive Power-Based Control Strategy for pHRI Tasks With Omni-Directional Robotic Mobile Platforms”. In:IEEE Robotics and Automation Letters9.8 (2024), pp. 6959–6966
2024
-
[12]
Design and implementation of a ferrofluid- based liquid robot for small-scale manipulation
Fanxing Kong et al. “Design and implementation of a ferrofluid- based liquid robot for small-scale manipulation”. In:IEEE Robotics and Automation Letters9.4 (2023), pp. 3060–3067
2023
-
[13]
Gce-pose: Global context enhancement for category-level object pose estimation
Weihang Li et al. “Gce-pose: Global context enhancement for category-level object pose estimation”. In:Proceedings of the Com- puter Vision and Pattern Recognition Conference. 2025, pp. 27154– 27165
2025
-
[14]
Category-level articulated object pose estima- tion
Xiaolong Li et al. “Category-level articulated object pose estima- tion”. In:Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020, pp. 3706–3715
2020
-
[15]
Category-level 6d object pose and size estimation using self-supervised deep prior deformation networks
Jiehong Lin et al. “Category-level 6d object pose and size estimation using self-supervised deep prior deformation networks”. In:Euro- pean Conference on Computer Vision. Springer. 2022, pp. 19–34
2022
-
[16]
Dualposenet: Category-level 6d object pose and size estimation using dual pose network with refined learning of pose consistency
Jiehong Lin et al. “Dualposenet: Category-level 6d object pose and size estimation using dual pose network with refined learning of pose consistency”. In:Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021, pp. 3560–3569
2021
-
[17]
Vi-net: Boosting category-level 6d object pose estimation via learning decoupled rotations on the spherical represen- tations
Jiehong Lin et al. “Vi-net: Boosting category-level 6d object pose estimation via learning decoupled rotations on the spherical represen- tations”. In:Proceedings of the IEEE/CVF international conference on computer vision. 2023, pp. 14001–14011
2023
-
[18]
Flow matching for generative modeling
Yaron Lipman et al. “Flow matching for generative modeling”. In: arXiv preprint arXiv:2210.02747(2022)
Pith/arXiv arXiv 2022
-
[19]
Diff9d: Diffusion-based domain-generalized category- level 9-dof object pose estimation
Jian Liu et al. “Diff9d: Diffusion-based domain-generalized category- level 9-dof object pose estimation”. In:IEEE Transactions on Pattern Analysis and Machine Intelligence(2025)
2025
-
[20]
Monodiff9d: Monocular category-level 9d object pose estimation via diffusion model
Jian Liu et al. “Monodiff9d: Monocular category-level 9d object pose estimation via diffusion model”. In:2025 IEEE International Con- ference on Robotics and Automation (ICRA). IEEE. 2025, pp. 8687– 8694
2025
-
[21]
Category-Level Articulated Object 9D Pose Estima- tion via Reinforcement Learning
Liu Liu et al. “Category-Level Articulated Object 9D Pose Estima- tion via Reinforcement Learning”. In:Proceedings of the 31st ACM International Conference on Multimedia. 2023, pp. 728–736
2023
-
[22]
Toward real-world category-level articulation pose estimation
Liu Liu et al. “Toward real-world category-level articulation pose estimation”. In:IEEE Transactions on Image Processing31 (2022), pp. 1072–1083
2022
-
[23]
Category-level 6D pose estimation using geometry- guided instance-aware prior and multi-stage reconstruction
Tong Nie et al. “Category-level 6D pose estimation using geometry- guided instance-aware prior and multi-stage reconstruction”. In: IEEE Robotics and Automation Letters8.4 (2023), pp. 2381–2388
2023
-
[24]
Self-supervised category-level 6D object pose estimation with deep implicit shape representation
Wanli Peng et al. “Self-supervised category-level 6D object pose estimation with deep implicit shape representation”. In:Proceedings of the AAAI Conference on Artificial Intelligence. V ol. 36. 2. 2022, pp. 2082–2090
2022
-
[25]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space
Charles Ruizhongtai Qi et al. “Pointnet++: Deep hierarchical feature learning on point sets in a metric space”. In:Advances in neural information processing systems30 (2017)
2017
-
[26]
i2c-net: Using instance-level neural networks for monocular category-level 6D pose estimation
Alberto Remus et al. “i2c-net: Using instance-level neural networks for monocular category-level 6D pose estimation”. In:IEEE Robotics and Automation Letters8.3 (2023), pp. 1515–1522
2023
-
[27]
Denoising Dif- fusion Implicit Models
Jiaming Song, Chenlin Meng, and Stefano Ermon. “Denoising Dif- fusion Implicit Models”. In:International Conference on Learning Representations. 2021
2021
-
[28]
Language-Embedded 6D Pose Estimation for Tool Manipulation
Yuyang Tu et al. “Language-Embedded 6D Pose Estimation for Tool Manipulation”. In:IEEE Robotics and Automation Letters(2025)
2025
-
[29]
Normalized object coordinate space for category- level 6d object pose and size estimation
He Wang et al. “Normalized object coordinate space for category- level 6d object pose and size estimation”. In:Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019, pp. 2642–2651
2019
-
[30]
Category-level 6d object pose estimation via cascaded relation and recurrent reconstruction net- works
Jiaze Wang, Kai Chen, and Qi Dou. “Category-level 6d object pose estimation via cascaded relation and recurrent reconstruction net- works”. In:2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. 2021, pp. 4807–4814
2021
-
[31]
Di2Pose: Discrete Diffusion Model for Occluded 3D Human Pose Estimation
Weiquan Wang et al. “Di2Pose: Discrete Diffusion Model for Occluded 3D Human Pose Estimation”. In:Advances in Neural Information Processing Systems37 (2024), pp. 98717–98741
2024
-
[32]
Captra: Category-level pose tracking for rigid and articulated objects from point clouds
Yijia Weng et al. “Captra: Category-level pose tracking for rigid and articulated objects from point clouds”. In:Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021, pp. 13209–13218
2021
-
[33]
6d-diff: A keypoint diffusion framework for 6d object pose estimation
Li Xu et al. “6d-diff: A keypoint diffusion framework for 6d object pose estimation”. In:Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2024, pp. 9676–9686
2024
-
[34]
OMAD: Object Model with Articulated Defor- mations for Pose Estimation and Retrieval
Han Xue et al. “OMAD: Object Model with Articulated Defor- mations for Pose Estimation and Retrieval”. In:arXiv preprint arXiv:2112.07334(2021)
arXiv 2021
-
[35]
Generative category- level object pose estimation via diffusion models
Jiyao Zhang, Mingdong Wu, and Hao Dong. “Generative category- level object pose estimation via diffusion models”. In:Advances in Neural Information Processing Systems36 (2023), pp. 54627–54644
2023
-
[36]
GaPT-DAR: Category-level Garments Pose Tracking via Integrated 2D Deformation and 3D Reconstruction
Li Zhang et al. “GaPT-DAR: Category-level Garments Pose Tracking via Integrated 2D Deformation and 3D Reconstruction”. In:Proceed- ings of the Computer Vision and Pattern Recognition Conference. 2025, pp. 22638–22647
2025
-
[37]
Rˆ 2-Art: Category-Level Articulation Pose Es- timation from Single RGB Image via Cascade Render Strategy
Li Zhang et al. “Rˆ 2-Art: Category-Level Articulation Pose Es- timation from Single RGB Image via Cascade Render Strategy”. In:Proceedings of the AAAI Conference on Artificial Intelligence. V ol. 39. 9. 2025, pp. 9985–9993
2025
-
[38]
U-COPE: Taking a Further Step to Universal 9D Category-Level Object Pose Estimation
Li Zhang et al. “U-COPE: Taking a Further Step to Universal 9D Category-Level Object Pose Estimation”. In:European Conference on Computer Vision. Springer. 2025, pp. 254–270
2025
-
[39]
Rbp-pose: Residual bounding box projection for category-level pose estimation
Ruida Zhang et al. “Rbp-pose: Residual bounding box projection for category-level pose estimation”. In:Computer Vision–ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part I. Springer. 2022, pp. 655–672
2022
-
[40]
6d-vit: Category-level 6d object pose estimation via transformer-based instance representation learning
Lu Zou et al. “6d-vit: Category-level 6d object pose estimation via transformer-based instance representation learning”. In:IEEE Transactions on Image Processing31 (2022), pp. 6907–6921
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.